










车控快讯(文/每日一CHEK)感知-决策-控制,感知的安全有效是NGP、LCCL、AEB等智能驾驶功能安全性的前提。为此,使用激光雷达+毫米波+摄像头的多传感器融合感知方案,获得充分冗余的感知能力,以保证感知信息安全可靠。

激光雷达、摄像头与毫米波雷达的成像对比
- 摄像头色彩信息丰富,受环境光的影响大,面对强光照射、高亮反白物体容易过曝、“亮瞎眼”,而在夜晚弱光环境则会“眼前一片黑”,BEV可以通过深度学习让摄像头2D信息转换3D信息,但依旧无法克服上述环境光照导致的失效问题。BEV、占据栅格网等技术无法有效将未知障碍物准确转换到三维空间,且测距不准确的问题依然存在。视觉算法虽然能检出常规障碍物,但是对运动障碍物的运动方向检测不稳定。
- 激光雷达主动发射激光探测,实时采集高精度三维空间数据信息,不受环境光的影响,白天和晚上都能照常工作,成像分辨率像素级(角分辨率0.1°~0.2°),测距精度厘米级。视觉的难点,恰恰是激光雷达的长处,物理层面,激光雷达白天和晚上都能照常工作,保证感知信息的持续有效,精准度与检出率方面,激光雷达直接探测环境障碍物形状大小,无需特征比对,未知类型障碍物依然有效检出,且障碍物边界刻画清晰与行驶轨迹预判准确。
- 毫米波雷达穿透能力强,且具备测速功能,但成像分辨率低,且在检测非金属材质静止物体方面存在局限性,对行人等检测不准确,新型4D毫米波雷达在分辨率上有所提升,但是与激光雷达相比依然相去甚远(4D毫米波雷达角分辨率1°~5°,激光雷达角分辨率0.1°~0.2°,相差10倍以上),所以说是4D毫米波无法替代激光雷达,但可以替代传统3D毫米波雷达。(比如,飞凡汽车在R7和F7上,同时使用摄像头、激光雷达、4D毫米波雷达融合,抛弃了传统3D毫米波雷达。)
- 学术研究数据:参考全球权威的自动驾驶3D目标感知学术竞技场 nuScenes detection task排行榜:
- 成绩最好的前16名均采用激光雷达+视觉融合方案,前77名方案均包含激光雷达,纯视觉方案最好的排名为第78名;
- 成绩最好的纯激光雷达方案感知能力表现(mAP:0.705)比成绩最好的纯视觉方案感知能力表现(mAP:0.624)高出12%以上;
- 成绩最好激光雷达与视觉融合方案感知能力表现(mAP:0.757)比成绩最好的视觉与毫米波雷达融合方案感知能力表现(mAP:0.575)高出24%以上。

