







 本文详细介绍了GPS定位中伪距的概念,以及如何利用四颗卫星的伪距数据,结合迭代法求解用户三维坐标和时钟偏差的过程。通过泰勒展开和偏导数计算,形成线性方程组,最终使用MATLAB进行矩阵运算得到精确位置。实验表明,即使初始值不准确,迭代法也能快速收敛至准确位置。
本文详细介绍了GPS定位中伪距的概念,以及如何利用四颗卫星的伪距数据,结合迭代法求解用户三维坐标和时钟偏差的过程。通过泰勒展开和偏导数计算,形成线性方程组,最终使用MATLAB进行矩阵运算得到精确位置。实验表明,即使初始值不准确,迭代法也能快速收敛至准确位置。
用户到卫星的距离可以先简单理解成通过光速×时间差得到
而用户测得的是包含各种误差影响在内的距离, 称之为伪距。
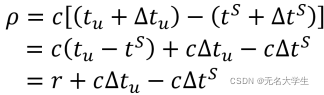 这是伪距
这是伪距
![]() 是用户机钟差,加上用户三维坐标,共四个未知量,所以需要至少同时看到四颗卫星才能实现定位。
是用户机钟差,加上用户三维坐标,共四个未知量,所以需要至少同时看到四颗卫星才能实现定位。
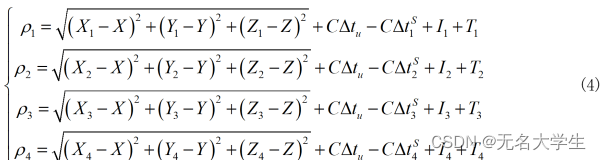
设用户坐标是(X,Y,Z),三颗卫星位置根据星历可得是已知量,设为(Xi,Yi,Zi)
则用户对第i个卫星的伪距为:
![]()
后面的一串是各种误差,比如电离层影响等等,这些都根据模型可提前求得,算作已知量。
写完整:
提前写明,最终求解这个四元方程的方法是 迭代法
因此对于(X,Y,Z)会需要一个初值,可以理解为近似值,但实际你随便取无影响,只会对迭代系数有一点点的影响。
我们把这个初值定为(X0,Y0,Z0),令
然后将一开始伪距的表达式泰勒一阶展开,这里是三元的泰勒展开,anyway只有套用三元的一阶展开公式就行
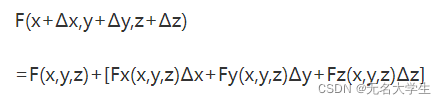 三元函数一阶泰勒展开公式
三元函数一阶泰勒展开公式
得到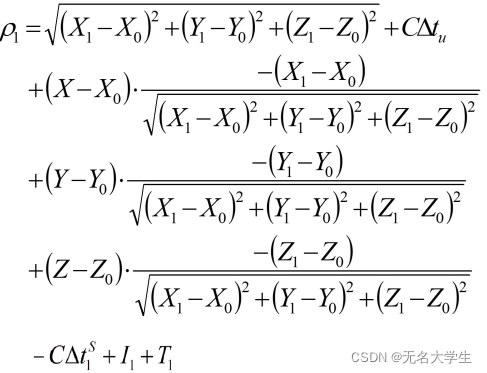 (5)(左图ΔX=X-X0带入了)
(5)(左图ΔX=X-X0带入了)
后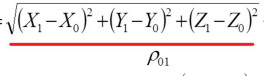 引入这个ρ01,类似到ρ04,带入(5)并求偏导
引入这个ρ01,类似到ρ04,带入(5)并求偏导
可得 ,再带入(5),(5)就可用偏导表示
,再带入(5),(5)就可用偏导表示 
完整版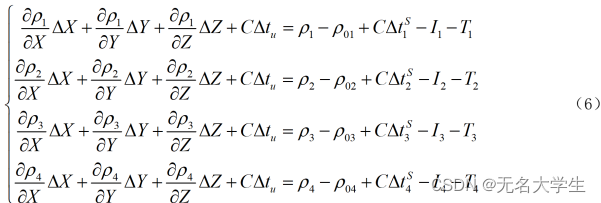
记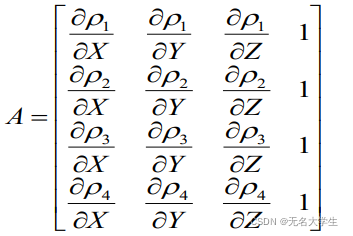 ,记
,记
(6)写成矩阵表示: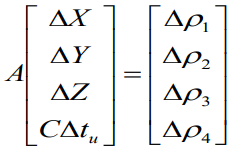 ,因此
,因此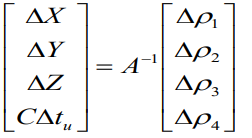
最终可解得ΔX,ΔY,ΔZ,CΔtu。通过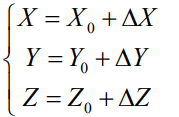 更新用户坐标
更新用户坐标
如果超过四颗卫星的信息,前面都一样,相当于方程数多于未知量个数,此时只需要在最后加上最小二乘法的处理就可以得到最优解了。
考虑到涉及到的矩阵运算比较多,所以选用MATLAB来计算
🍞正在为您运送作品详情 代码+介绍文档
文档中写的很清楚了,其实很简单
代码中选用了三组数据,最终得到的计算位置相同
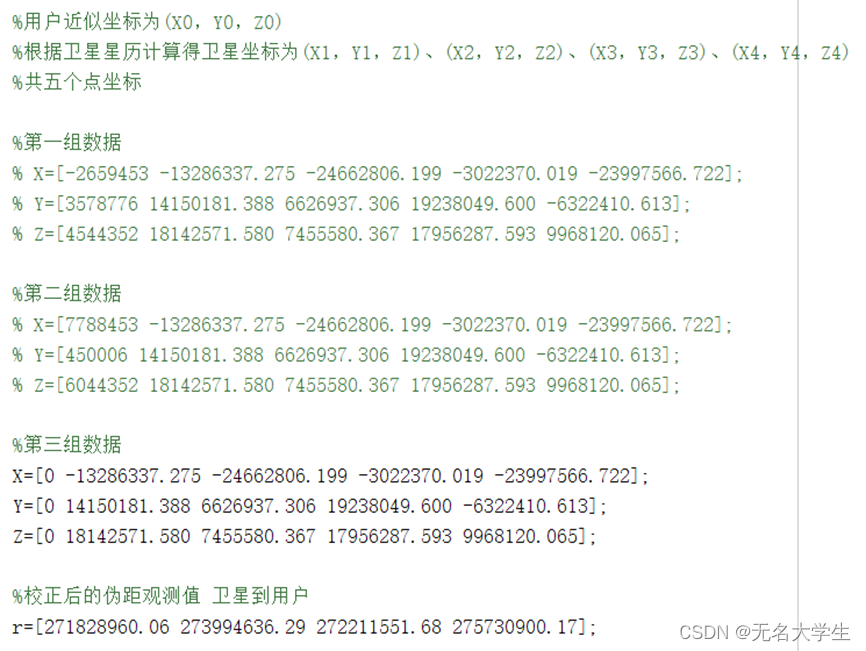
最终实验结论:
迭代次数和初始值的选定有关系,初始值准确则需要的迭代次数少。
但是总体的迭代的收敛速度非常快,不管初始值多少,通过几次迭代就可以趋向平稳。所以我想,即便一开始不知道用户的近似位置,通过伪码和卫星位置也可以很快通过迭代得到用户准确位置。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











