







官方链接:BearPi-Pico H3863 | 小熊派BearPi
1. 环境搭建:
1.1 开发工具下载安装
| 名称 | 用途 | 获取途径 |
|---|---|---|
| HiSparkStudio一键环境安装包 | 安装HiSpark Studio依赖的python环境 | 点击跳转 |
| HiSpark Studio | 开发板编译工具 | 点击跳转 |
| BurnTool_H3863 | 代码烧录工具 | 点击跳转 |
| CH340驱动 | 开发板USB驱动 | 点击跳转 |
注:
- 安装时全部选择默认即可,建议安装在默认目录(开发工具本身体积小,占用存储空间小)
- Windows11或高版本Windows10开发板与电脑通过串口连接后会自动下载CH340驱动,无需再手动安装CH340
- 所有安装目录及父目录不要出现中文字符
- 安装后建议重启一次电脑
1.2 获取项目SDK
使用git工具拉取
git clone https://gitee.com/bearpi/bearpi-pico_h3863.git直接下载压缩包并解压
https://gitee.com/bearpi/bearpi-pico_h3863/repository/archive/master.zip
1.3创建工程
打开 HiSpark Studio 工具,进入欢迎页面,单击“新建工程”,进入新建工程页面
 芯片选择“WS63”,开发板选择“ws63”,工程名自定义填写,软件包路径选择SDK代码“bearpi-pico_h3863”层级, 点击“完成”
芯片选择“WS63”,开发板选择“ws63”,工程名自定义填写,软件包路径选择SDK代码“bearpi-pico_h3863”层级, 点击“完成”
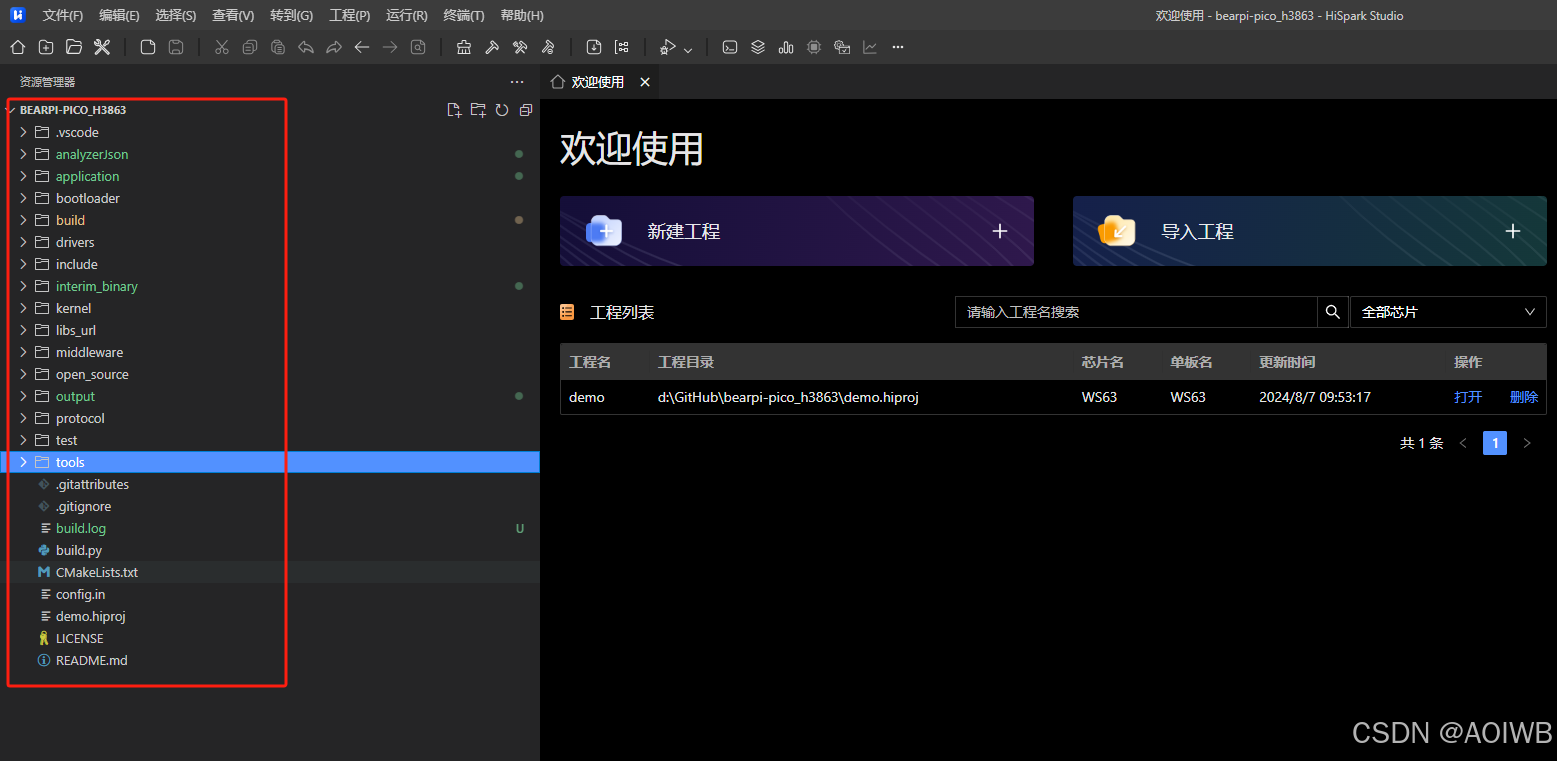
 新建工程成功后如下图所示代码结构
新建工程成功后如下图所示代码结构
注:上述部分为复述官方开发文档内容,方便大家直接在本文档上进行阅读并安装,接下来进行HelloWorld的输出部分的编写
1.3 HelloWorld案例实现
1.3.1 代码实现
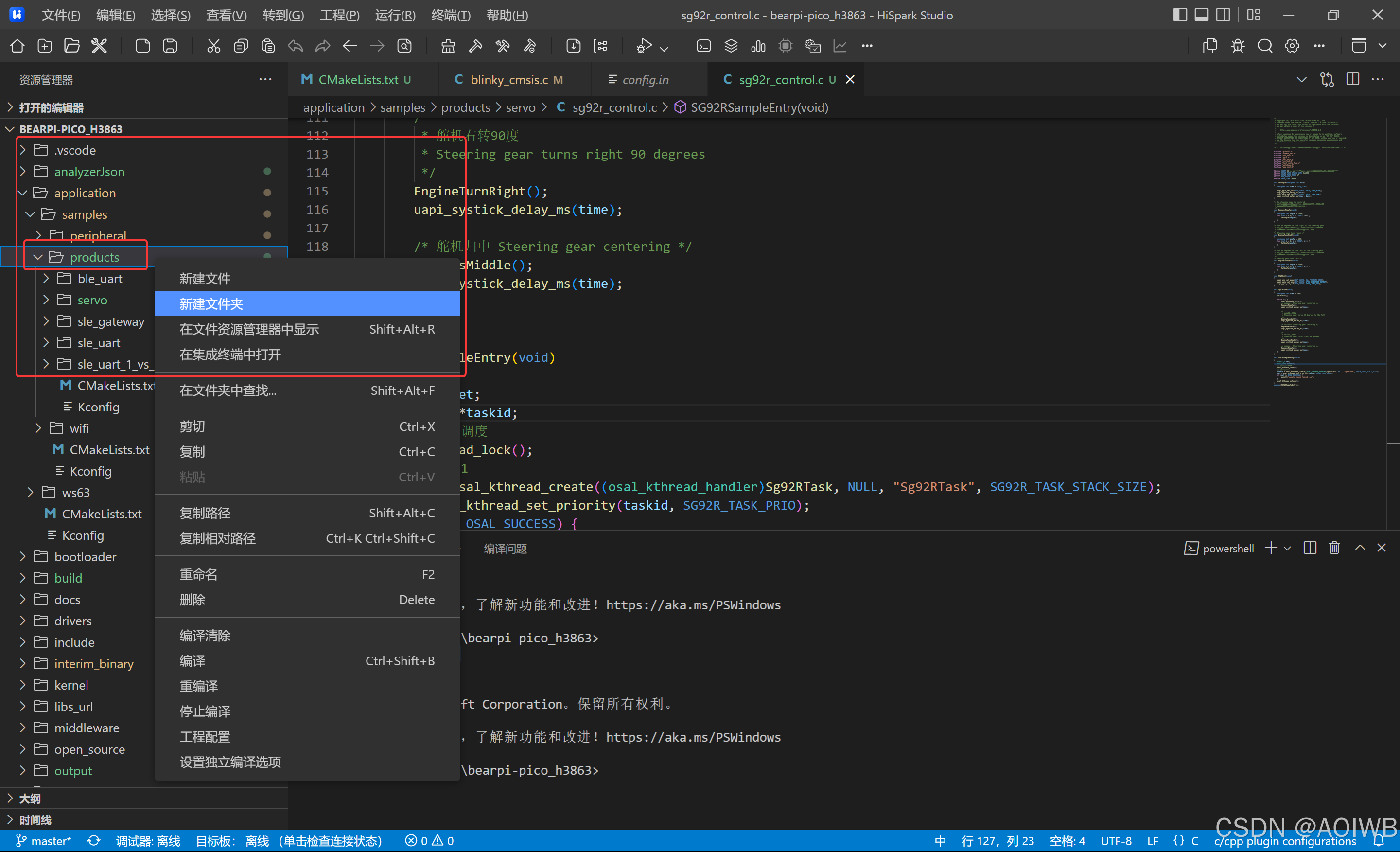
在application/samples/products下新建文件夹hello_world
在新建的文件夹hello_world下新建hell_world.c文件和CMakelists.txt文件
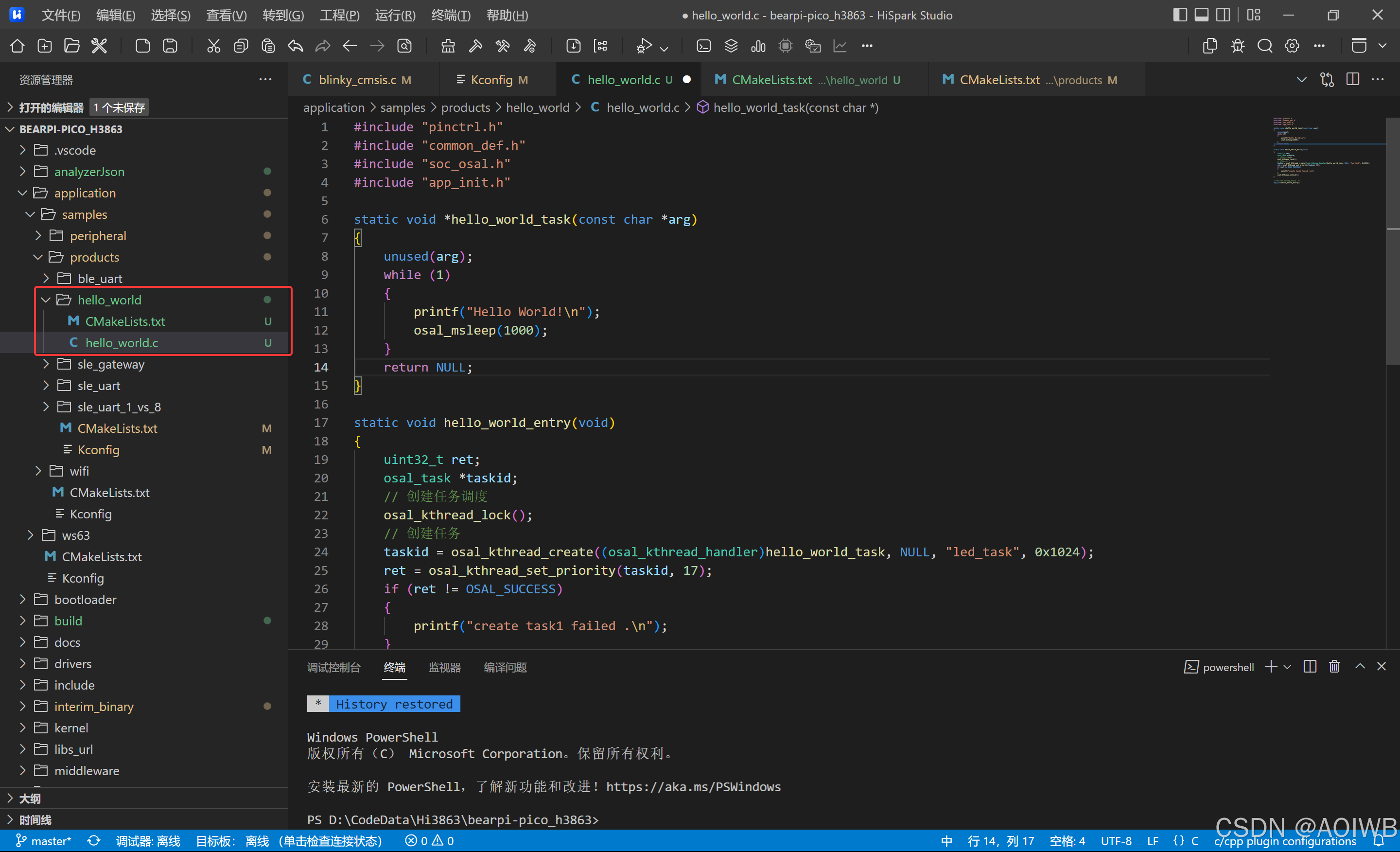
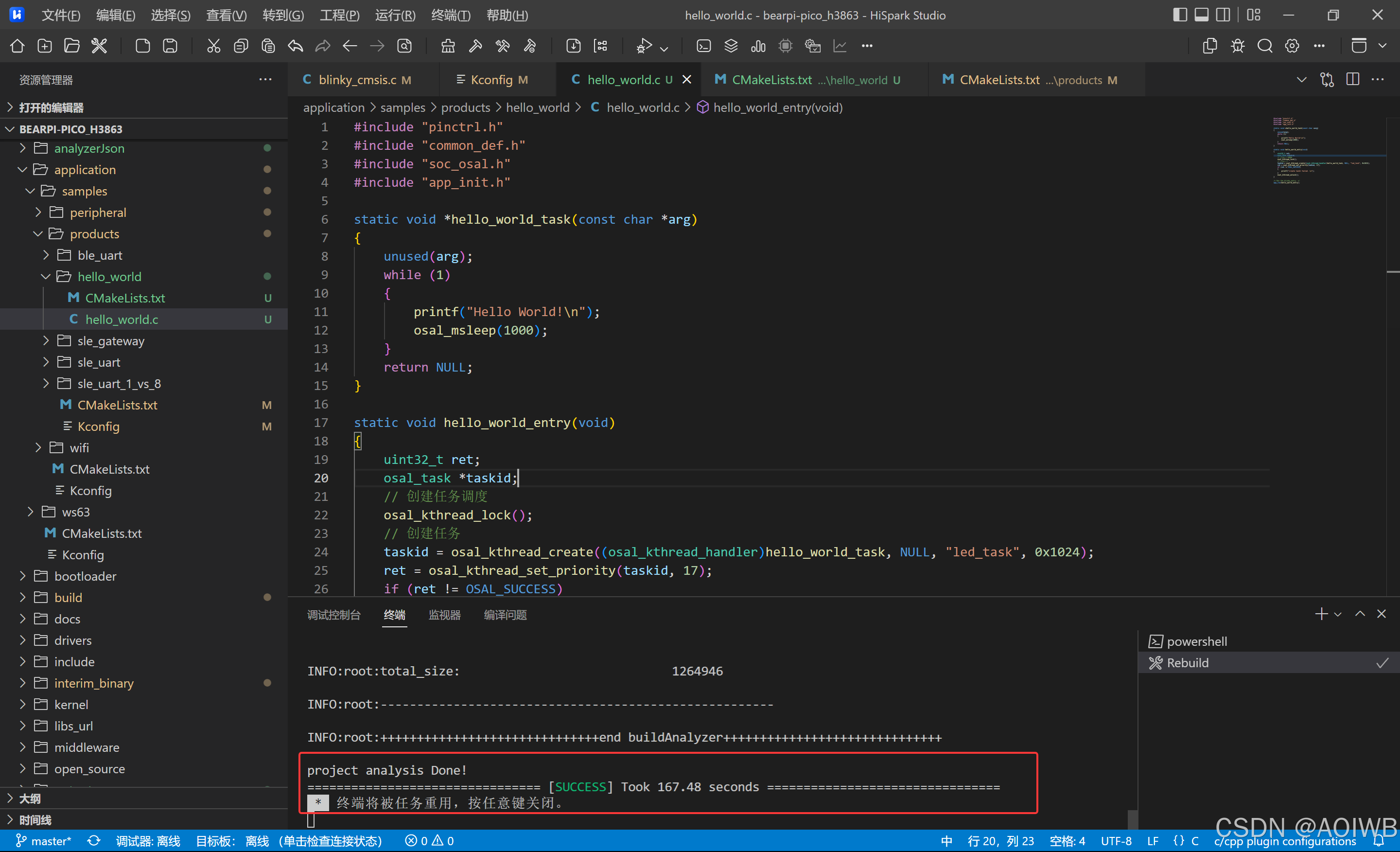
hello_world.c
// application>samples>project>hello_world>hello_woeld.c
#include "pinctrl.h"
