







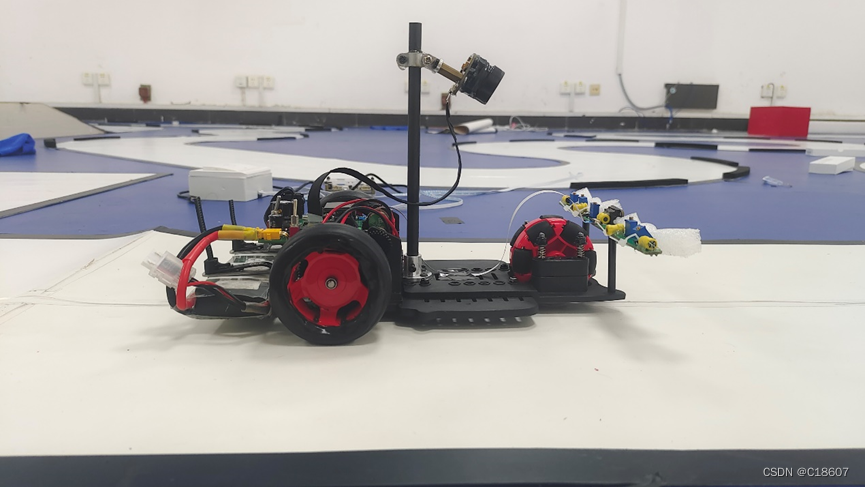
机械结构
在保持原有车模电机的底盘不变的基础上,将电池后置并尽可能贴近地面,使车模的重心后置,使得在弯道处能有更好的转向性能。
速度控制思路
数据处理
调用开源库中的编码器读取函数获取速度信息,将获取到的速度信息进行一阶互补滤波
Measure_Speedr_least=-encoder_get_count(TIM6_ENCOEDER);
encoder_clear_count(TIM6_ENCOEDER);
Measure_Speedz_least=encoder_get_count(TIM2_ENCOEDER);
encoder_clear_count(TIM2_ENCOEDER);
//编码器一阶滤波
Measure_Speedz *= 0.2;
Measure_Speedz += 0.8*Measure_Speedz_least;
Measure_Speedr *= 0.2;
Measure_Speedr += 0.8*Measure_Speedr_least;速度闭环
在速度控制使用了单闭环的思路,即将两轮的速度和作为控制量,从而能更好的控制车模的整体速度,在速度环上采用LADC自抗扰控制。
float r_LADRC = 100,//快速跟踪因子
h_LADRC = 0.002;//滤波因子,系统调用步长
float b0_LADRC = 250,//系统系数
wc_LADRC = 50,//delta为fal(e,alpha,delta)函数的线性区间宽度
w0_LADRC = 200;//扩张状态观测器反馈增益1
/**
* 函数说明 LADRC初始参考值
* WangShun于2022-07-03创建
*/
const float LADRC_Unit[5][5]=
{
{0.005,20,100,400,0.5},
{0.001,20,33,133,8},
{0.005,100,20,80,0.5},
{0.005,100,14,57,0.5},
{0.005,100,50,10,1}
};
/**
* 函数说明:LADRC初始化
* WangShun于2022-07-03创建
*/
void LADRC_Init(LADRC_NUM *LADRC_TYPE1)
{
LADRC_TYPE1->h= h_LADRC; //定时时间及时间步长
LADRC_TYPE1->r =r_LADRC; //跟踪速度参数
LADRC_TYPE1->wc=wc_LADRC; //观测器带宽
LADRC_TYPE1->w0=w0_LADRC; //状态误差反馈率带宽
LADRC_TYPE1->b0=b0_LADRC; //系统参数
}
/**
* 函数说明:LADRC缺省
* WangShun于2022-07-03创建
*/
void LADRC_REST(LADRC_NUM *LADRC_TYPE1)
{
LADRC_TYPE1->z1= 0; //定时时间及时间步长
LADRC_TYPE1->z2 =0; //跟踪速度参数
LADRC_TYPE1->z3=0; //观测器带宽
}
/**
* 函数名:void ADRC_TD(LADRC_NUM *LADRC_TYPE1,float Expect)
* 函数说明:LADRC跟踪微分部分
* @param[in] 入口参数,期望值Expect(v0)输出值v1,v2
* @par 修改日志
* WangShun于2022-05-28创建
*/
void LADRC_TD(LADRC_NUM *LADRC_TYPE1,float Expect)
{
float fh= -LADRC_TYPE1->r*LADRC_TYPE1->r*(LADRC_TYPE1->v1-Expect)-2*LADRC_TYPE1->r*LADRC_TYPE1->v2;
LADRC_TYPE1->v1+=LADRC_TYPE1->v2*LADRC_TYPE1->h;
LADRC_TYPE1->v2+=fh*LADRC_TYPE1->h;
}
/**
* 函数名:LADRC_ESO(LADRC_NUM *LADRC_TYPE1,float FeedBack)
* 函数说明:LADRC线性状态观测器
* @param[in]
* @par 修改日志
* WangShun于2022-07-03创建
*/
void LADRC_ESO(LADRC_NUM *LADRC_TYPE1,float FeedBack)
{
float Beita_01=3*LADRC_TYPE1->w0;
float Beita_02=3*LADRC_TYPE1->w0*LADRC_TYPE1->w0;
float Beita_03=LADRC_TYPE1->w0*LADRC_TYPE1->w0*LADRC_TYPE1->w0;
float e= LADRC_TYPE1->z1-FeedBack;
LADRC_TYPE1->z1+= (LADRC_TYPE1->z2 - Beita_01*e)*LADRC_TYPE1->h;
LADRC_TYPE1->z2+= (LADRC_TYPE1->z3 - Beita_02*e + LADRC_TYPE1->b0*LADRC_TYPE1->u)*LADRC_TYPE1->h;
