






简介
梳理了以下NS方程推导的整个过程,包括流体本构方程的推导,最后面还介绍了NS方程常用的简化形式,并且用介绍了张量计算并推导了NS方程简化形式的由来。
这些手稿可以帮助大家理解流体力学中最基本的NS方程推导,并且能帮助大家看懂论文中常用的简化形式。后面有时间会扫描下公式,再发清晰的电子版,文中有不少书写错误,感谢大家指正。
下面的参考链接不错,我也是看了这几个才学明白的,大家可以参考着看一看
参考链接:
NS方程推导,用的是守恒形式,但作者没介绍本构方程:
https://www.bilibili.com/video/av667743364/?vd_source=cce81def12345097306598858597a9de
NS方程简化形式推导,介绍了张量表达方法,但感觉他对流项好像推导错了https://www.bilibili.com/video/BV1V3411t7Bx/?spm_id_from=333.788.recommend_more_video.1&vd_source=cce81def12345097306598858597a9de
本构方程推导:https://wenku.baidu.com/view/f5f45506783e0912a3162a45.html?_wkts_=1675253545444
张量介绍,包括张量表示法和运算方法以及梯度散度旋度:https://blog.csdn.net/weixin_43940314/article/details/123559800和https://zhuanlan.zhihu.com/p/136836187
