






作者 | 袁洋 编辑 | 极市平台
原文链接:https://zhuanlan.zhihu.com/p/634466306
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【全栈算法】技术交流群
本文只做学术分享,如有侵权,联系删文
导读
在不使用任何假设的情况下,刻画出对比学习与谱聚类算法的等价关系。
对比学习是大模型的入门算法。它的想法很简单:对于输入, 找一些它的正样本和负样本,希望在学习之后的网络特征空间中,离正样本近一点,负样本远一点。
实际上,对比学习并非个例,预训练算法大多非常简单:要么是遮盖一部分数据内容让模型猜出来,要么是让模型不断预测一句话的下一个词是什么等等。因为这些算法过于简单,人们很难理解它们究竟如何创造出了强大的模型,所以往往会把大模型的成功归功于海量数据或巨大算力,把算法设计归为炼丹与悟性。
有没有更本质的方式,可以帮助我们理解对比学习?下面我给大家介绍一下我们最近的工作[1],可以在不使用任何假设的情况下,刻画出对比学习与谱聚类算法的等价关系。
呃……但这关我什么事?
从理论的角度来看,对比学习与谱聚类算法的等价关系是一个很优美的结果,至少我是这么觉得的——但这对大部分朋友来说并不重要。实际上,可能有一半以上的AI科研人员对谱聚类不太熟悉,对这样的理论刻画自然没有太多兴趣。不仅如此,
对比学习与谱聚类算法的关系不是我们第一个提出的。人们早就在实践中发现,对比学习得到的模型在分类任务上有突出的效果,但是在其他下游任务中表现一般。马腾宇老师组在2021年的论文[2]中极具创新性地证明了,如果把对比学习中常用的InfoNCE loss改成某种变体(他们称之为spectral contrastive loss),那么得到的模型几乎就是在做谱聚类:是谱聚类的结果乘以一个线性变换矩阵。换句话说,他们已经证明了,对比学习的变体是谱聚类的变体。我们的结果可以看作是对他们结果的进一步完善:对比学习就是谱聚类。因此,虽然我们的结果可以看做是这个问题的一个完美句号,但并不出人意料。
我们的理论框架精致,但并非原创。事实上,我们使用了Van Assel等人2022年发表的用于分析Dimension reduction的概率图框架[3],将其调整之后用于对比学习分析之中。虽然这一调整并不显然,相信原作者也没有想到他们的框架可以用来分析预训练模型;但是我们的理论工具确实来源于他们的工作。
所以我想,我们的工作最重要的地方是提供了理解大模型的新视角。对我来说,当对比学习的底层逻辑以一种简洁、优雅的方式展现出来时,它的意义远远超出了谱聚类的理论刻画本身,给我带来了巨大震撼。这种新的视角可以帮助AI从业者更好地理解预训练算法和模型,对未来的算法设计与模型应用都会有帮助。当然,这意味着要先理解一点点数学——不过我保证,这是值得的。
从SimCLR谈起
我们先从Hinton团队2020年提出的SimCLR算法[4]谈起,它也是对比学习的代表算法。SimCLR专门用于理解图像,它基于一个重要的先验知识:把一只狗的图片进行翻转、旋转、切分或者其他相关操作,得到的图片还是在描绘同一只狗。具体来说,论文中考虑了9种不同类型的操作,如下图所示:
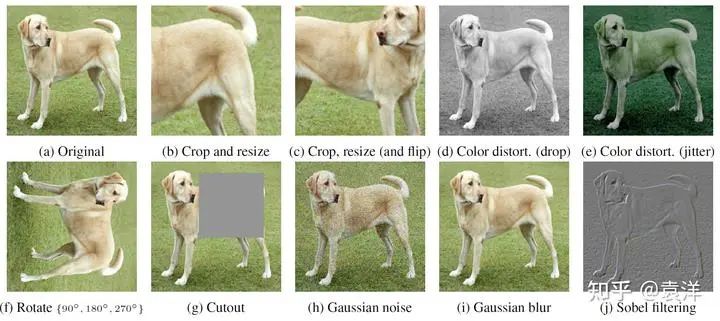