LADRC_TYPE1->z3+=-Beita_03*e*LADRC_TYPE1->h;
}
int decelerate_max = 8000;
int increase_max = 4000;
/**
*@Brief LADRC_LSEF
*@Date 线性控制率
WangShun于2022-07-03创建
*/
void LADRC_LF(LADRC_NUM *LADRC_TYPE1)
{
float Kp=LADRC_TYPE1->wc*LADRC_TYPE1->wc;
float Kd=2*LADRC_TYPE1->wc;
/**
*@Brief 按自抗扰入门书上kd = 2wc
*@Before Kd=3*LADRC_TYPE1->wc;
*@Now Kd=2*LADRC_TYPE1->wc;
*@WangShun 2022-04-27 注释
*/
float e1=LADRC_TYPE1->v1-LADRC_TYPE1->z1;
float e2=LADRC_TYPE1->v2-LADRC_TYPE1->z2;
float u0=Kp*e1+Kd*e2;
LADRC_TYPE1->u=(u0-LADRC_TYPE1->z3)/LADRC_TYPE1->b0;
if(LADRC_TYPE1->u>increase_max)
LADRC_TYPE1->u=increase_max;
else if(LADRC_TYPE1->u<-decelerate_max)
LADRC_TYPE1->u=-decelerate_max;
}
/**
* LADRC控制函数 .
* 将其置于任务循环中即可
* @par 其它
* @par 修改日志
* @WangShun 2022-07-03 注释
*/
void LADRC_Loop(LADRC_NUM *LADRC_TYPE1,float Expect,float RealTimeOut)
{
float Expect_Value = Expect;
float Measure = RealTimeOut;
LADRC_TD(LADRC_TYPE1,Expect_Value);
LADRC_ESO(LADRC_TYPE1,Measure);
LADRC_LF(LADRC_TYPE1);
}
同时,为了在直线上获得更好的加速效果,在弯道上会获得更好的稳定性,在车模在弯道和直线分别使用不同的输出限幅
void Power_control()
{
if(Gearshift>=3)
{
increase_max = Speed_Control*100;
}
else
{
increase_max = 4000;
}
}转向控制
数据采集和处理
陀螺仪使用icm20602六轴陀螺仪
通过SPI通信协议获取车模的X,Y,Z轴的角速度以及加速度信息
Get_Angle();
get_gyro_z = (int32)(icm20602_gyro_z/16.4384+0.5f);转向闭环
经过多次调试后,我们发现传统pd闭环的稳定性较差,在面对不同的弯道的适应性不好。最后我们对PD参数进行了一维模糊,同时加入陀螺仪的z轴角速度作为抑制参数,进一步的提高了车模运行的稳定性
//模糊PID控制实现函数
int FuzzyPIDcontroller(float e_max, float e_min, float ec_max, float ec_min, float kp_max, float kp_min, float error, float error_c,float ki_max,float ki_min,float kd_max,float kd_min,float error_pre,float error_ppre)
{
qerror = Quantization(e_max, e_min, error); //将 误差 error 映射到论域中
//qerror_c = Quantization(ec_max, ec_min, error_c); //将误差变化 error_c 映射到论域中
Get_grad_membership(qerror); //计算误差 error 和误差变化 error_c 的隶属度
GetSumGrad(); //计算输出增量 △kp、△ki、△kd 的总隶属度
GetOUT(); // 计算输出增量 △kp、△ki、△kd 对应论域值
detail_kp = Inverse_quantization(kp_max, kp_min, qdetail_kp); //去模糊化得到增量 △kp
detail_ki = Inverse_quantization(ki_max, ki_min, qdetail_ki); //去模糊化得到增量 △ki
detail_kd = Inverse_quantization(kd_max, kd_min, qdetail_kd); //去模糊化得到增量 △kd
qdetail_kd = 0;
qdetail_ki = 0;
qdetail_kp = 0;
kp = kp + detail_kp; //得到最终的 kp 值
ki = ki + detail_ki; //得到最终的 ki 值
