






编辑 | 机器之心
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【全栈算法】技术交流群
论文刚发布两天,「二创」就开始了。
AI 技术的迭代,已经以天为单位。所以,如果你有什么好的想法,最好赶紧做,不然睡一觉可能就被抢先了。

这个被很多人看好的 idea 源于 Meta 两天前发布的「分割一切」AI 模型(Segment Anything Model,简称 SAM)。Meta 表示,「SAM 已经学会了关于物体的一般概念,可以为任何图像或视频中的任何物体生成 mask,甚至包括在训练过程中没有遇到过的物体和图像类型。SAM 足够通用,可以涵盖广泛的用例,并且可以在新的图像『领域』即开即用,无需额外的训练。」
这一模型的发布在计算机视觉领域引发轰动,预示着 CV 也将走向「一个全能基础模型统一某个(某些?全部?)任务」的道路。当然,大家对此早有预感,但没想到这一天来得如此之快。
比基础模型迭代更快的是研究社区「二创」的速度。论文才刚刚发布两天,几位国内工程师就基于此想出了新的点子并将其付诸实践,组建出了一个不仅可以「分割一切」,还能「检测一切」、「生成一切」的视觉工作流模型。
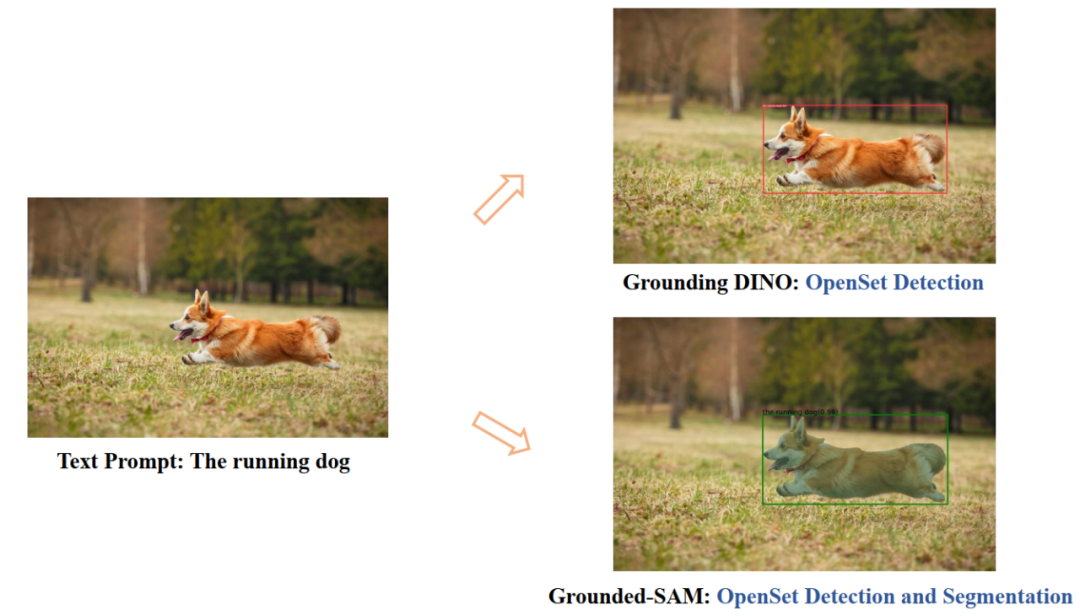
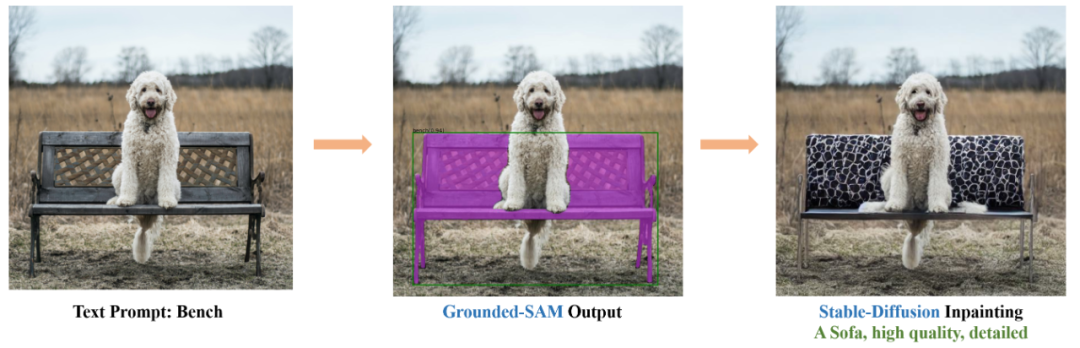
具体来说,他们使用一个 SOTA 的 zero-shot 目标检测器(Grounding DINO)提取物体 box 和类别,然后输入给 SAM 模型出 mask,使得模型可以根据文本输入检测和分割任意物体。另外,他们还将其和 Stable Diffusion 结合做可控的图像编辑。
这个三合一模型项目名叫 Grounded Segment Anything,三种类型的模型既可以分开使用,也可以组合使用。
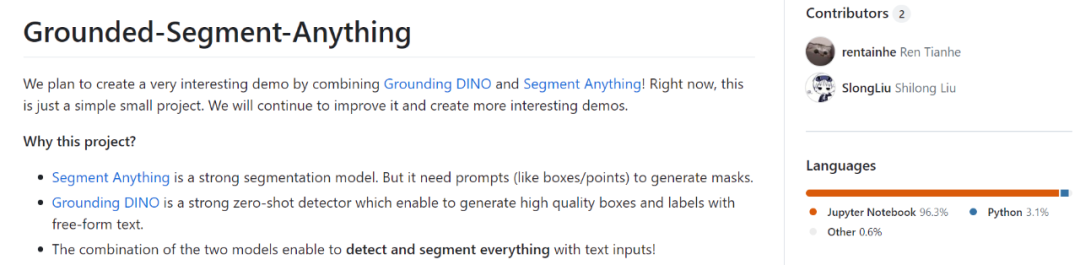
项目链接:https://github.com/IDEA-Research/Grounded-Segment-Anything
对于 Grounded Segment Anything 未来的用途,项目作者构想了几种可能:
可控的、自动的图像生成,用于构建新的数据集;
提供更强的基础模型与分割预训练;
引入 GPT-4,进一步激发视觉大模型的潜力;
一条自动标记图像(带 box 和 mask)并生成新图像的完整 pipeline;
……
安装
要实现 SAM+Stable Diffusion 需要一些安装步骤。首先该项目要求 Python 3.8 以上版本,pytorch 1.7 以上版本,torchvision 0.8 以上版本,并安装相关依赖项。项目作者还建议安装支持 CUDA 的 PyTorch 和 TorchVision。
然后,按照如下代码安装 Segment Anything:
python -m pip install -e segment_anything安装 GroundingDINO:
python -m pip install -e GroundingDINO以下是可选依赖项,这些对于掩码后处理、以 COCO 格式保存掩码、example notebook 以及以 ONNX 格式导出模型是必需的。另外,该项目还需要 jupyter 来运行 example notebook。
pip install opencv-python pycocotools matplotlib onnxruntime onnx ipykernel运行 GroundingDINO demo
下载 groundingdino 检查点:
cd Grounded-Segment-Anything
wget https://github.com/IDEA-Research/GroundingDINO/releases/download/v0.1.0-alpha/groundingdino_swint_ogc.pth运行 demo:
export CUDA_VISIBLE_DEVICES=0
python grounding_dino_demo.py \
--config GroundingDINO/groundingdino/config/GroundingDINO_SwinT_OGC.py \
--grounded_checkpoint groundingdino_swint_ogc.pth \
--input_image assets/demo1.jpg \
--output_dir "outputs" \
--box_threshold 0.3 \
--text_threshold 0.25 \
--text_prompt "bear" \
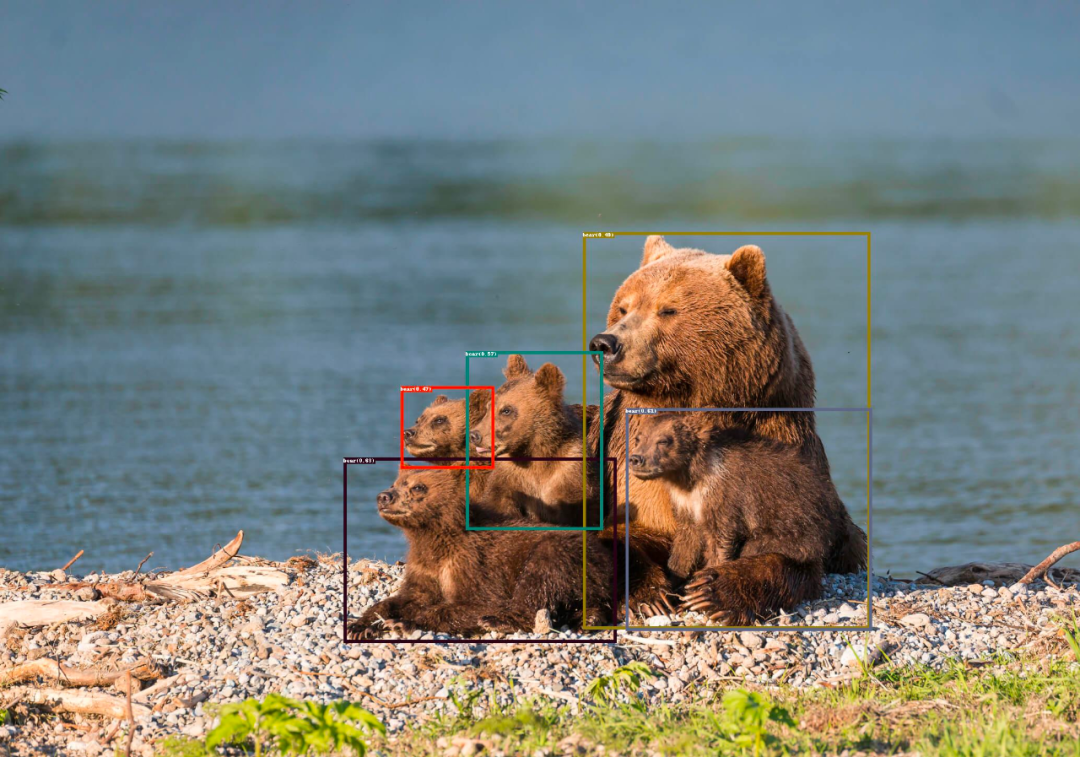
--device "cuda"模型预测可视化将保存在 output_dir 中,如下所示:
运行 Grounded-Segment-Anything Demo
下载 segment-anything 和 ground- dino 的检查点:
cd Grounded-Segment-Anything
wget https://dl.fbaipublicfiles.com/segment_anything/sam_vit_h_4b8939.pth
wget https://github.com/IDEA-Research/GroundingDINO/releases/download/v0.1.0-alpha/groundingdino_swint_ogc.pth运行 demo:
export CUDA_VISIBLE_DEVICES=0
python grounded_sam_demo.py \