对于人类来说,上面的这些图一看就是同一只狗。针对任何一张图片 ,我们可以通过这样的方法随机生成两个它的变体,称之为 和 。既然这两个变体图片描述的是同一个东西,它们应该包含了极为相似的语义信息。可是,一只狗的像素矩阵,和将它旋转之后得到的像素矩阵,在像素空间中天差地别。那么,我们能不能找到一个语义空间,使得这两者相似呢?这就是SimCLR算法,见下图(我们基于原文的示意图进行了微小的调整)。
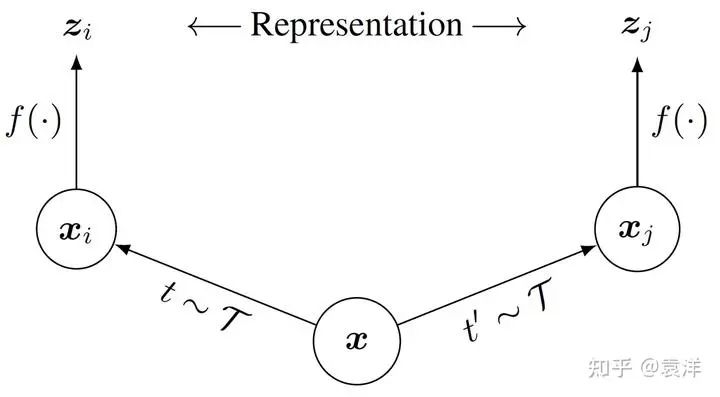
可以看到, 假如我们通过预先定义的图片操作, 生成了 和 。然后我们把它们分别塞进神经网络 中, 得到了两个向量 。我们希望这两个向量比较接近, 毕竟他们代表的图片有相似的语义。
可是, 如果使用这个标准来训练模型的话, 模型非常容易偷懒。试想, 倘若 把所有的输入都映射到同一个输出, 那自然满足我们的要求, 但是这个模型什么都没有学到。因此, SimCLR引入了负样本, 即从数据集中随机选一些图片生成 , 使得 比较近, 但是和 又比较远。这样, 就没法偷懒, 不得不认认真真学点东西了。
使用这个想法设计的损失函数叫做InfoNCE loss, 它有一个令人望而生畏的数学定义。假如给定一个图片 和它的正样本 , 还有一系列负样本, 我们叫它们 , 那么损失函数定义为 (我们进行了等价变换, 详见论文 :
这个式子很复杂,但是如果我们愿意抓大放小的话,它也很简单。所谓的抓大放小,就是先不管那些我们不明白的部分,只看它的主要意思。按照这个指导思想,我带着大家过一遍:
开头为什么有个负号? 说明后面的式子越大越好。为什么要加个log? 不懂, 我们先不管, 之后再说。下面这个分式是什么? 可以看到, 分子在分母中也出现了, 我们就把分子当做 的相近程度即可。分式的意思就是说, 与 这对正样本的相近程度, 相比 和 那些负样本的相近程度,应该越大越好。
为什么 能够表示两个图片的相近程度呢? 的含义很清楚, 就是把 塞进神经网络得到的表征。exp和 代表了高斯核函数, 是一种刻画两个表征的相似度的方法。。
上述就是SimCLR算法分析的传统思路。我们跳过或者模糊不清的部分,就是深度学习中非常重要的玄学——不懂没关系,效果好就行。
我们今天的目标,就是把这些部分解释清楚,同时给出一个与传统分析思路截然不同的新思路。整个故事环环相扣,我们把SimCLR算法搁置一下,先从理想空间谈起。
什么是理想空间?
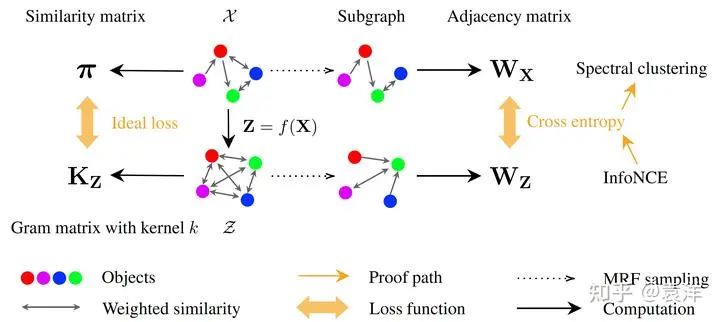
我们刚才谈到,在像素空间中,模型很难理解一张图片的语义。为了能够让模型更好地理解图片的语义,我们需要找到一个更好的空间,我称之为理想空间(即刚才说的语义空间)。在理想空间里,任何两个图片的语义关系可以非常方便地计算出来。比如说,在对比学习考虑的问题里,我们可以使用一个简单的函数 直接算出 与 的相似关系。所以说,在理想空间中,图片的语义对于模型来说是“显然”的,因为任何两个图片的关系可以用 计算得到。如下图所示:
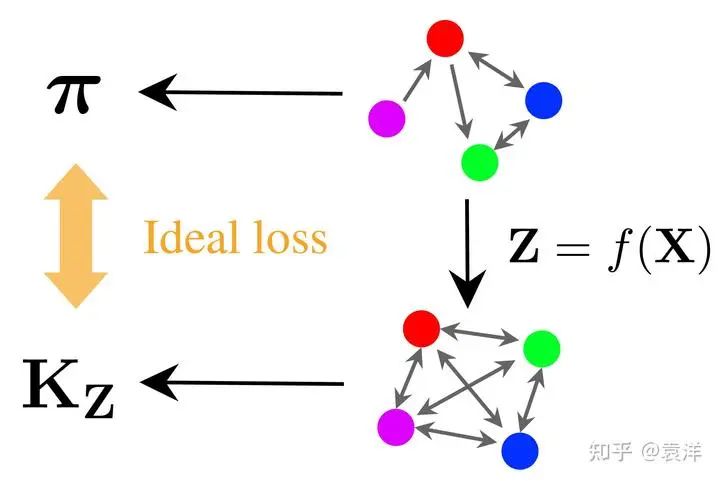
图中第一行的四个圆点表示四个数据点(在我们这里就是四个图片),圆点间的箭头表示它们之间的关系(我特意画了有向箭头,所以关系可以是单向的)。一般来说,关系可以非常复杂,但是今天我们假设两个点之间的关系可以用一个实数表示。这样,这些点与关系就形成了一个图,可以用邻接矩阵表示。在SimCLR算法中,两个点之间的关系等价于它们被选为一对正样本的概率,表示它们的相似程度。