kd = kd + detail_kd; //得到最终的 kd 值
if (kp < 0)
kp = 0;
if (ki < 0)
ki = 0;
if (kd < 0)
kd = 0;
detail_kp = 0;
detail_ki = 0;
detail_kd = 0;
int output = kp*(error) + kd * (error - error_pre ); //计算最终的输出
return output;
}
///区间映射函数
float Quantization(float maximum,float minimum,float x)
{
float qvalues= 6.0 *(abs(x)-minimum)/(maximum - minimum)-3;
return qvalues;
}
//输入e与de/dt隶属度计算函数
void Get_grad_membership(float error)
{
if (error > e_membership_values[0] && error < e_membership_values[6])
{
for (int i = 0; i < num_area - 2; i++)
{
if (error >= e_membership_values[i] && error <= e_membership_values[i + 1])
{
e_gradmembership[0] = -(error - e_membership_values[i + 1]) / (e_membership_values[i + 1] - e_membership_values[i]);
e_gradmembership[1] = 1+(error - e_membership_values[i + 1]) / (e_membership_values[i + 1] - e_membership_values[i]);
e_grad_index[0] = i;
e_grad_index[1] = i + 1;
break;
}
}
}
else
{
if (error <= e_membership_values[0])
{
e_gradmembership[0] = 1;
e_gradmembership[1] = 0;
e_grad_index[0] = 0;
e_grad_index[1] = -1;
}
else if (error >= e_membership_values[6])
{
e_gradmembership[0] = 1;
e_gradmembership[1] = 0;
e_grad_index[0] = 6;
e_grad_index[1] = -1;
}
}
}
// 获取输出增量kp,ki,kd的总隶属度
void GetSumGrad()
{
int Kp_rule_list[7] = {-3,NM,NS,ZO,PS,PM,PB}; //kp规则表
int Ki_rule_list[7] = {PB,PM,PS,ZO,NS,NM,-3}; //ki规则表
int Kd_rule_list[7] = {PB,PM,PS,ZO,NS,NM,-3}; //kd规则表
// 初始化 Kp、Ki、Kd 总的隶属度值为 0
for (int i = 0; i <= num_area - 1; i++)
{
KpgradSums[i] = 0;
KigradSums[i] = 0;
KdgradSums[i] = 0;
}
for (int i = 0; i < 2; i++)
{
if (e_grad_index[i] == -1)
{
continue;
}
int indexKp = Kp_rule_list[e_grad_index[i]] + 3;
int indexKi = Ki_rule_list[e_grad_index[i]] + 3;
int indexKd = Kd_rule_list[e_grad_index[i]] + 3;
KpgradSums[indexKp] = e_gradmembership[i];
KigradSums[indexKi] = e_gradmembership[i];
KdgradSums[indexKd] = e_gradmembership[i];
}
}
// 计算输出增量kp,kd,ki对应论域值
void GetOUT()
{
for (int i = 0; i < num_area - 1; i++)
{
qdetail_kp += kp_menbership_values[i] * KpgradSums[i];
qdetail_ki += ki_menbership_values[i] * KigradSums[i];
qdetail_kd += kd_menbership_values[i] * KdgradSums[i];
}
}
//反区间映射函数
float Inverse_quantization(float maximum, float minimum, float qvalues)
{
float x = (maximum - minimum) *(qvalues + 3)/6 + minimum;
return x;