#include "common_def.h"
#include "soc_osal.h"
#include "app_init.h"
static void *hello_world_task(const char *arg)
{
unused(arg);
while (1)
{
printf("Hello World!\n");
osal_msleep(1000);
}
return NULL;
}
static void hello_world_entry(void)
{
uint32_t ret;
osal_task *taskid;
// 创建任务调度
osal_kthread_lock();
// 创建任务
taskid = osal_kthread_create((osal_kthread_handler)hello_world_task, NULL, "led_task", 0x1024);
ret = osal_kthread_set_priority(taskid, 17);
if (ret != OSAL_SUCCESS)
{
printf("create task1 failed .\n");
}
osal_kthread_unlock();
}
/* Run the blinky_entry. */
app_run(hello_world_entry);CMakeLists.txt
set(SOURCES
"${SOURCES}"
"${CMAKE_CURRENT_SOURCE_DIR}/hello_world.c"
PARENT_SCOPE
)
在与hello_world文件夹同层级目录下的CMakeLists.txt和Kconfig添加配置代码
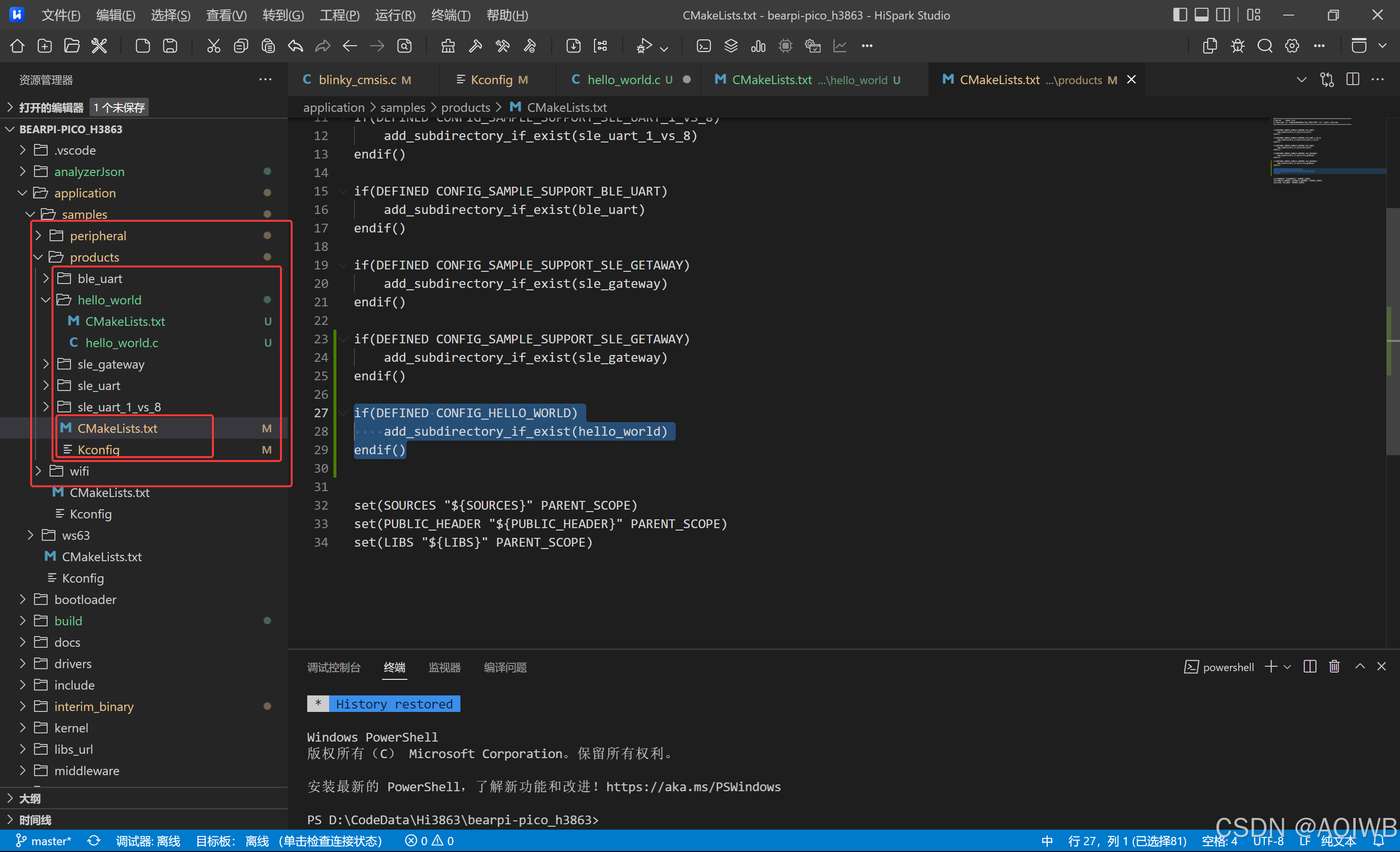
CmakeLists.txt
(按照上图方式进行添加即可)
if(DEFINED CONFIG_HELLO_WORLD)
add_subdirectory_if_exist(hello_world)
endif()KConfig
# 布尔类型的配置选项,用于启用或禁用 Hello World 示例
config HELLO_WORLD
bool
# 提示信息,当用户配置内核时会显示此提示
prompt "Hello World Sample"
# 默认值为 n,即默认情况下不启用此选项
default n
# 此选项依赖于 ENABLE_PRODUCTS_SAMPLE,如果 ENABLE_PRODUCTS_SAMPLE 未启用,则此选项不可用
depends on ENABLE_PRODUCTS_SAMPLE
# 帮助信息,解释此选项的作用
help
# 启用此选项表示支持 Hello World 示例
This option means support HELLO_WORLD Sample.