--config GroundingDINO/groundingdino/config/GroundingDINO_SwinT_OGC.py \
--grounded_checkpoint groundingdino_swint_ogc.pth \
--sam_checkpoint sam_vit_h_4b8939.pth \
--input_image assets/demo1.jpg \
--output_dir "outputs" \
--box_threshold 0.3 \
--text_threshold 0.25 \
--text_prompt "bear" \
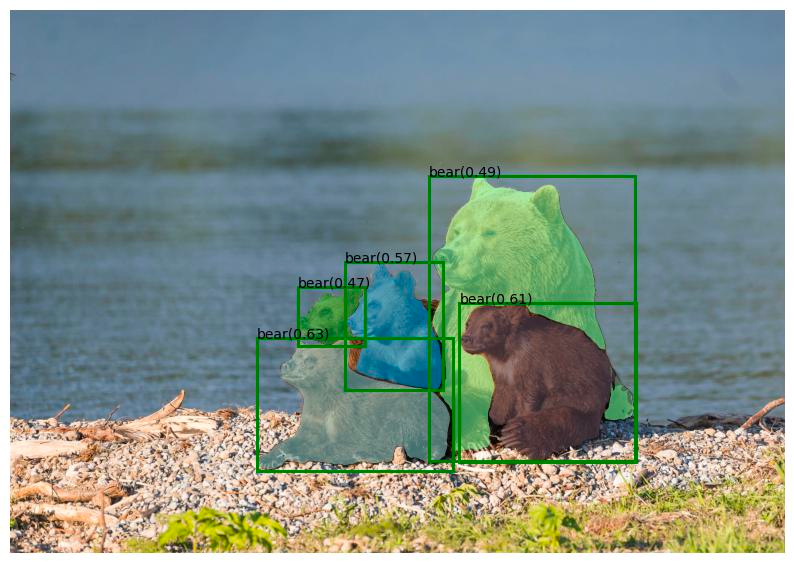
--device "cuda"模型预测可视化将保存在 output_dir 中,如下所示:
运行 Grounded-Segment-Anything + Inpainting Demo
CUDA_VISIBLE_DEVICES=0
python grounded_sam_inpainting_demo.py \
--config GroundingDINO/groundingdino/config/GroundingDINO_SwinT_OGC.py \
--grounded_checkpoint groundingdino_swint_ogc.pth \
--sam_checkpoint sam_vit_h_4b8939.pth \
--input_image assets/inpaint_demo.jpg \
--output_dir "outputs" \
--box_threshold 0.3 \
--text_threshold 0.25 \
--det_prompt "bench" \
--inpaint_prompt "A sofa, high quality, detailed" \
--device "cuda"运行 Grounded-Segment-Anything + Inpainting Gradio APP
python gradio_app.py参考链接:
https://zhuanlan.zhihu.com/p/620271321
https://www.zhihu.com/question/593914819/answer/2972925421
视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)

(扫码学习最新视频)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称















 1832
1832











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









