






基于强化学习 DDPG 算法实现的acc 自适应巡航控制器设计
配有说明文档
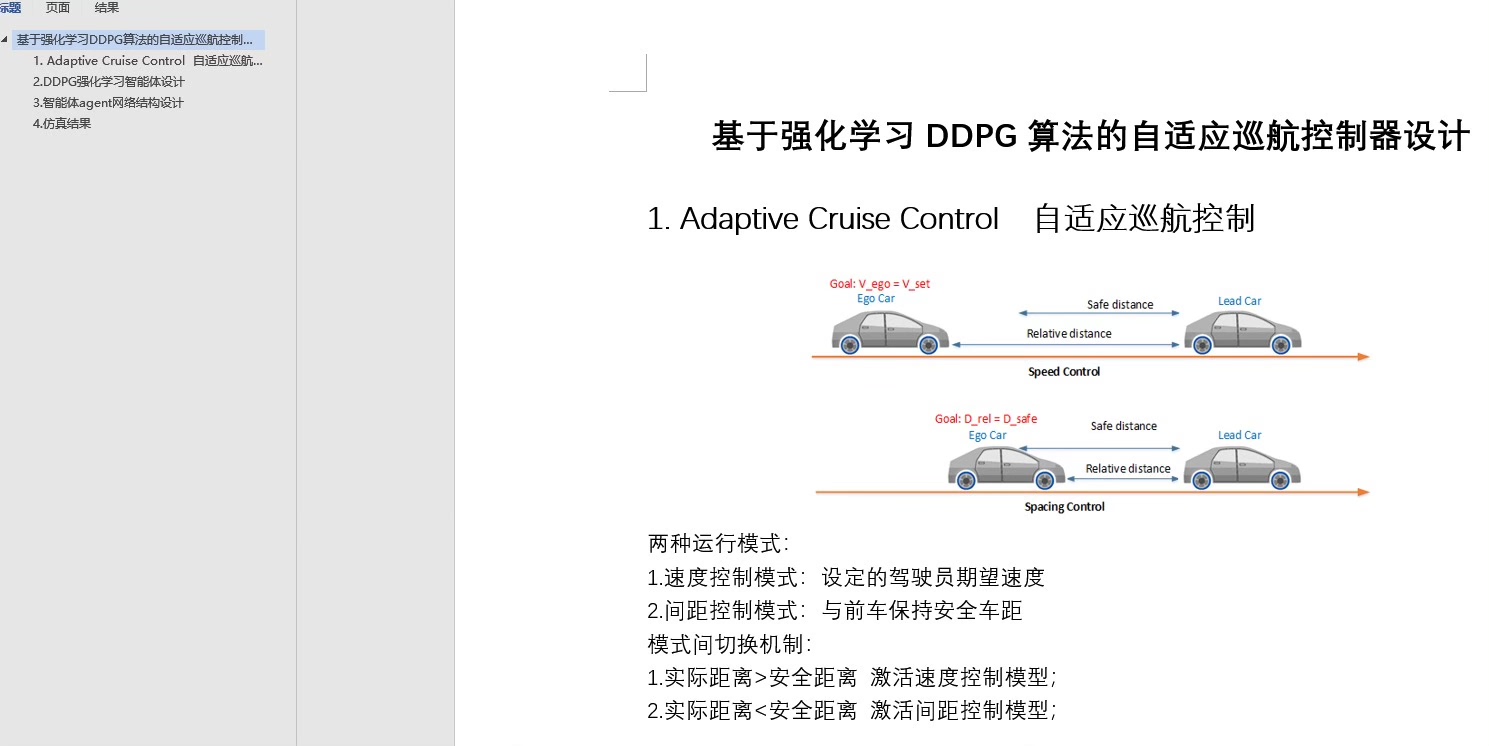
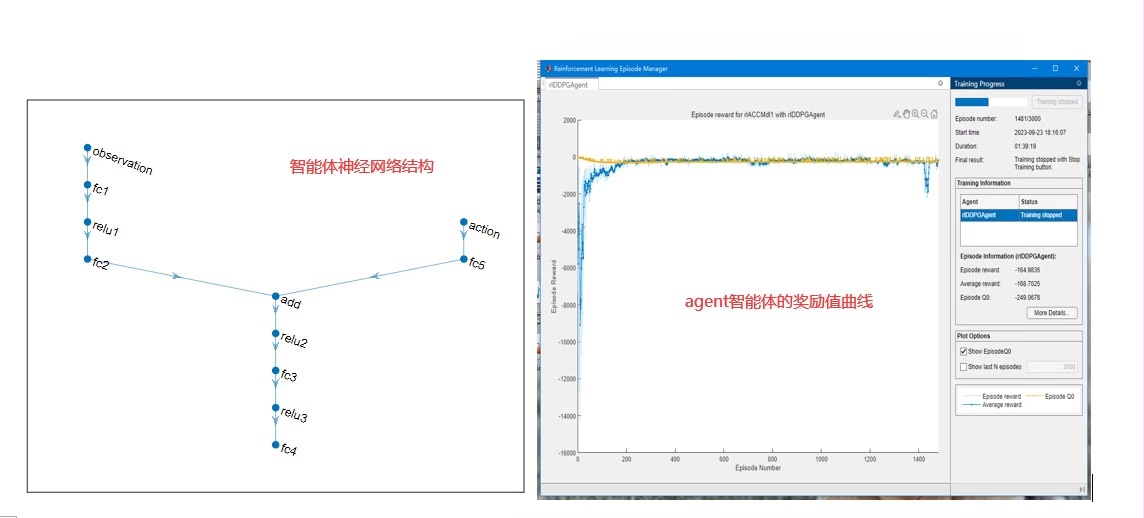
基于simulink 中的强化学习工具箱,设计agent 的奖励函数,动作空间,状态空间,训练终止条件
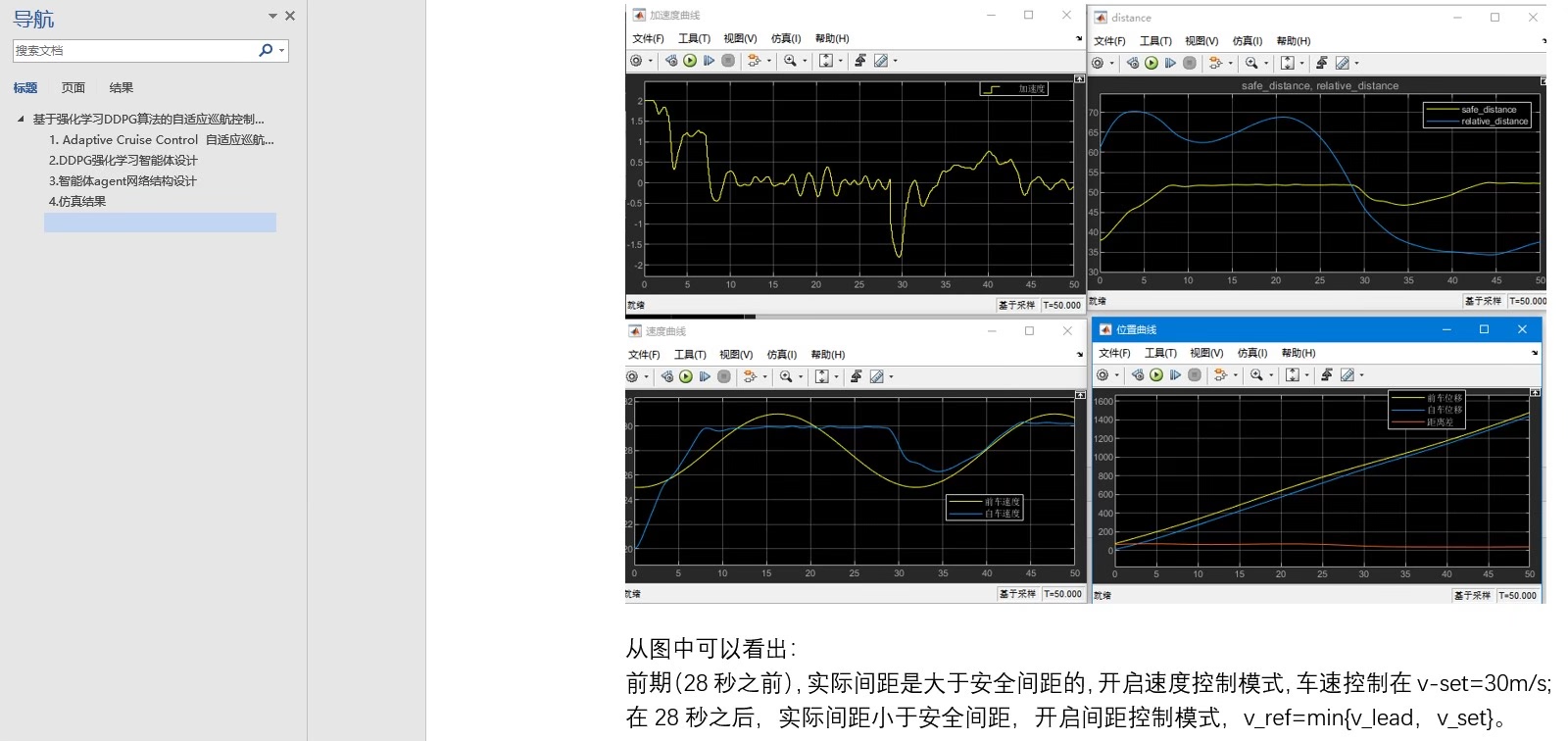