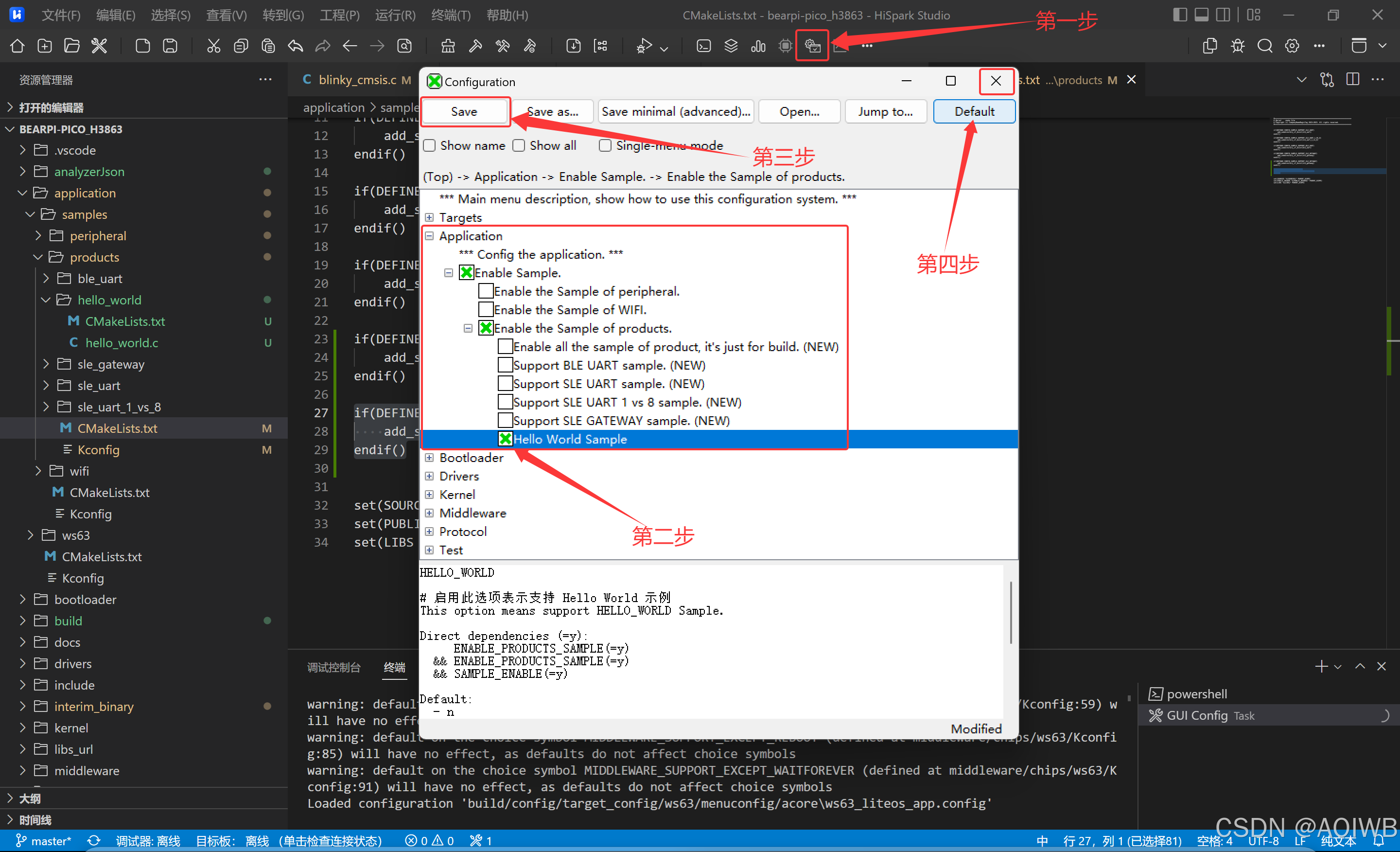
1.3.2 系统配置(编译前的准备)
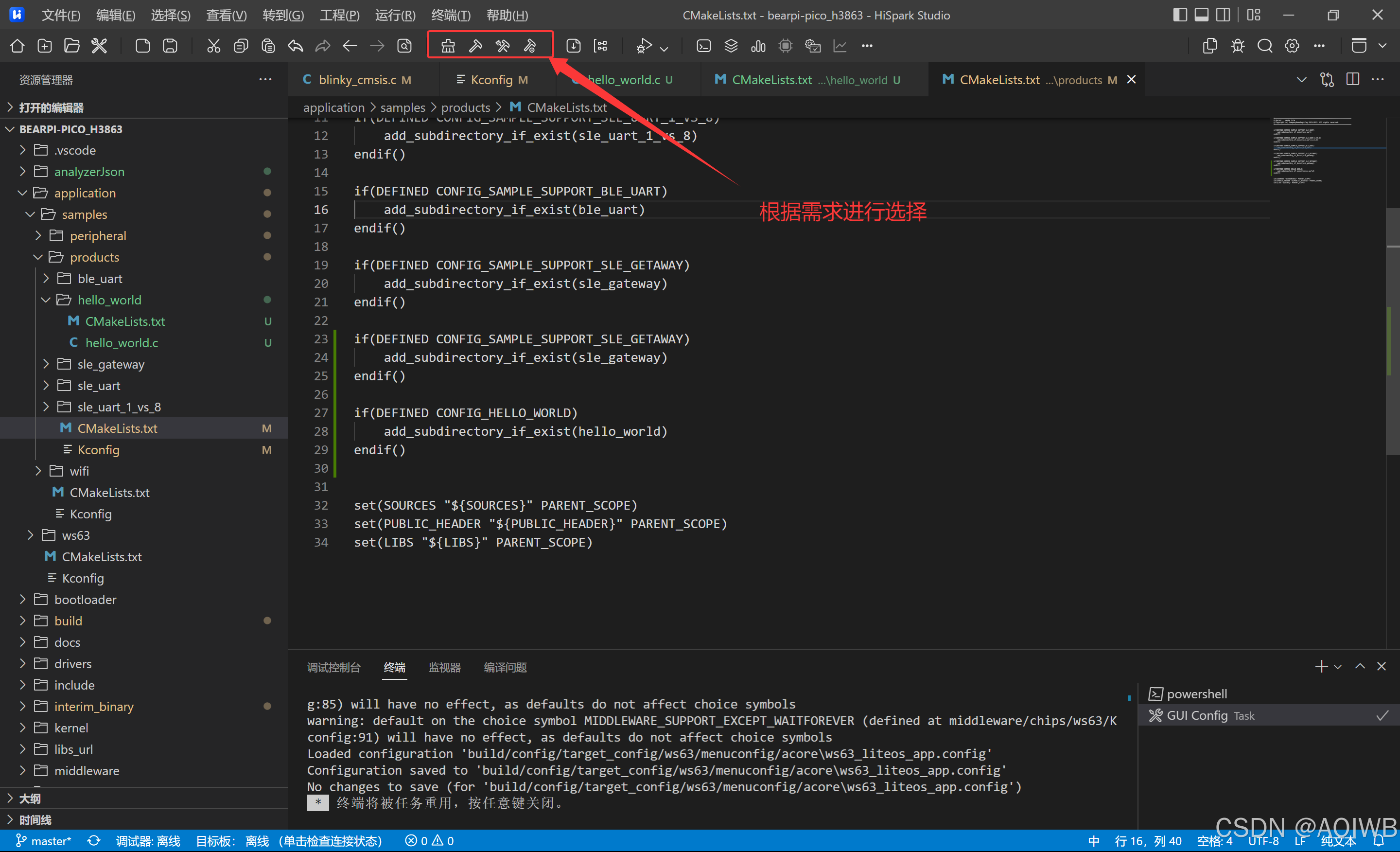