来源:https://www.nuscenes.org/object-detection?externalData=all&mapData=all&modalities=Any
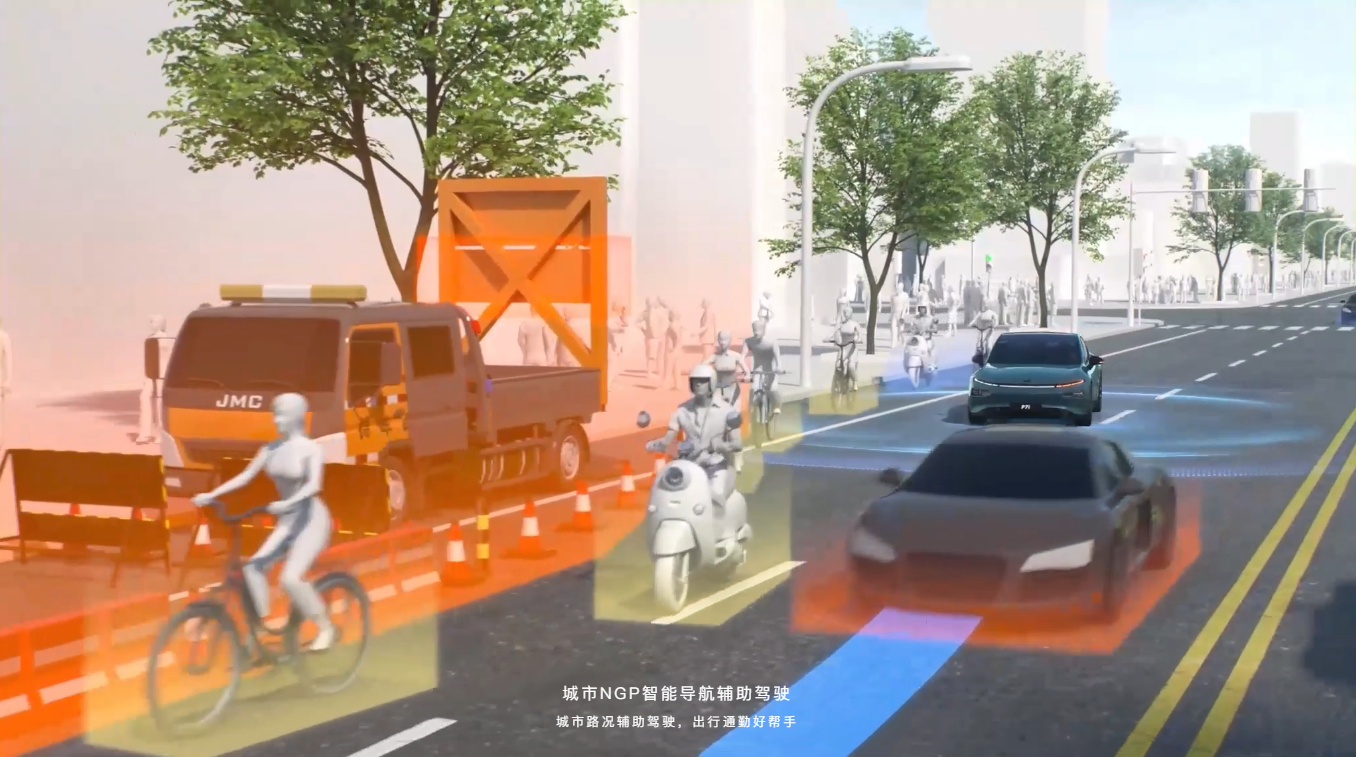
激光雷达在应用场景中对智能驾驶安全性与体验性的提升
体现到智能驾驶的应用场景中,激光雷达将大幅提升智能驾驶的安全性和舒适性。
安全性方面,激光雷达保障对未知障碍物、异型车辆、开门车辆等物体的有效检测,保障黑夜或强光照场景障碍物检查,避免智能驾驶因摄像头漏检而导致的碰撞事故。
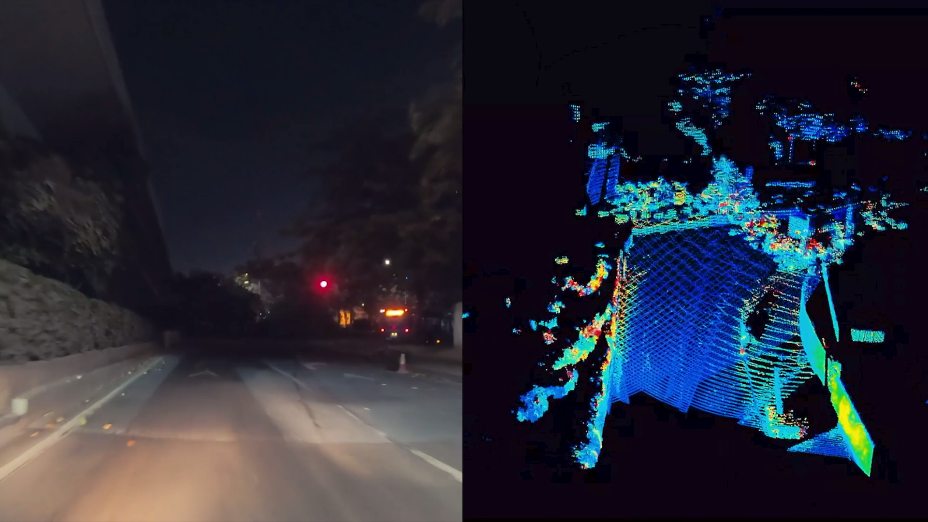
夜间驾驶,摄像头与激光雷达感知对比
舒适性方面,视觉算法运动障碍物的运动方向检测不稳定,可能将直行车辆识别为变道转向车辆,或者将转向变道车辆识别为直行车辆,在加塞博弈中,这将导致对相邻车辆意图的误判,体现驾驶行为上,要么是过分保守让路、要么激进跟车;而在高速上,与邻车并行时,这会导致刹车急停或点刹顿挫。相比之下,激光雷达可以直接检出车辆姿态指向和运动方向,给出稳定的检测信息,让智能驾驶能够准确占位或友好避让。实车体验中,搭载RoboSense双激光雷达的小鹏P7i,其XNGP系统在复杂拥堵路段中,对多车博弈表现出色,甚至在混合小电驴穿插的情景也能准确作出响应。类似的,在无保护左转和掉头场景中,激光雷达同样可以大幅提升智能驾驶的舒适性。

视觉感知,图中中间车辆识别框指向与行车方向明显偏离

激光雷达感知,所有车辆识别框行驶方向指向检测准确
视觉算法对障碍物的检测的精度低,障碍物边界刻画模糊,是导致智能驾驶舒适性不足的另一大原因,当遇到大卡车等大型车辆紧贴车道线行驶的场景,摄像头算法难以判断大卡车是否跨车道行驶,进而导致不恰当的点刹或变道,严重降低智能驾驶的舒适性,另外距离检测依据是视觉算法的短板,比如对于100米处障碍物,视觉算法可能给出车80米或120米的感知结果。而激光雷达通过激光直接测量,精准描绘障碍物的边界与相对距离,测距精度达到厘米级,对于前后左右车辆及其他障碍物的距离判断精准,帮助智能驾驶果断执行变道并线、汇入车流、直行加减速等驾驶动作。
激光雷达在BEV架构中如何发挥作用

激光雷达三维点云模式本身就是三维立体的鸟瞰图(BEV),目前BEV鸟瞰图视角技术是通过深度学习Transformer将视觉图像信息从2D转换为3D,让图像信息变成鸟瞰图,使其模式与激光雷达三维点云相仿,这让视觉和激光雷达以及其他传感器的前融合变得容易,两者的前融合可以给感知算法提供更多的设计空间,从而提高感知算法上限,例如大幅提高增强静态建模能力,这有助于加速自动驾驶脱离对高精地图的依赖。
BEV技术虽然让视觉感知由2D转换为3D,但是并不能解决视觉在黑夜、强光照过曝等场景失效问题,而且视觉对未知障碍物漏检、对常规障碍物位置精度低与轨迹预测不准确等问题依然存在。
在BEV前融合框架下,激光雷达的优势可以充分发挥,比如激光雷达对未知障碍物、道路边沿以及可行驶区域等检测能力,这都将更好地服务智能驾驶,尤其在中国复杂的道路交通场景中,此优势体现更加明显。
如果你是汽车发烧友,关注智能汽车、竞品对标、数据报告、智能驾驶、接管率、危险接管里程、续航达成率、泊车成功率、揉库次数、智能座舱、评价指标、车主群...微信搜车控CHEK一下!














 695
695











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