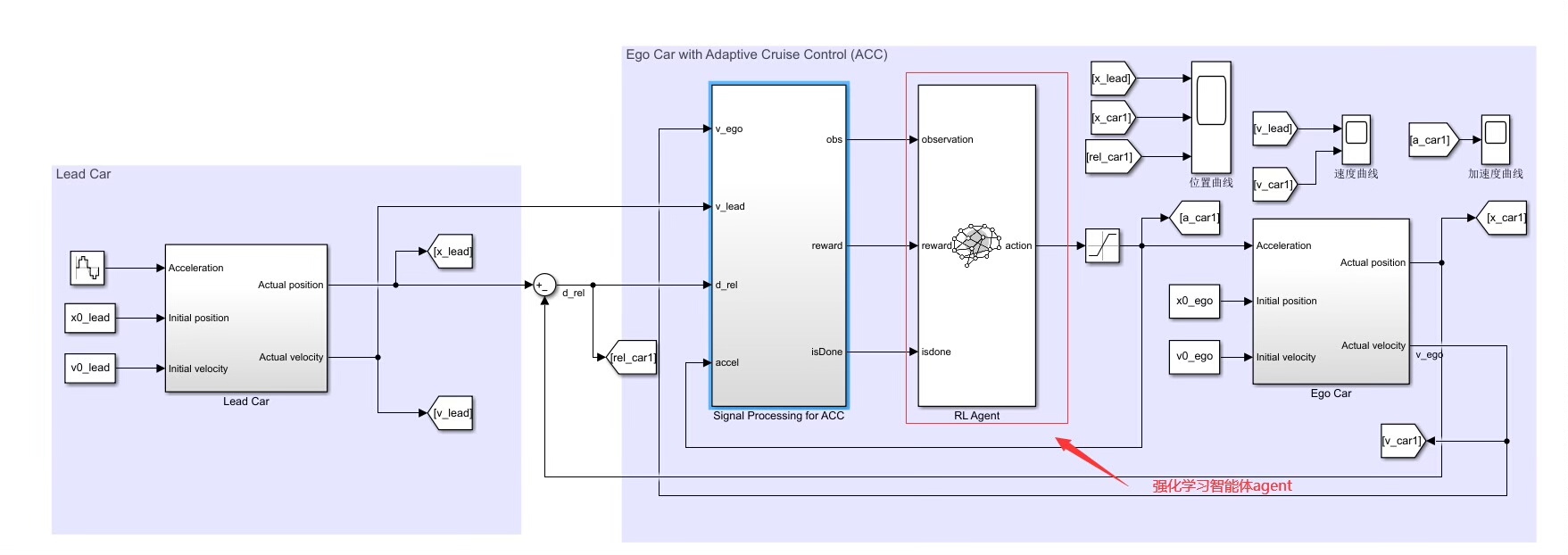
设置领航车的速度和位移曲线,然后自车的加速度基于 acc 逻辑用ddpg agent 来控制。
模型比较简单,适用于初学强化学习算法的入门资源,可改写成强化学习的车辆队列协同控制。
ID:1220740453377470
吕~小布

标题:基

基于强化学习 DDPG 算法实现的acc 自适应巡航控制器设计
配有说明文档
基于simulink 中的强化学习工具箱,设计agent 的奖励函数,动作空间,状态空间,训练终止条件
设置领航车的速度和位移曲线,然后自车的加速度基于 acc 逻辑用ddpg agent 来控制。
模型比较简单,适用于初学强化学习算法的入门资源,可改写成强化学习的车辆队列协同控制。
ID:1220740453377470
吕~小布
标题:基
 620
2272
997
620
2272
997

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