1.3.3 编译
1.3.4 工程配置(烧录前的准备)
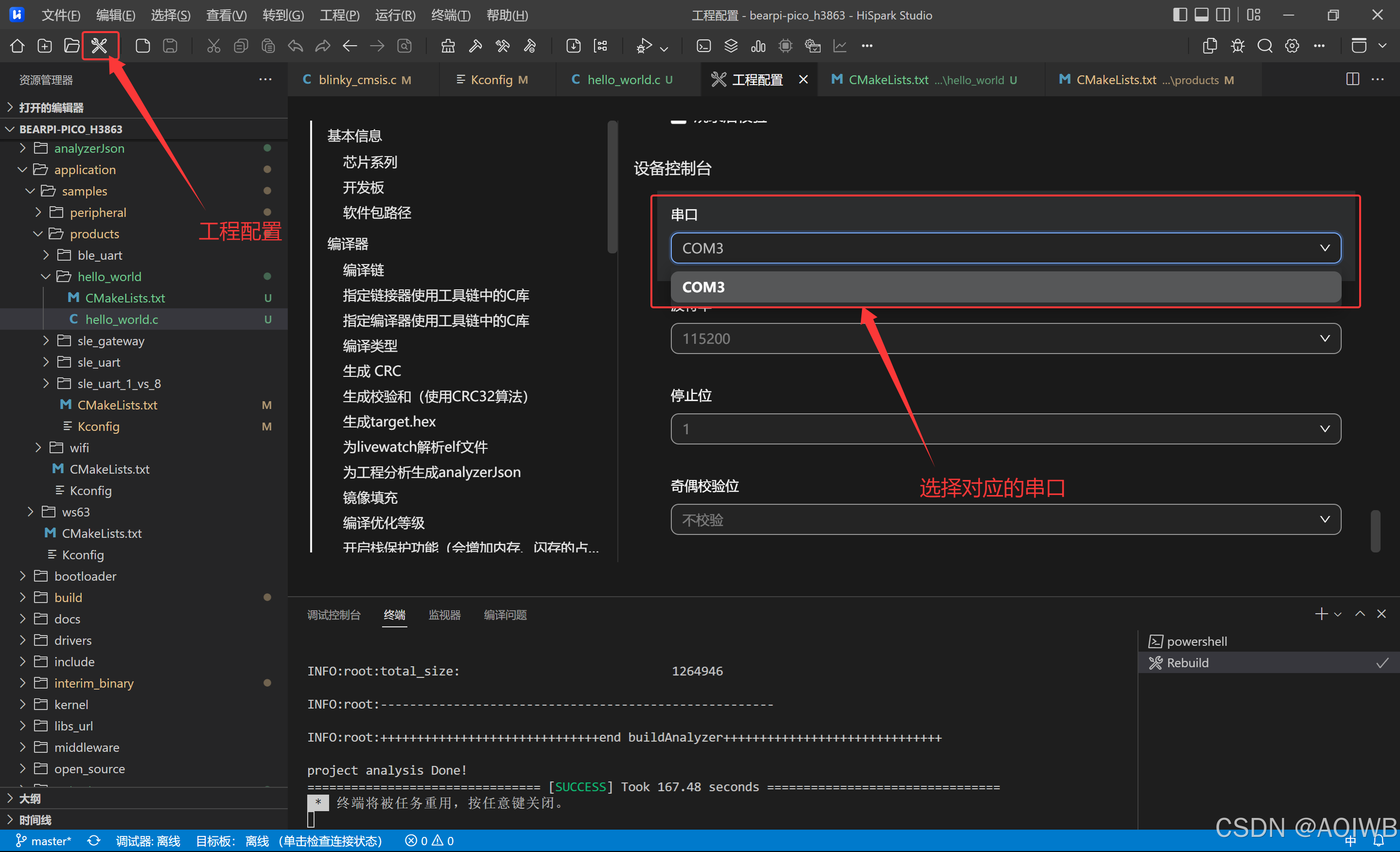
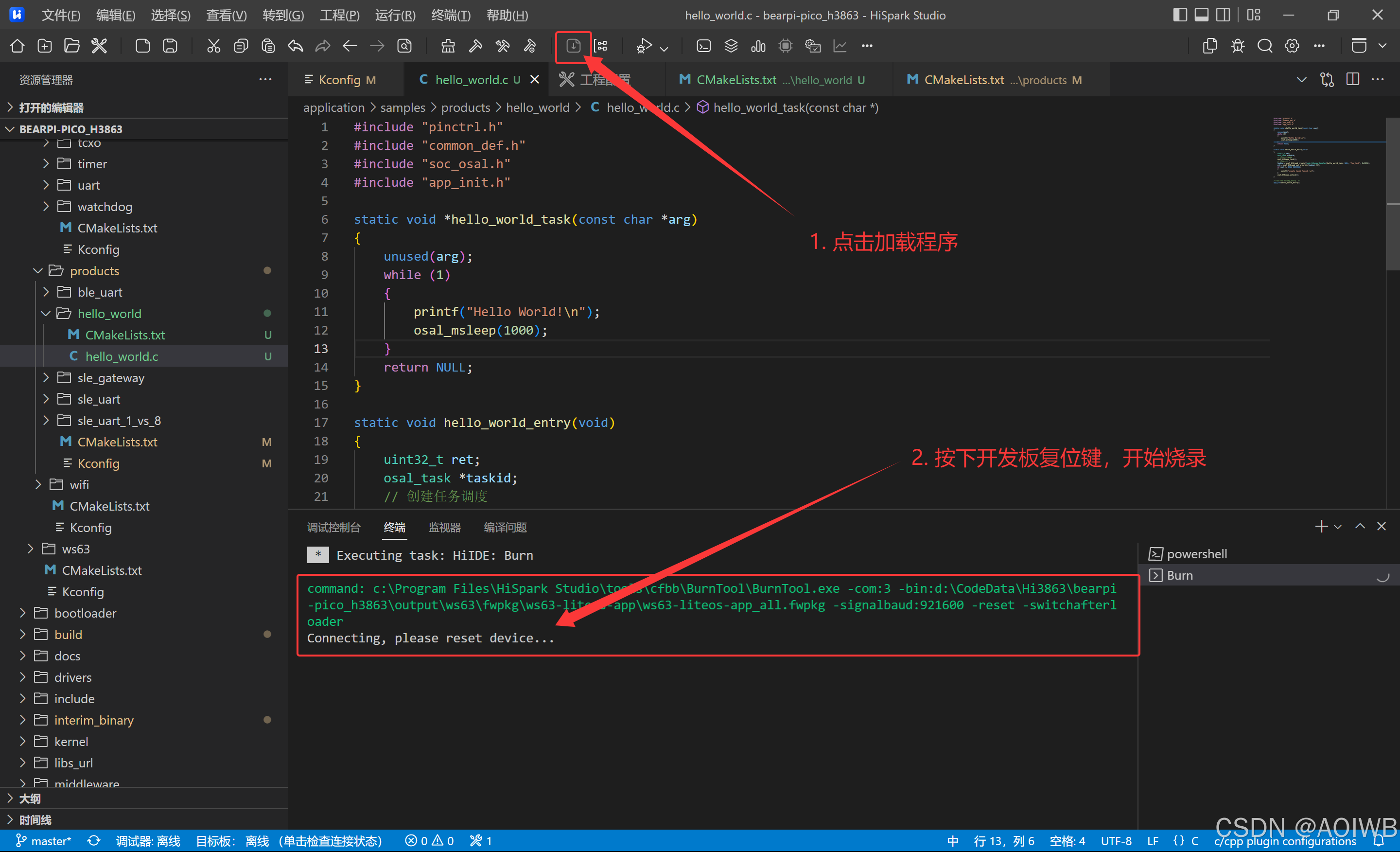
