







 本文详细介绍了3DCNN框架结构的计算过程,包括输入层、硬线层、卷积层等,并探讨了如何通过不同卷积核提取视频的时间和空间特征。
本文详细介绍了3DCNN框架结构的计算过程,包括输入层、硬线层、卷积层等,并探讨了如何通过不同卷积核提取视频的时间和空间特征。
3D CNN框架结构各层详细计算过程
这篇博客主要详细介绍3D CNN框架结构的计算过程,我们都知道3D CNN 在视频分类,动作识别等领域发挥着巨大的优势,前两个星期看了这篇文章:3D Convolutional Neural Networks for Human Action Recognition,打算用这个框架应用于动态表情识别,当时对这篇文章的3 D CNN各层maps的计算不怎么清楚,所以自己另外对3D CNN结构层数maps等等重新计算了一下,下面是主要的计算过程。在介绍计算过程之前,先介绍一下 2D CNN和3D CNN的区别
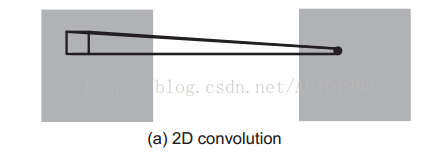
采用2D CNN对视频进行操作的方式,一般都是对视频的每一帧图像分别利用CNN来进行识别,这种方式的识别没有考虑到时间维度的帧间运动信息。下面是传统的2DCNN对图像进行采用2D卷积核进行卷积操作:
使用3D CNN能更好的捕获视频中的时间和空间的特征信息,以下是3D CNN对图像序列(视频)采用3D卷积核进行卷积操作:
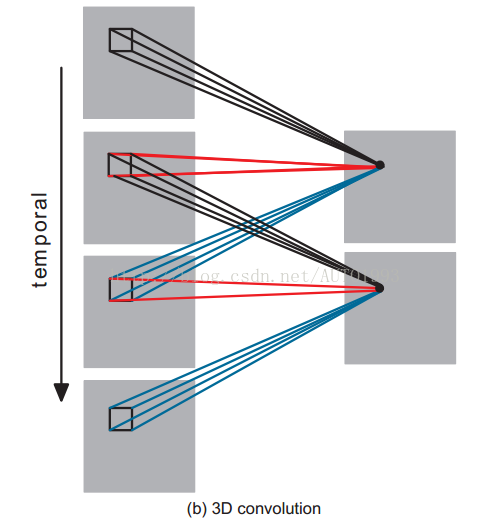
上面进行卷积操作的时间维度为3,即对连续的三帧图像进行卷积操作,上面的 3D卷积是通过堆叠多个连续的帧组成一个立方体,然后在立方体中运用3D卷积核。在这个结构中,卷积层中每一个特征map都会与上一层中多个邻近的连续帧相连,因此捕捉运动信息。例如上面左图,一个卷积map的某一位置的值是通过卷积上一层的三个连续的帧的同一个位置的局部感受野得到的。
需要注意的是:3D卷积核只能从cube中提取一种类型的特征,因为在整个cube中卷积核的权值都是一样的,也就是共享权值,都是同一个卷积核(图中同一个颜色的连接线表示相同的权值)。我们可以采用多种卷积核,以提取多种特征。
3D CNN架构
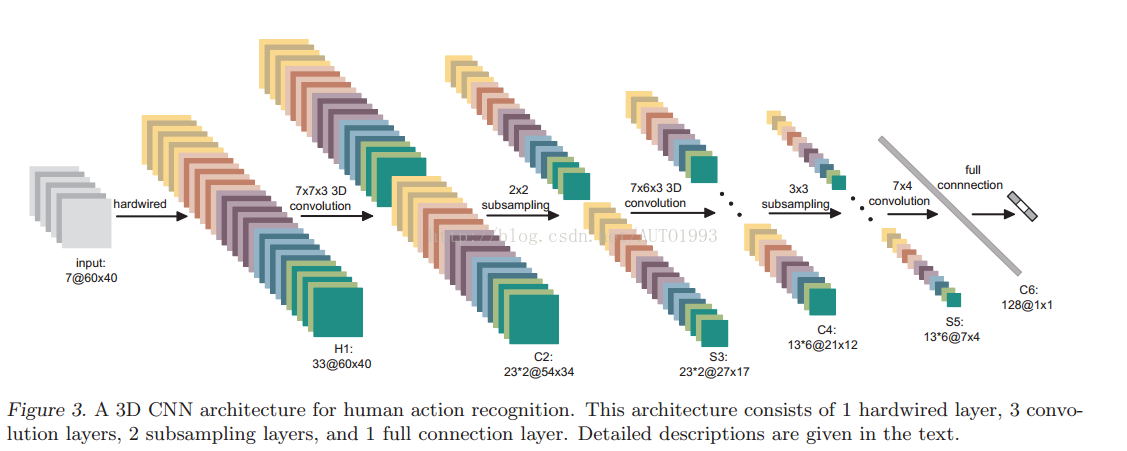
输入层(input):连续的大小为60*40的视频帧图像作为输入。.