}
int Rotary_compensate;
int Garge_compensate;
int Garge_compensate_ki;
extern int trackStage;
int Fuzzy_Turning_PID(float actual, float set)
{
error_Turning = set - actual;
error_c_Turning = error_Turning - error_pre_Turning;
FuzzyPID(); //初始化PID参数
err_Turning = FuzzyPID_Gyro_controller(e_max_Turning, e_min_Turning, ec_max_Turning, ec_min_Turning, kp_max_Turning*10, kp_min_Turning*10, error_Turning, error_c_Turning, ki_max_Turning*10, ki_min_Turning*10, kd_max_Turning*10, kd_min_Turning*10,error_pre_Turning , error_ppre_Turning); //模糊PID控制实现函数
error_pre_Turning = error_Turning;
error_ppre_Turning = error_pre_Turning;
Fuzzy_Turning_Pwm = err_Turning;
return Fuzzy_Turning_Pwm;
}因为转向控制中没用使用I这一项参数,所以我们将i参数替换为陀螺仪z轴角速度的抑制系数,同时对I参量也进行一维模糊。
在模糊规则中模糊表PI参数的模糊表的选择尤为重要,我们将PI参数和摄像头获取的偏差联系起来,P参数的大小与偏差成正比关系,I参数的大小与偏差成反比关系,即摄像头偏差越大,P参数越大,I参数越小,即在转弯时削弱陀螺仪的抑制作用,以获得更快速的弯道响应速度。
转向环和速度环
得到转向环和速度环的数据后,我们将两个环的参数相加作为电机的PWM输出。经过调试,并级控制的响应速度快,同时降低了调参的难度。
但是并级控制由于直接将转向环输出直接用于电机控制,这就使电池电压的稳定性对小车运行的稳定性影响极大。在不同的电池电压下,车模的运行状态会截然不同,为了解决这一问题,我们在电路中加入了电池电压检测电路,根据电池电压对电机输出的PWM参数进行归一化处理,从而保证小车能够在不同电池电压下稳定运行。
LADRC_Loop(&Motor_LADRC,Target_Speed,Measure_speed);
Normalization_Left_Pwm = Battery_normalization(Motor_LADRC.u-Turn_pwm);
Normalization_Right_Pwm = Battery_normalization(Motor_LADRC.u+Turn_pwm);
Speed_Set(Normalization_Left_Pwm,Normalization_Right_Pwm);void Voltage_Init()
{
adc_init(VOLTAGE_PIN,ADC_12BIT);
int i,j;
//连续采多次,填满缓冲区
for(i=0;i<=VOLTAGE_BUFFER_SIZE-1;i++)
{
Voltage_Buffer[i]=adc_mean_filter_convert(VOLTAGE_PIN, 4);
}
unsigned short temp=0;
//先对电感数据缓存做一个排序
for(i=0;i<=VOLTAGE_BUFFER_SIZE-1-1;i++)
{
for(j=i+1;j<VOLTAGE_BUFFER_SIZE;j++)
{
if(Voltage_Buffer[i]>Voltage_Buffer[j])
{
temp=Voltage_Buffer[i];
Voltage_Buffer[i]=Voltage_Buffer[j];
Voltage_Buffer[j]=temp;
}
}
}
//取中位数
temp=VOLTAGE_BUFFER_SIZE/2;
Voltage_ADC=Voltage_Buffer[temp];
Voltage = (float)((Voltage_ADC*3.3)/4096)*6;
if(Voltage<8.4)
{
Low_Battery = 1;
}
else
{
Low_Battery = 0;
}
SPEED_MAX = 10000*(10.4/Voltage);
if(SPEED_MAX>10000)
{
SPEED_MAX = 10000;
}
}
int Battery_normalization(int PWM)
{
int normalization_pwm;
normalization_pwm = PWM * 12.0f/Voltage;
return normalization_pwm;
}















 2143
2143











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