手稿:
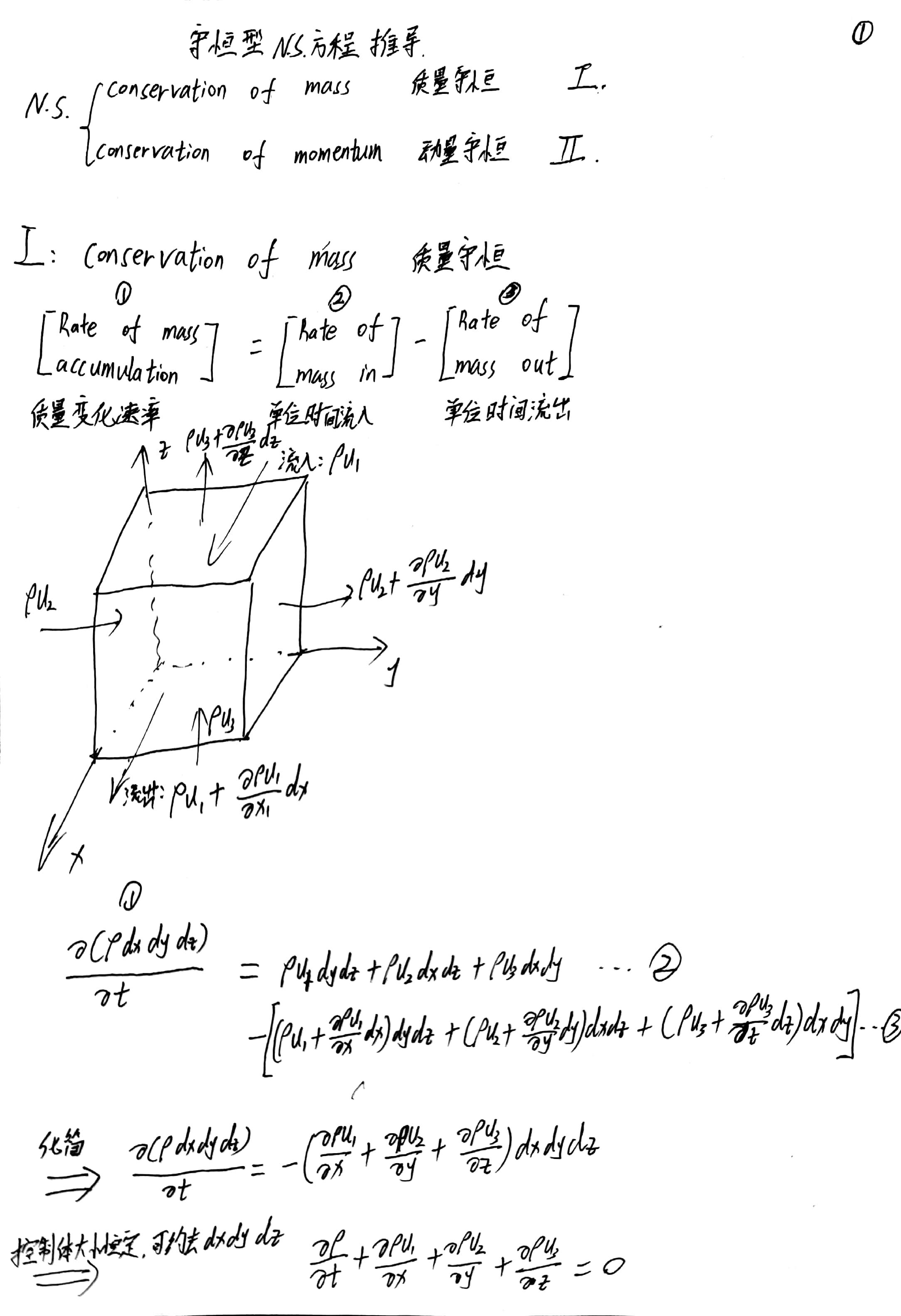
质量守恒方程
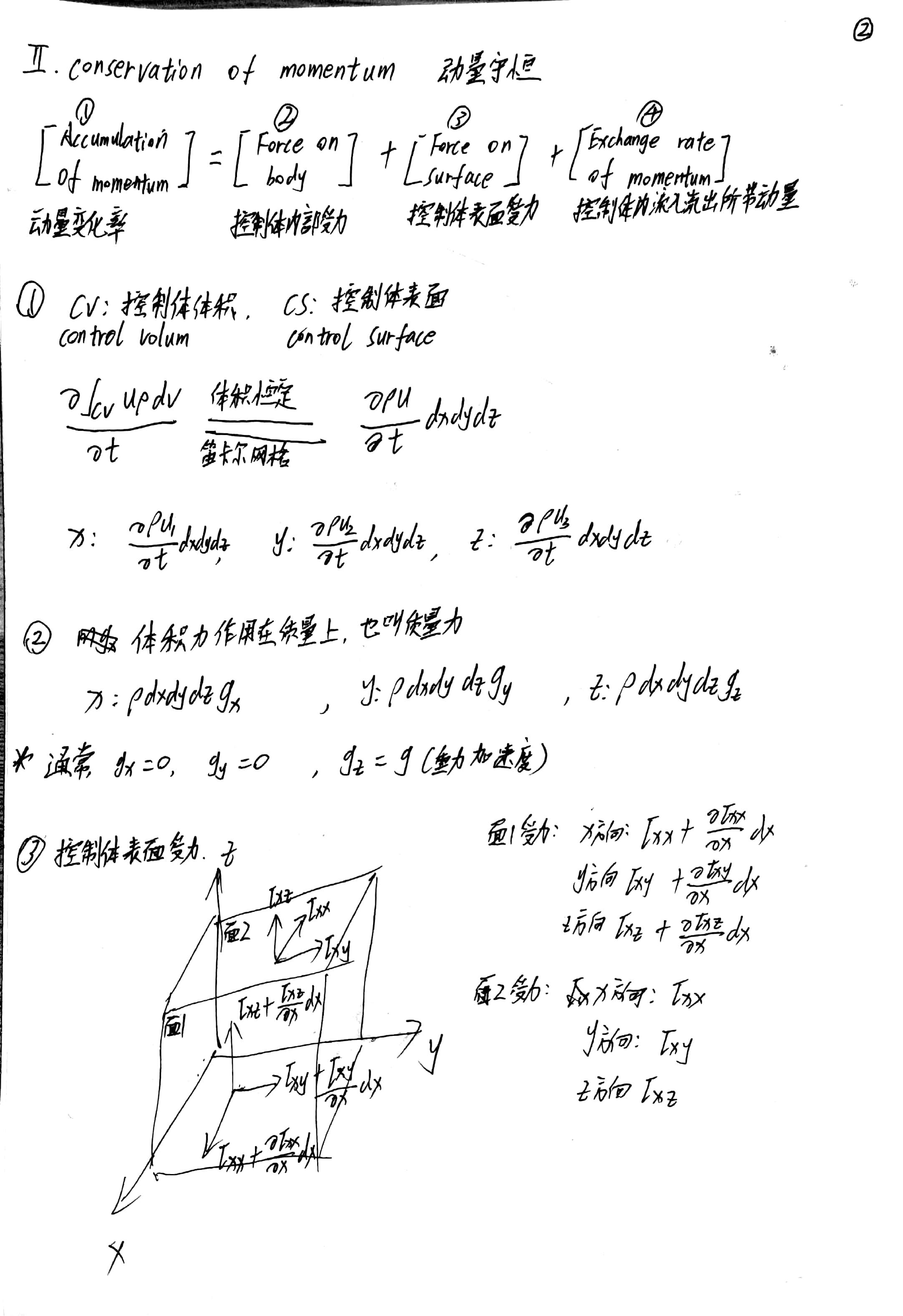
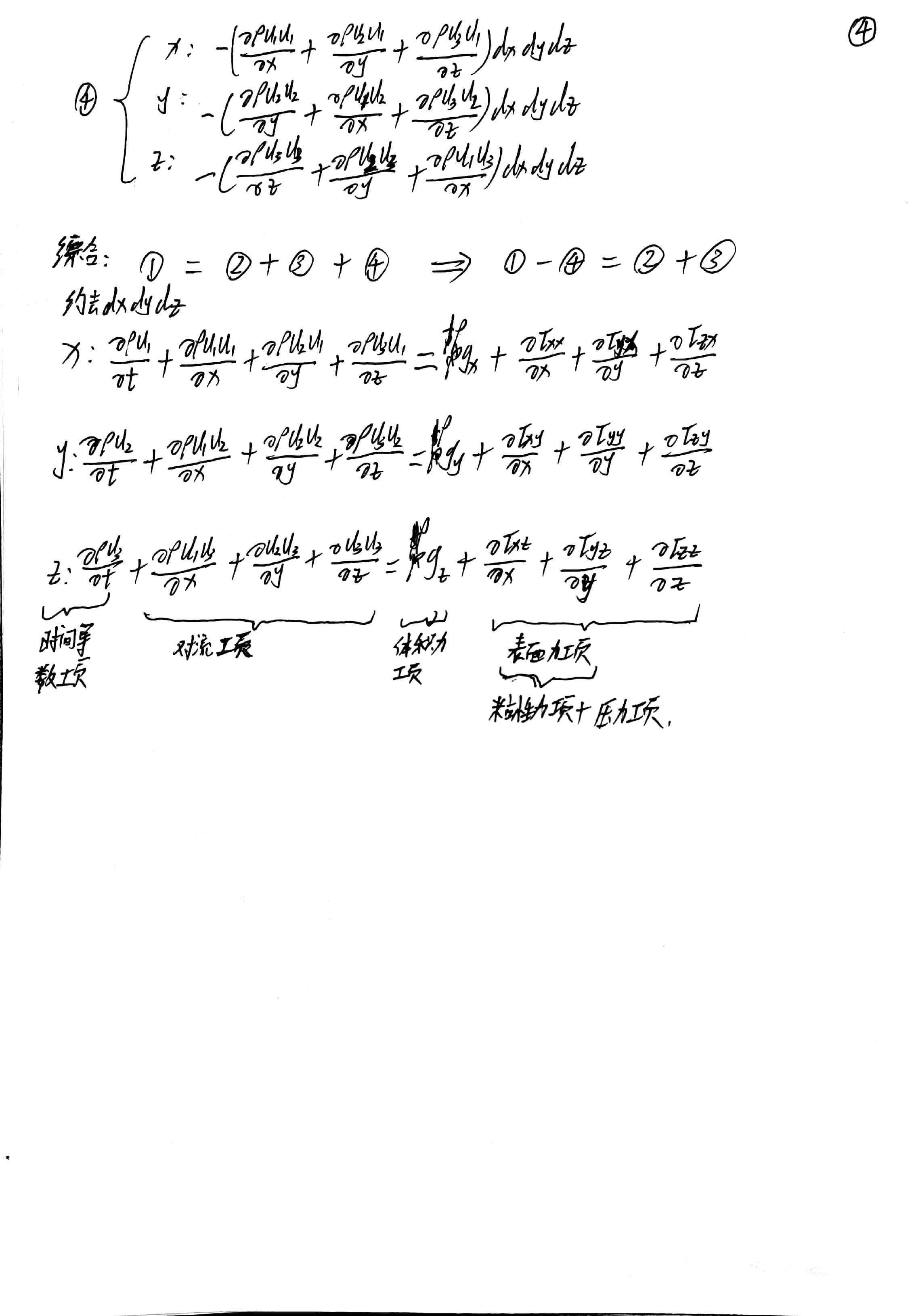
动量守恒方程,根据六面体受力去挨个分析