硬线层(hardwired,H1):每帧提取5个通道信息(灰度gray,横坐标梯度(gradient-x),纵坐标梯度(gradient-y),x光流(optflow-x),y光流(optflow-y))。前面三个通道的信息可以直接对每帧分别操作获取,后面的光流(x,y)则需要利用两帧的信息才能提取,因此
H1层的特征maps数量:(7+7+7+6+6=33),特征maps的大小依然是60* 40;
卷积层(convolution C2):以硬线层的输出作为该层的输入,对输入5个通道信息分别使用大小为7* 7 * 3的3D卷积核进行卷积操作(7* 7表示空间维度,3表示时间维度,也就是每次操作3帧图像),同时,为了增加特征maps的个数,在这一层采用了两种不同的3D卷积核,因此C2层的特征maps数量为:
(((7-3)+1)* 3+((6-3)+1)* 2)* 2=23* 2
这里右乘的2表示两种卷积核。
特征maps的大小为:((60-7)+1)* ((40-7)+1)=54 * 34
降采样层(sub-sampling S3):在该层采用max pooling操作,降采样之后的特征maps数量保持不变,因此S3层的特征maps数量为:23 *2
特征maps的大小为:((54 / 2) * (34 /2)=27 *17
卷积层(convolution C4):对两组特征maps分别采用7 6 3的卷积核进行操作,同样为了增加特征maps的数量,文中采用了三种不同的卷积核分别对两组特征map进行卷积操作。这里的特征maps的数量计算有点复杂,请仔细看清楚了
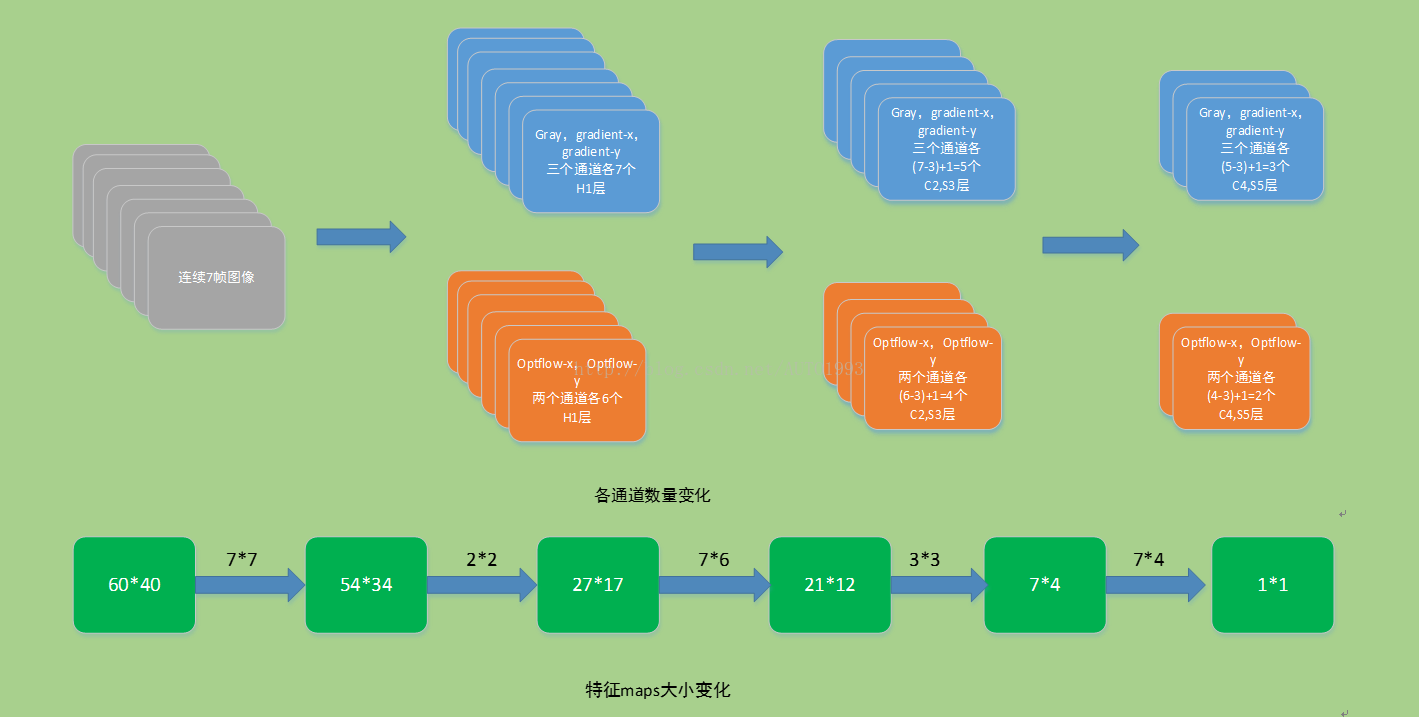
我们知道,从输入的7帧图像获得了5个通道的信息,因此结合总图S3的上面一组特征maps的数量为((7-3)+1) * 3+((6-3)+1) * 2=23,可以获得各个通道在S3层的数量分布:
前面的乘3表示gray通道maps数量= gradient-x通道maps数量= gradient-y通道maps数量=(7-3)+1)=5;
