






1.添加秘钥
sudo apt install curl gnupg2 -y
curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -
- 设置软件源
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
- 安装ROS2
sudo apt update
若出现“无法验证下列签名: NO_PUBKEY XXX”
// 如无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
//ubuntu22安装humble
sudo apt install ros-humble-desktop
sudo apt install ros-dev-tools
//ubuntu20安装foxy
sudo apt install ros-foxy-desktop
- 安装自动补全工具
sudo apt install python3-argcomplete -y
- 设置环境变量
//ubuntu22 humble
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source .bashrc
//ubuntu20 foxy
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
source .bashrc
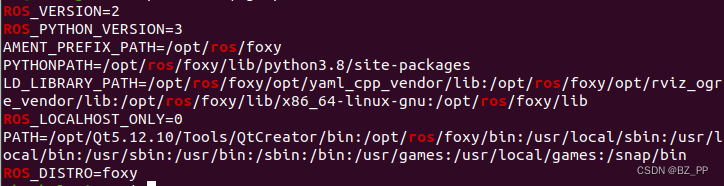
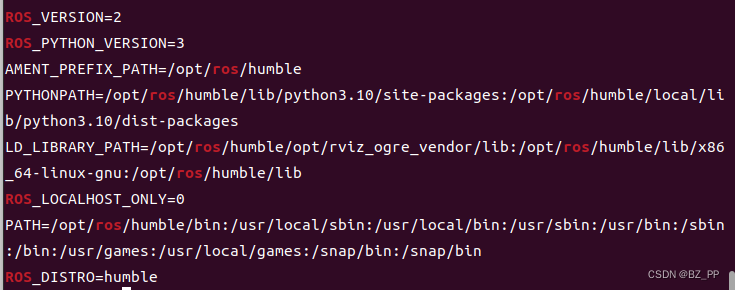
- 查看环境变量
printenv | grep -i ROS
ubuntu20 foxy
ubuntu22 humble
- 测试案例
重新打开两个终端分别运行
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_cpp listener
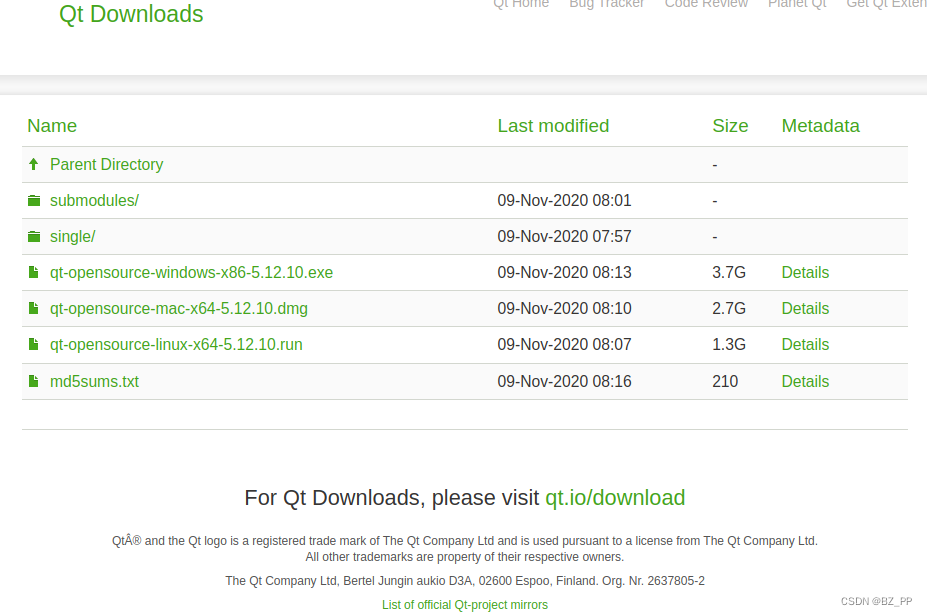
安装QT5.12.10
- ubuntu下载*******.run文件
qt5.12.10链接
- 断开网络连接!
- 切换到下载******.run的文件夹下
sudo chmod +x ******.run
sudo ./******.run
其中一步选择组件
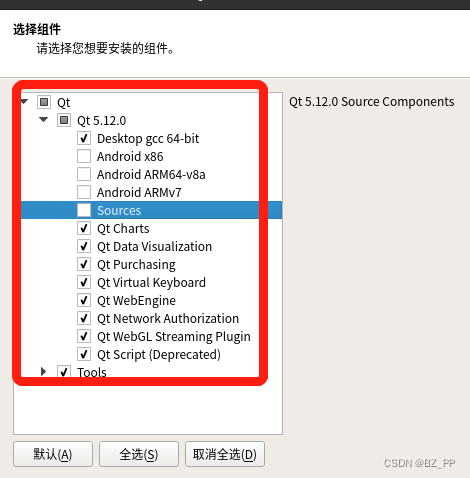
安装结束
4. 配置QT
连接网络
// 安装 g++
sudo apt-get install g++
// 安装 openGL 库
sudo apt-get install mesa-common-dev
//添加环境路径
gedit ~/.bashrc
//在文档末尾添加以下内容并保存
export PATH=/opt/Qt5.12.10/Tools/QtCreator/bin:$PATH
// 说明:/opt/Qt5.12.10/Tools/QtCreator/bin 比对自己的安装路径是否相同,鼠标依次点开文件夹或cd及ls 进行比对。
5.测试
echo $PATH

该记录只为方便自己使用
安装ROS2 foxy原文链接
安装QT
配置QT














 762
762











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