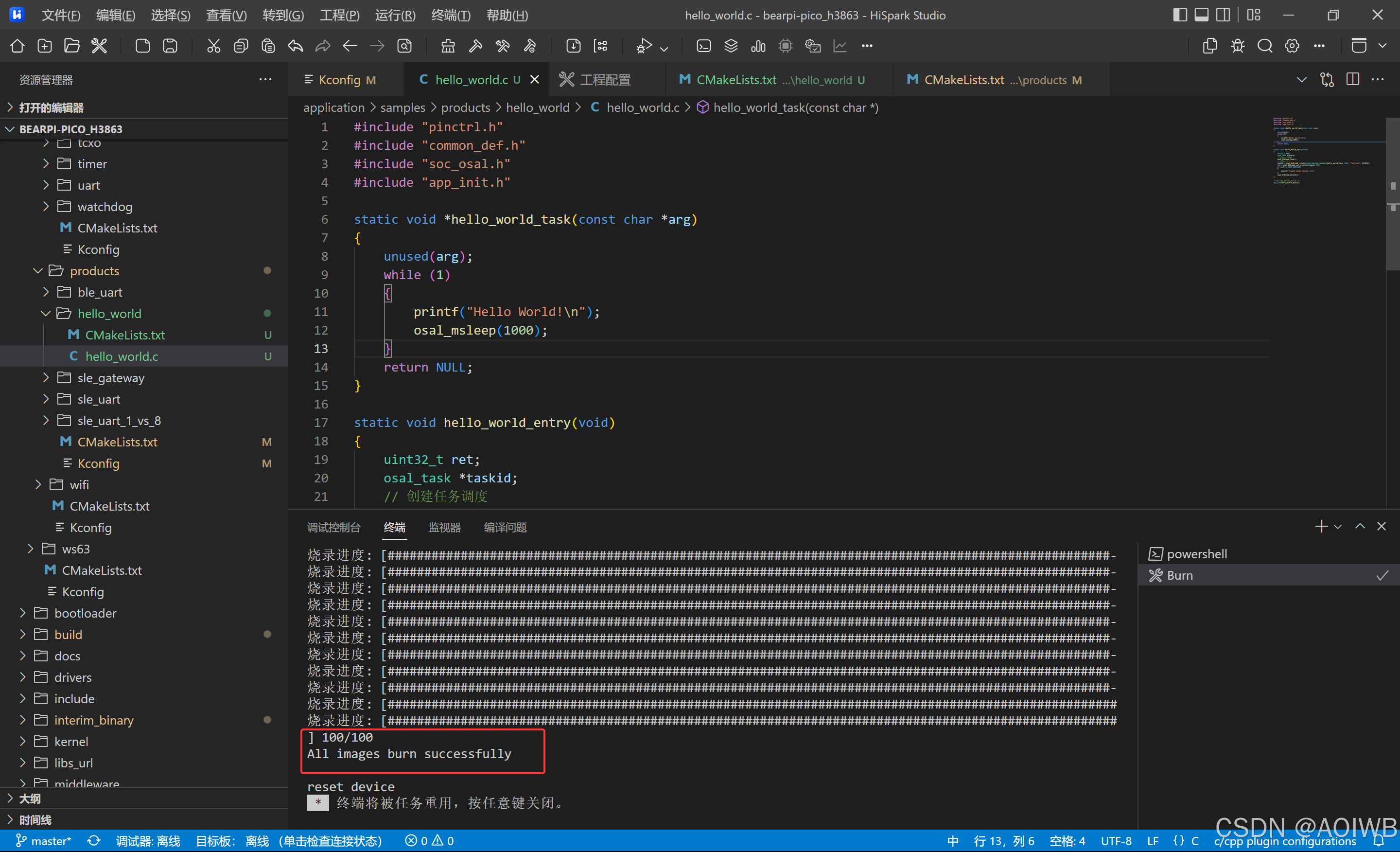
1.3.5 烧录
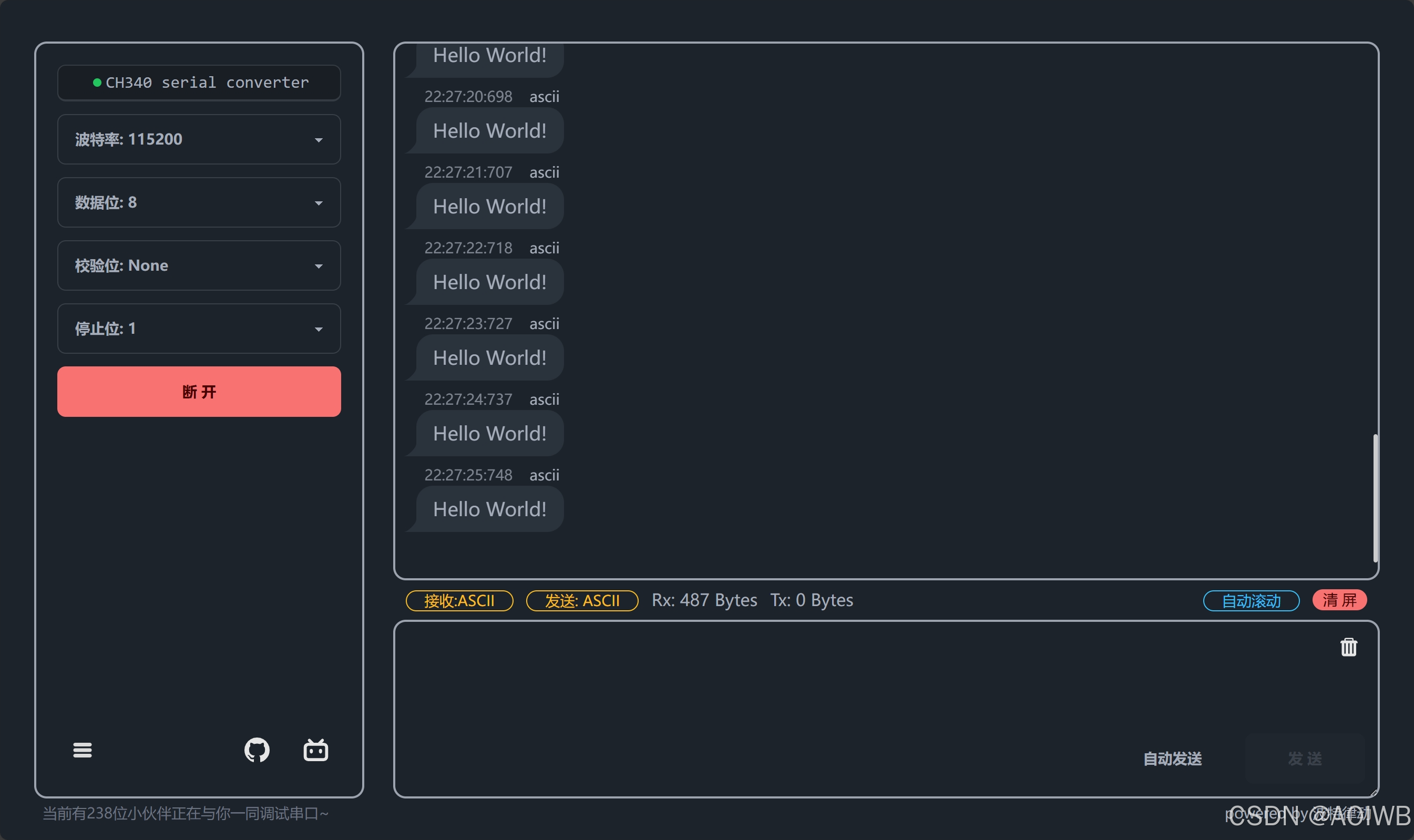
1.3.6 通过串口工具观察现象


















 2718
2718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