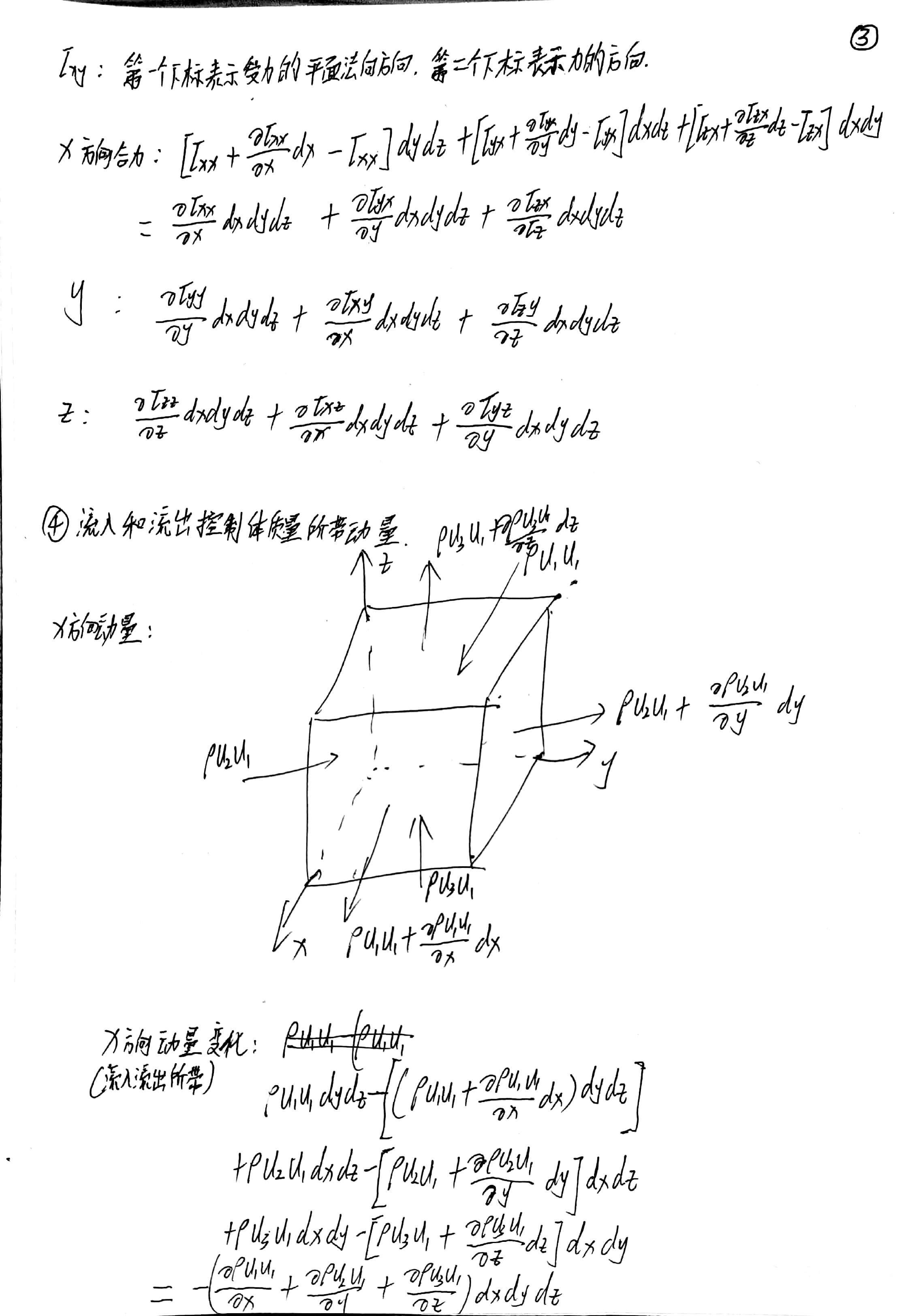
另一种积分形式的动量方程推导
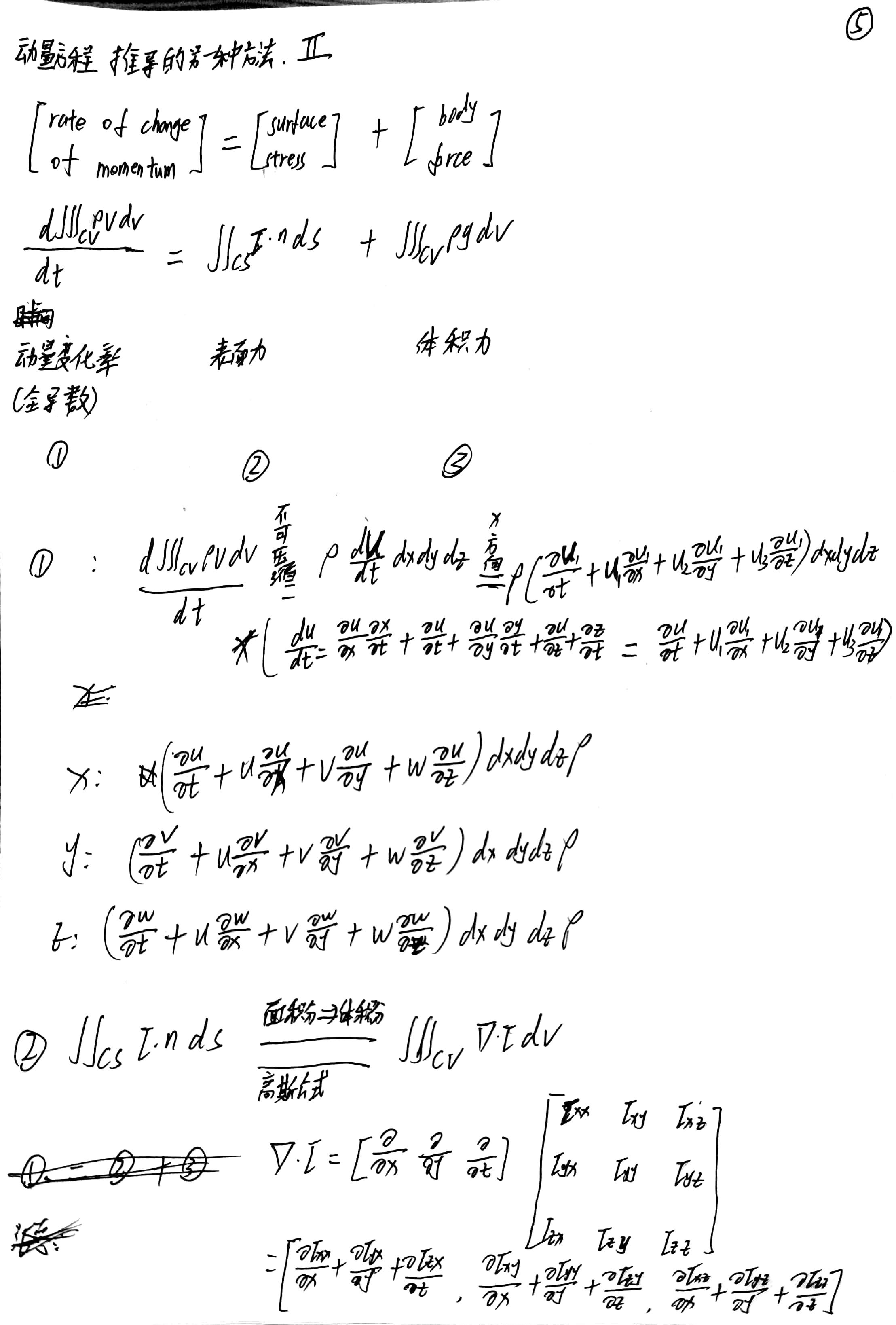

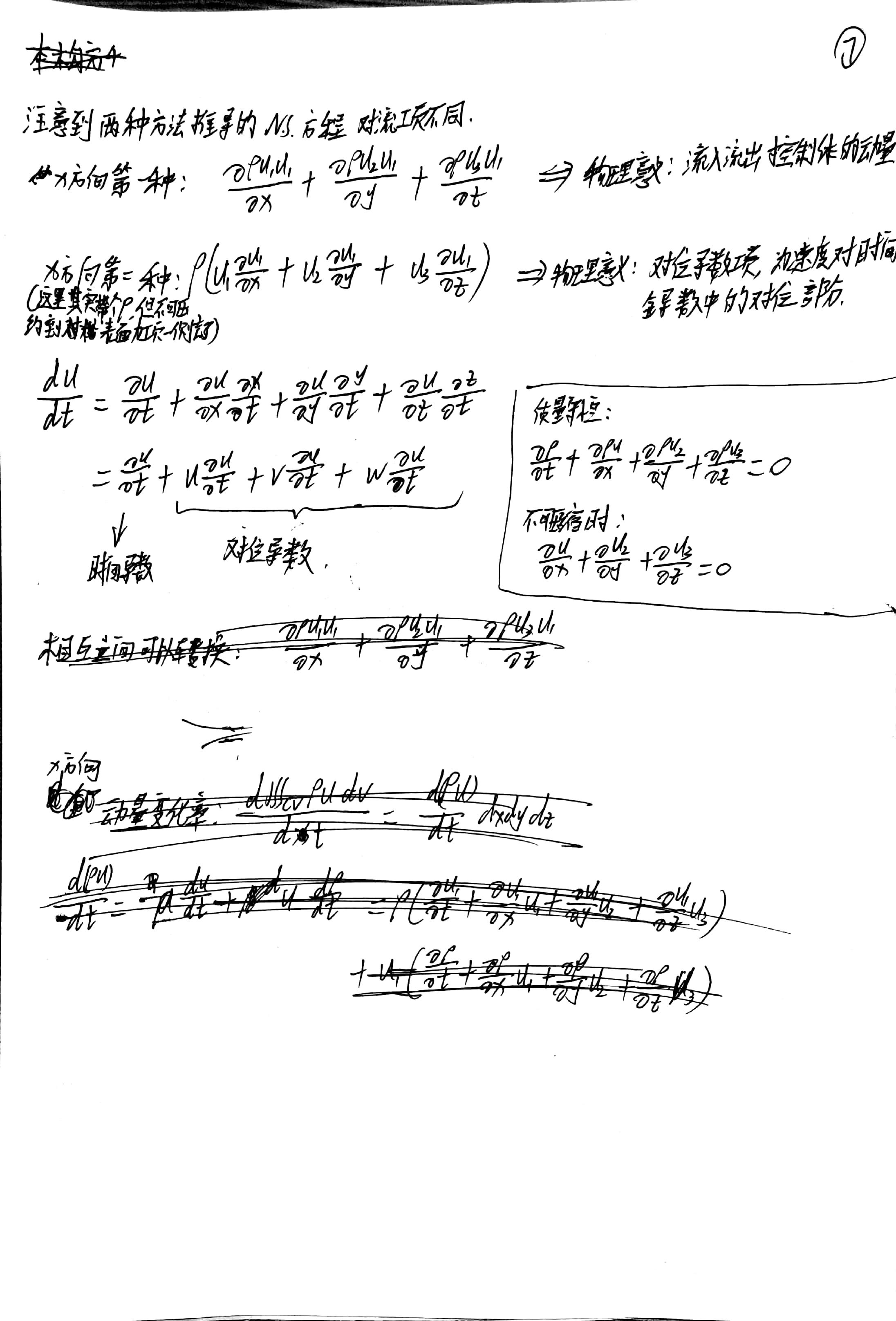
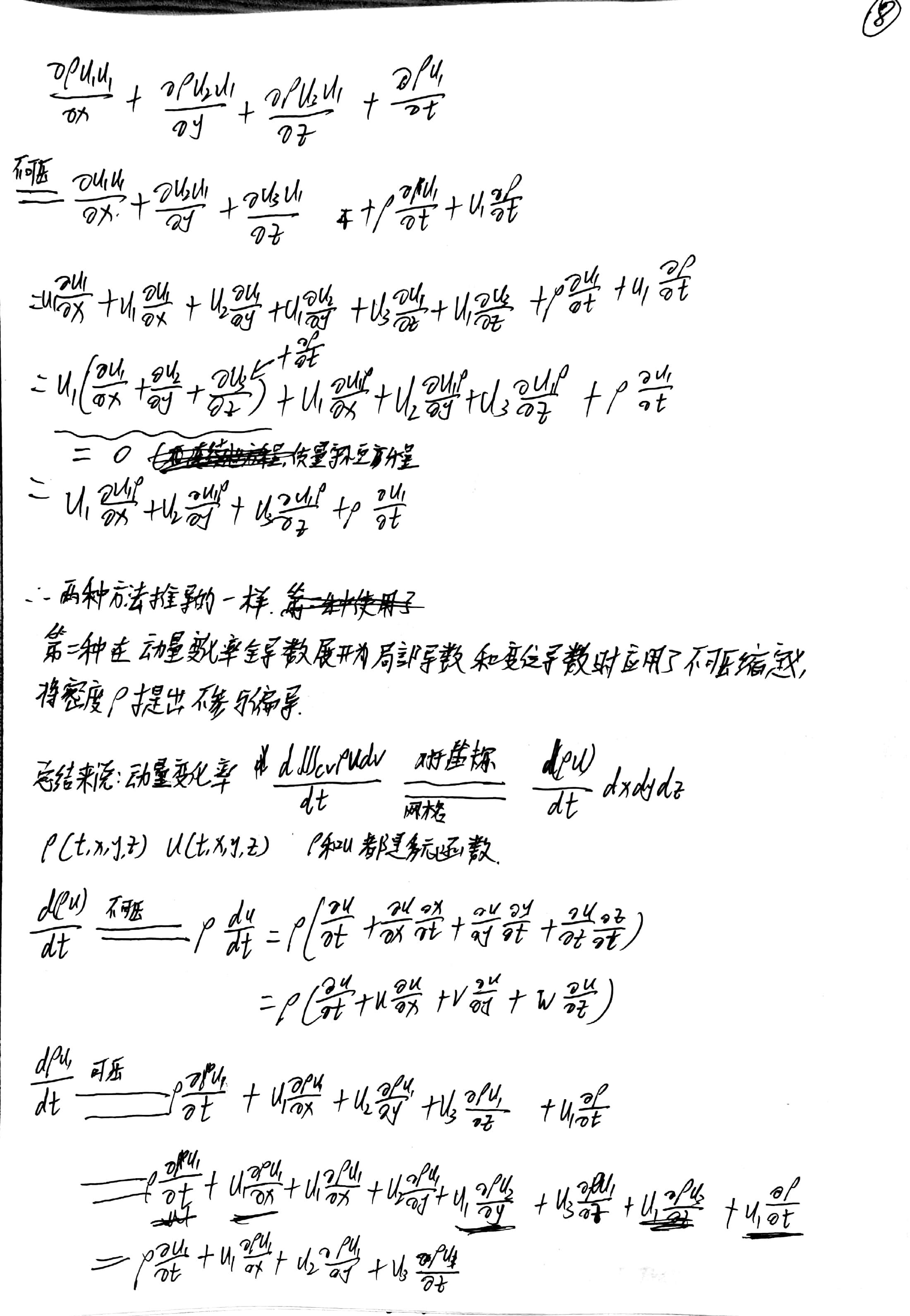