后面的乘2表示optflow-x通道maps数量=optflow-y通道maps数量=(6-3)+1=4;
假设对总图S3的上面一组特征maps采用一种7 6 3的3D卷积核进行卷积就可以获得:
((5-3)+1)* 3+((4-3)+1)* 2=9+4=13;
三种不同的3D卷积核就可获得13* 3个特征maps,同理对总图S3的下面一组特征maps采用三种不同的卷积核进行卷积操作也可以获得13*3个特征maps,
因此C4层的特征maps数量:13* 3* 2=13* 6
C4层的特征maps的大小为:((27-7)+1)* ((17-6)+1)=21*12
降采样层(sub-sampling S5):对每个特征maps采用3 3的核进行降采样操作,此时每个maps的大小:7* 4
在这个阶段,每个通道的特征maps已经很小,通道maps数量分布情况如下:
gray通道maps数量= gradient-x通道maps数量= gradient-y通道maps数量=3
optflow-x通道maps数量=optflow-y通道maps数量=2;
卷积层(convolution C6):此时对每个特征maps采用7* 4的2D卷积核进行卷积操作,此时每个特征maps的大小为:1*1,至于数量为128是咋来的,就不咋清楚了,估计是经验值。
对于CNNs,有一个通用的设计规则就是:在后面的层(离输出层近的)特征map的个数应该增加,这样就可以从低级的特征maps组合产生更多类型的特征。
通过多层的卷积和降采样,每连续7帧图像就可以获得128维的特征向量。输出层的单元数与视频动作数是相同的,输出层的每个单元与这128维的特征向量采用全连接。在后面一般采用线性分类器对128维的特征向量进行分类,实现行为识别,3DCNN模型中所有可训练的参数都是随机初始化的,然后通过在线BP算法进行训练。
下面是3DCNN各通道数量变化情况以及特征maps大小变化情况

















 4263
4263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









