







代码链接
针对的领域:从原始的点云数据进行3D目标检测
框架的组成:从下到上的3D建议生成;精炼建议在标准坐标来获得最后的检测结果
展开描述
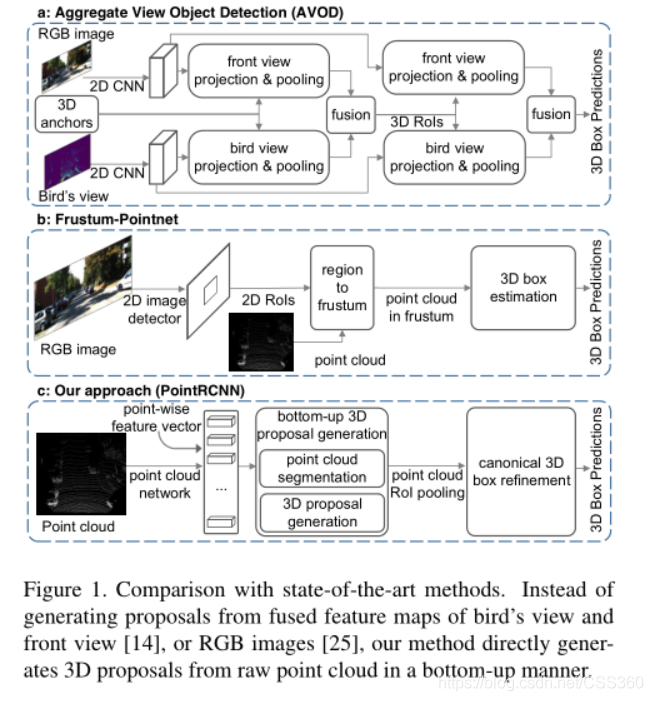
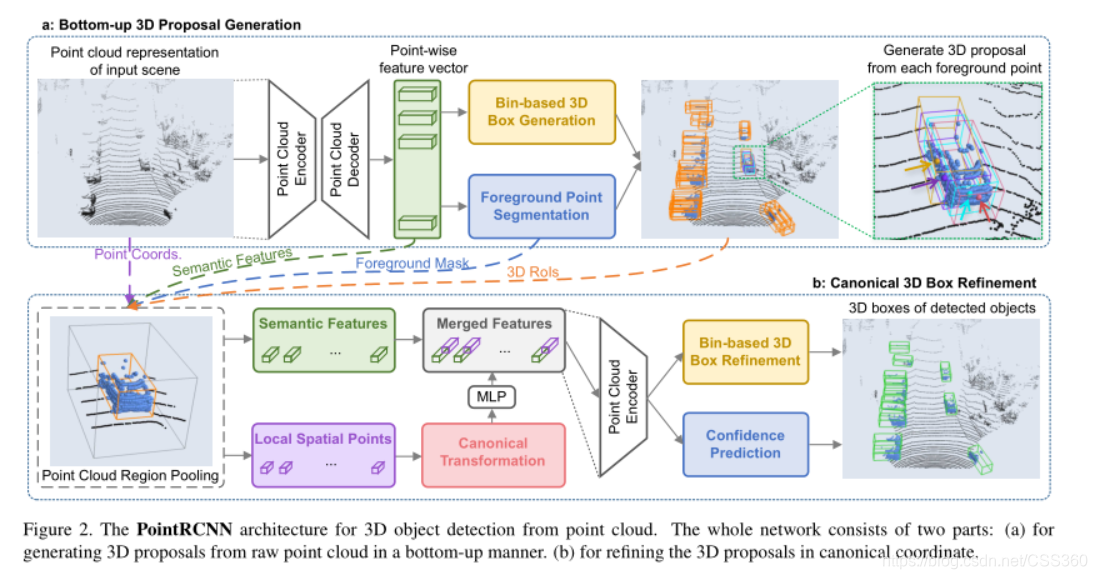
不像原先方法从RGB图像、投影点云到鸟瞰图、体素得到建议,我们的阶段1子网络直接生成一个小数量的高质量3D建议从点云在一个由下到上行为通过分割整体场景的点云到前景点云和背景点云。阶段2子网络转换池化点云的每个建议到标准坐标来学习比较好的本地空间特征,并与在阶段1得到的整体分割特征中每个点进行结合,来得到精确的框和更高置信度的预测。通过在3D检测标准数据集KITTI的实验表明,我们提出的框架性能优于先前的方法,只使用点云作为输入的显著边缘。
本网络模型与先前网络模型比较
系统框架
性能对比
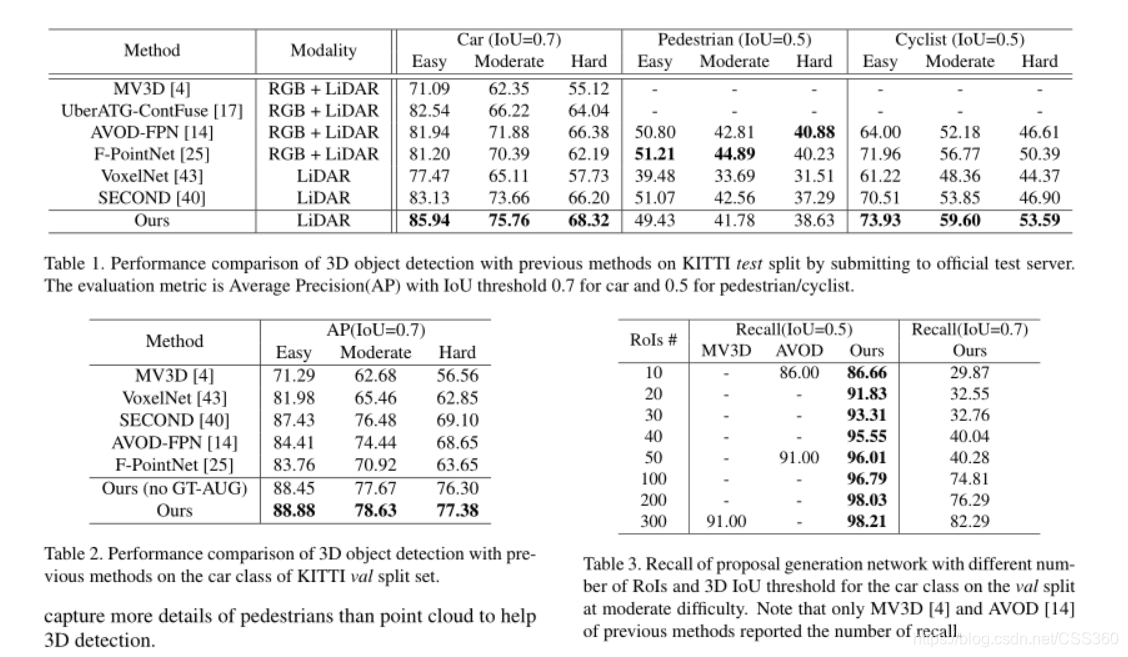
说明:该论文证明 bin-based loss在3D框检测的有效性
了解更多关于《计算机视觉与图形学》相关知识,请关注公众号:

下载我们视频中代码和相关讲义,请在公众号回复:计算机视觉课程资料


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