对流项的不同表达
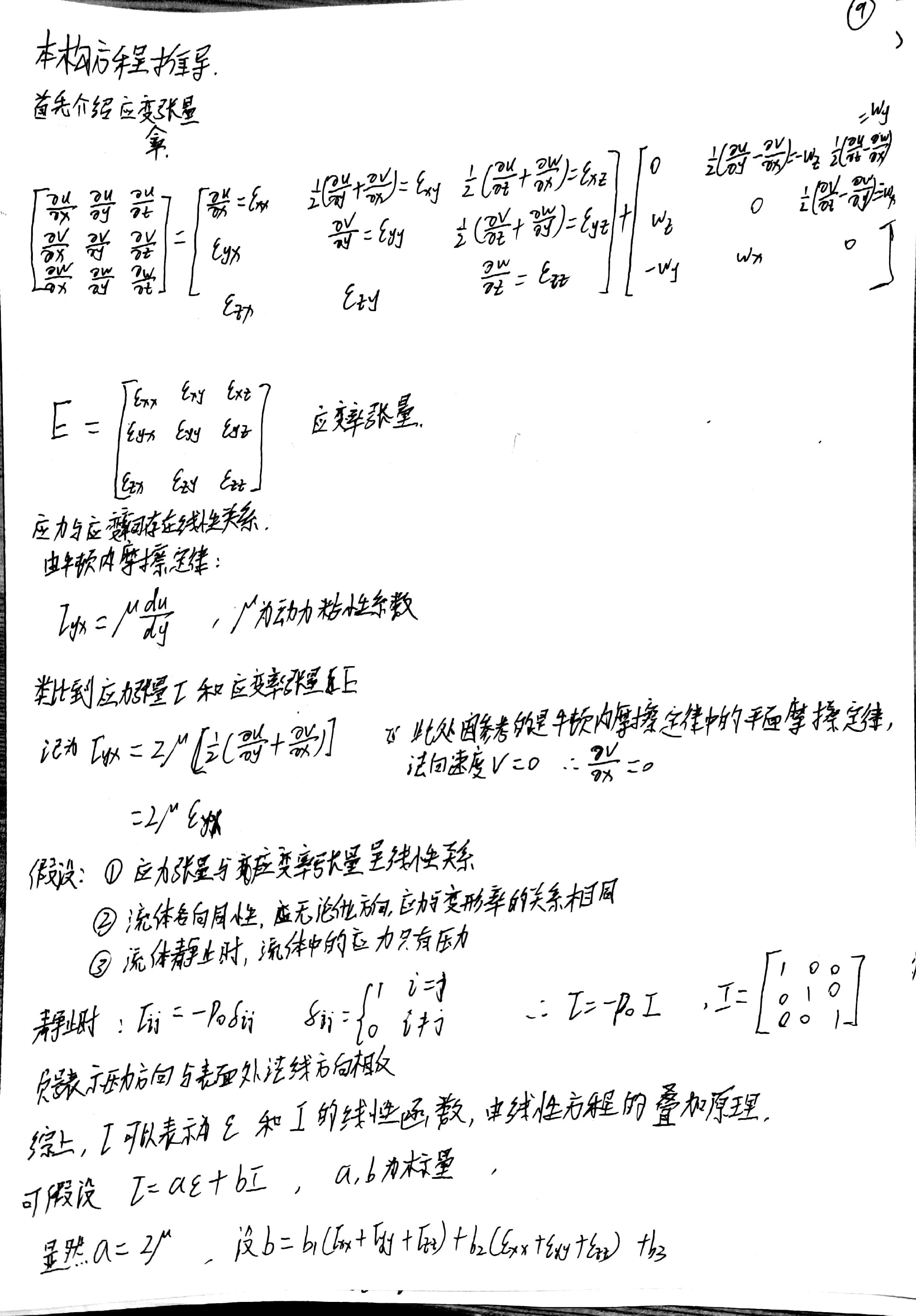
本构方程推导
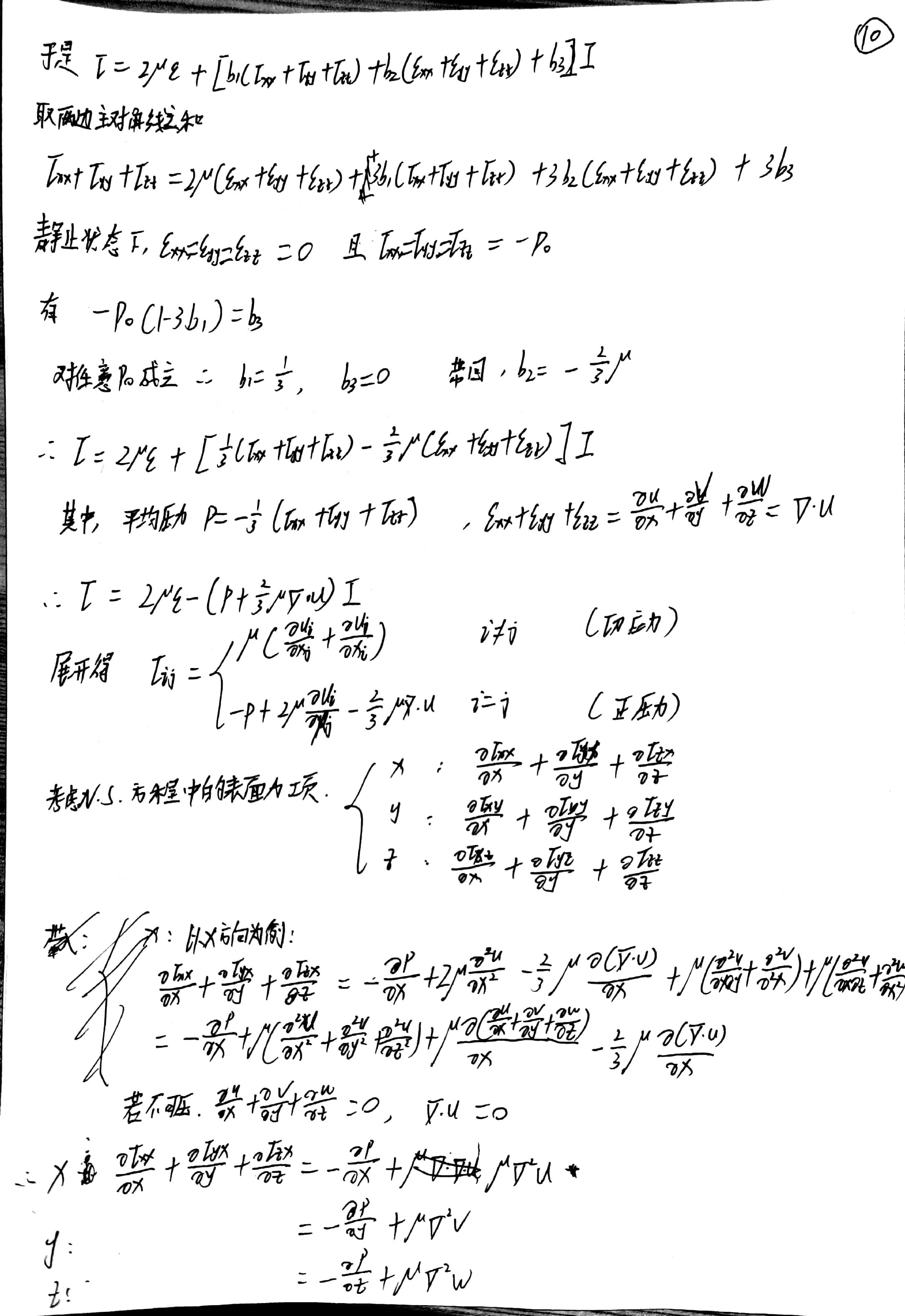
NS方程简化形式
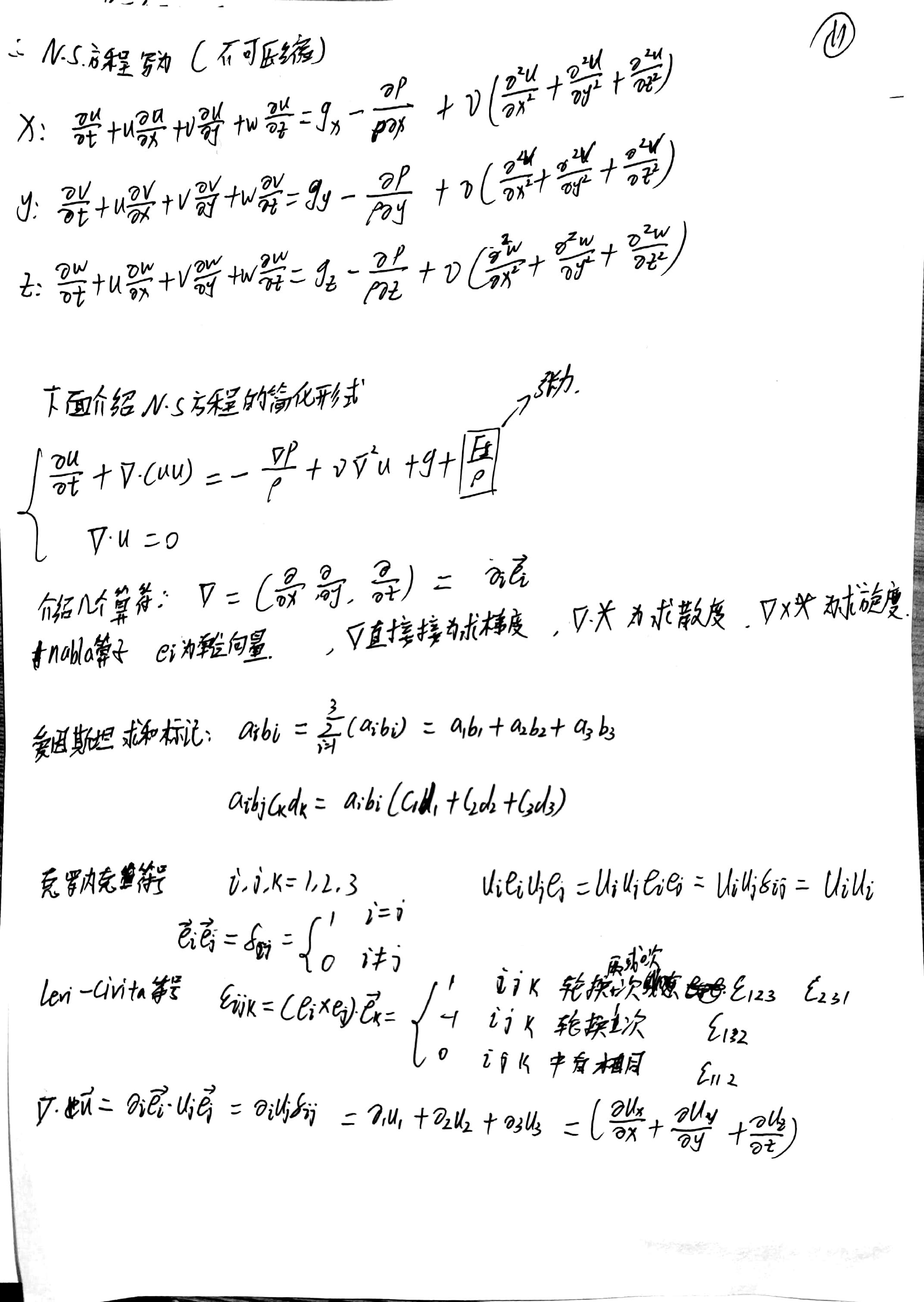


