







 本文探讨了汽车操作系统的重要性,特别是安全车载操作系统、智能驾驶操作系统和智能座舱操作系统。介绍了特斯拉、大众、华为、英伟达和百度等在汽车操作系统方面的方案,以及它们的特点。文章还讨论了国内外主流操作系统的发展现状,强调了操作系统在自动驾驶和智能座舱中的核心作用。
本文探讨了汽车操作系统的重要性,特别是安全车载操作系统、智能驾驶操作系统和智能座舱操作系统。介绍了特斯拉、大众、华为、英伟达和百度等在汽车操作系统方面的方案,以及它们的特点。文章还讨论了国内外主流操作系统的发展现状,强调了操作系统在自动驾驶和智能座舱中的核心作用。
前言
软件定义汽车背景下,操作系统是汽车生态发展的灵魂。随着汽车电动化、智能化、网联化的发展,汽车操作系统已经成为车辆中重要的组成部分之一,一定程度上决定了车辆的安全性、舒适度、智能化水平和整体性能。
1、汽车操作系统简介
汽车操作系统是运行在异构分布硬件架构上的实时安全平台软件,提供整车及部件感知、规划、控制等功能框架并向上支撑智能网联驾驶生态的软件集合,是汽车智能计算基础平台安全、实时和高效运行的重要基础和核心支撑。
汽车操作系统包括安全车载操作系统、智能驾驶操作系统和智能座舱操作系统。
① 安全车载操作系统

安全车载操作系统主要面向经典车辆控制领域,如动力系统、底盘系统和车身系统等,该类操作系统对实时性和安全性要求极高,生态发展已趋于成熟。
安全车载操作系统主要是实时操作系统RTOS,主要应用对象是 ECU。ECU对安全车载操作系统最基本的要求是高实时性,系统需要在规定时间内完成资源分配、任务同步等指定动作。嵌入式实时操作系统具有高可靠性、实时性、交互性以及多路性的优势,系统响应极高,通常在毫秒或者微秒级别,满足了高实时性的要求。
目前,主流的安全车载操作系统都兼容 OSEK/VDX 和 Classic AUTOSAR 这两类汽车电子软件标准。其中,Classic 平台基于 OSEK/VDX 标准,定义了安全车载操作系统的技术规范。
② 智能驾驶操作系统
 随着智能化、网联化技术的发展,智能汽车感知融合、决策规划和控制执行功能带来了更为复杂算法并产生大量的数据,需要更高的计算能力与数据通信能力。基于 OSEK/VDX 和 Classic AUTOSAR 软件架构的安全车载操作系统已经不能满足未来自动驾驶汽车的发展需求,AUTOSAR 组织为面向更复杂的域控制器和中央计算平台的集中式电子电气架构推出 Adaptive AUTOSAR 平台。
随着智能化、网联化技术的发展,智能汽车感知融合、决策规划和控制执行功能带来了更为复杂算法并产生大量的数据,需要更高的计算能力与数据通信能力。基于 OSEK/VDX 和 Classic AUTOSAR 软件架构的安全车载操作系统已经不能满足未来自动驾驶汽车的发展需求,AUTOSAR 组织为面向更复杂的域控制器和中央计算平台的集中式电子电气架构推出 Adaptive AUTOSAR 平台。
Adaptive AUTOSAR 定义采用了基于 POSIX 标准的操作系统,可以为支持 POSIX 标准的操作系统及不同的应用需求提供标准化的平台接口和应用服务,主要是为了适应汽车智能化的发展需求。Adaptive AUTOSAR 处于发展初期,其生态建设获得 Tier1、主机厂的普遍认可尚需时日。
智能驾驶操作系统主要面向智能驾驶领域,应用于智能驾驶域控制器,该类操作系统对安全性和可靠性要求较高,同时对性能和运算能力的要求也较高。该类操作系统目前在全世界范围内日趋成熟,但生态尚未完备。
③ 智能座舱操作系统

智能座舱操作系统主要为汽车信息娱乐服务以及车内人机交互提供控制平台,是汽车实现座舱智能化与多源信息融合的运行环境,对操作系统的实时性与可靠性要求并不严苛。
主流车型的智能座舱操作主要包括QNX、Linux、Android等,传统智能座舱操作系统中QNX占据了绝大部分份额,近年来,智能座舱的娱乐与信息服务属性越发凸显,开源的Linux以及在手机端拥有大量成熟信息服务资源的Android被众多主机厂青睐,成为后起之秀。此外,国外少量车型还采用了Win CE等作为智能座舱操作系统。
随着人们对车辆由单纯交通工具向智能移动终端转变的需求,智能座舱操作系统需要支持多样化的应用与服务,并且具有丰富的生态资源。
2、国内外主流汽车操作系统方案简介
随着自动驾驶技术的快速发展,汽车对软件特别是操作系统的变革需求越来越高,主机厂、Tier1供应商和自动驾驶软硬件技术方案提供商纷纷投入大量的人力、物力和财力进行汽车操作系统的研发,希望在软件定义汽车的时代能够占据一席之地。下面对目前国内外主流汽车操作系统的开发和应用情况进行简单介绍。
① 特斯拉Autopilot自动驾驶软件架构
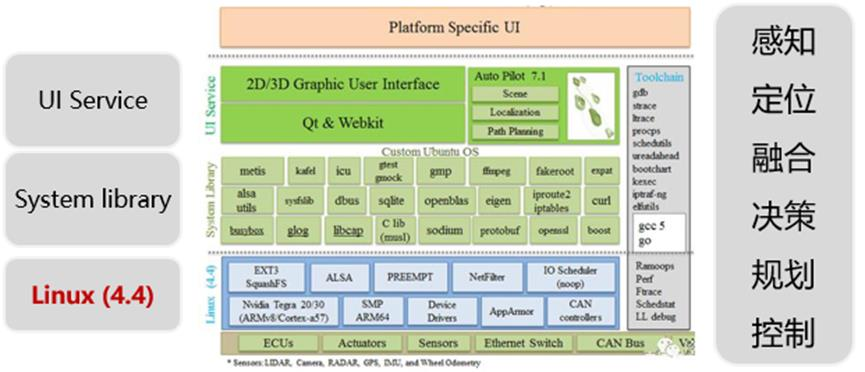 众所周知,特斯拉是自动驾驶技术和产业化的领跑者,其优势在于以计算平台为核心,自研并领先芯片硬件、操作系统、平台软件等。特斯拉自动驾驶软件架构如上图所示,主要特点是其操作系统基于单一Linux内核,打造了整套自动驾驶的软件方案,实现了感知、定位、融合、决策、规划到控制的全流程。
众所周知,特斯拉是自动驾驶技术和产业化的领跑者,其优势在于以计算平台为核心,自研并领先芯片硬件、操作系统、平台软件等。特斯拉自动驾驶软件架构如上图所示,主要特点是其操作系统基于单一Linux内核,打造了整套自动驾驶的软件方案,实现了感知、定位、融合、决策、规划到控制的全流程。
从公开的信息可知,系统基于Ubuntu进行裁剪,对Linux内核进行了实时性改造,这个内核也开源在Github上,深度学习框架基于PyTorch,实时数据处理基于开源流处理平台Kafka,拥有48个独立的神经网络进行多维度数据处理,并且具备强大的OTA升级能力。其FSD(Full Self-Driving&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