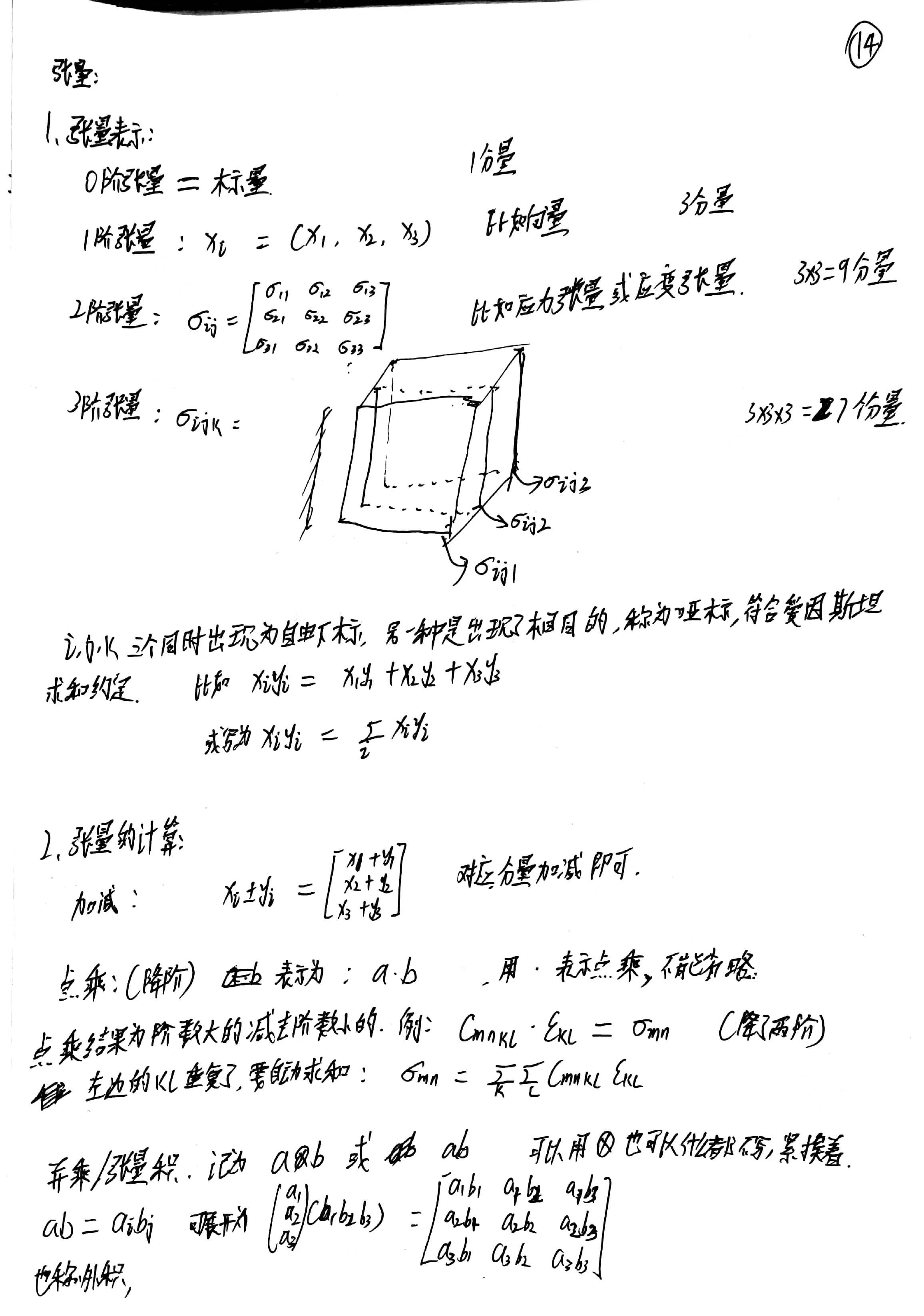
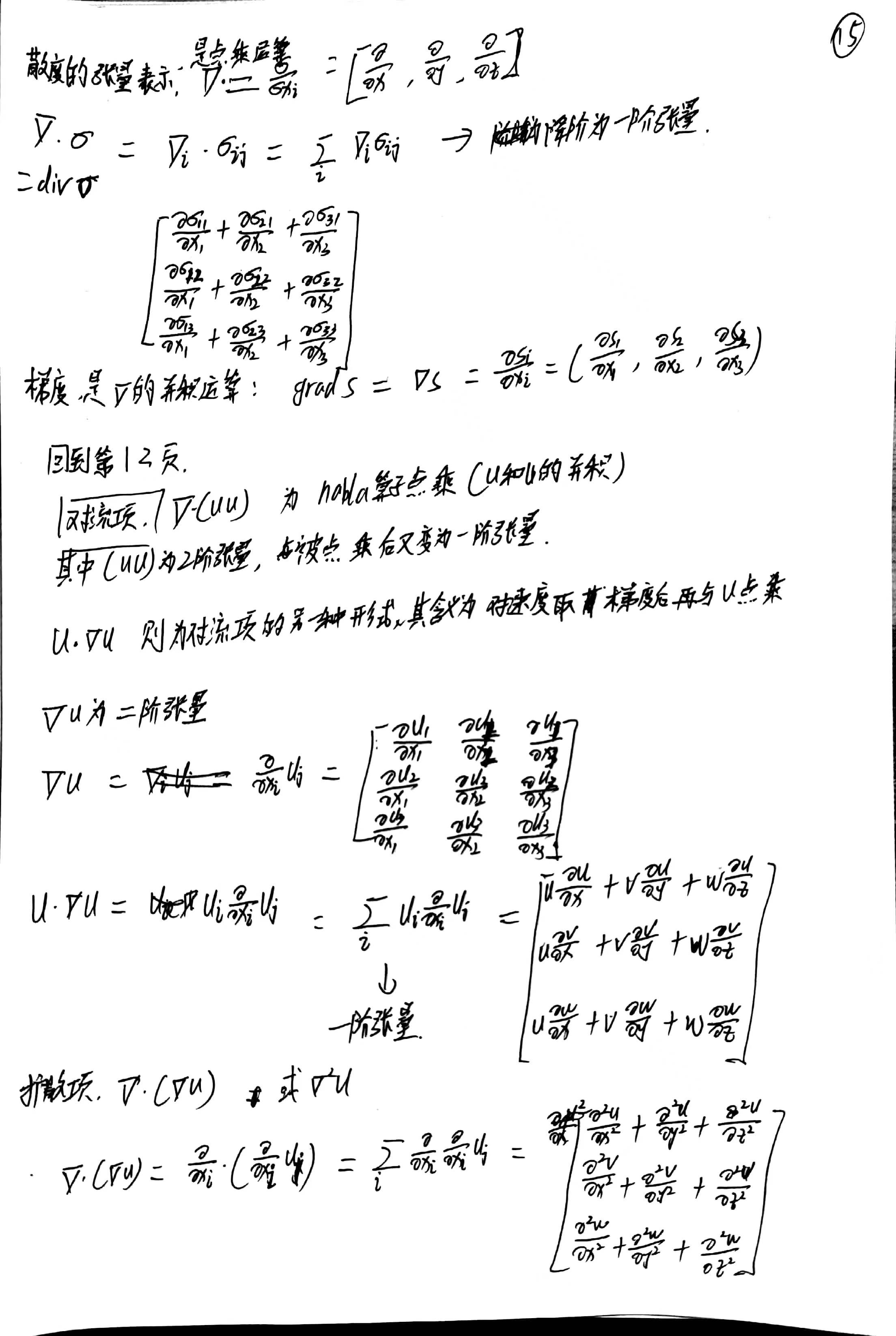
张量表示法介绍,推导简化形式


















 1202
1202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