我们的目标是通过神经网络 计算出一个理想空间 (第二行), 使得在这个空间中, 任何两个点 之间的关系可以用一个简单的数学函数 计算得到。今天我们考虑的是一种极为简单的 函数,我们要求 可以简化写成 ,即 具有平移不变性。
从图中可以看到, 我特意在任何两个点之间都画了双向箭头, 这是因为任何两个点都可以用 算出关系。这和第一行的关系图不同,因为第一行很可能存在两个点没有关系,或者只有单向关系。我把第二行的关系用邻接矩阵 来表示。
在理想的情况下,我们希望 和 是一样的。可是,如果 是对称的,而 存在有向边,那这两个矩阵完全一样是不可能的。所以, 我们需要定义一个损失函数来刻画它们的距离, 然后使用优化算法进行优化。这样,我们就得到了一个可以将对象映射到理想空间的神经网络 的算法。
然而,这个算法有个问题,就是损失函数不好算。考虑到我们的数据集非常大,可以包含几百万张甚至更多图片,所以上下两行对应的图都非常庞大,无法直接计算两个邻接矩阵的距离。那该怎么办呢?
很简单,我们可以对原图进行降采样,取两个子图进行比较。如下图所示:
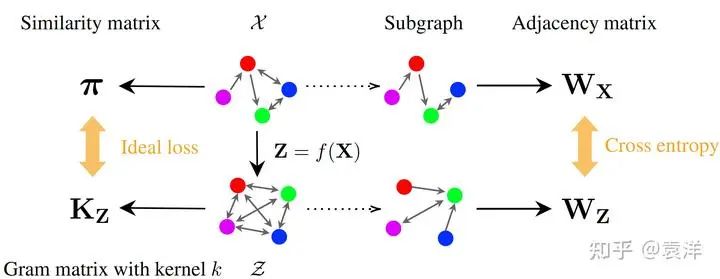
可以看到,左边计算Ideal loss可能很困难,所以我们走右边的虚线,通过子图采样的方法,得到两个子图 。通过使用交叉熵让两个子图尽可能接近,我们也可以驱使模型学习到好的理想空间。但是要注意,这个思路本质是一种启发式算法,必要但并不充分:原图一致意味着子图一致,但是子图一致不意味着原图一致。
子图采样评分
如何对原图采样呢?我们可以使用Van Assel等人提出的框架[3],使用Markov随机场。对这个工具不太熟悉的朋友不必惊慌,它背后的原理很简单。如果我们想要对原图采样(假设它有 个点),那么我们首先需要定义子图的分布。这个分布说白了,就是给每个子图一个得分,使得每个子图被采到的概率与它的得分成正比。换句话说,我们需要设计一个评分函数,用于给每个子图评分,这样就可以定义出一个采样的分布。分高的经常被采,分低的就不怎么会被采到。
所以,评分函数的定义,就决定了采样分布——我们需要设计一个合理的评分函数。我们考虑一个极为简单的办法,就是只考虑出度为1的子图。具体来说,这样的子图保持了原图的点不变,但是只给每个点留了1个出去的有向边。如果我们把这样的一个子图叫做 ,那么当我们给定原图的时候(用邻接矩阵表示),我们可以定义 的评分为:。
注意到, 由于 每个点的出度为 1 , 所以它的邻接矩阵里面的数要么是 0 , 要么是 1 。从这个角度来看, 我们把 放到了 的指数上, 所以只有当 时 才会被计算到连乘中, 否则不会。换句话说, 当 选中的边两端的点相似度(由 定义)较高时, 评分更高, 更容易被采到。
非常神奇的是, 基于这样的采样方式, 的每一行彼此之间都是独立的, 并且每一行(因为出度为 1 , 所以有且仅有一个 1 是从多项式分布 中采样得到的。换句话说, 对于第 行的 W来说, 它的第 列为 1 的概率恰好为 。当然, 这里的 如果替换成 结果也是一样的。
从SimCLR到谱聚类
一旦理解了子图的采样方法, 剩下的部分就容易很多。从上图来看, 我们需要优化 的交叉熵。我们知道这两个矩阵的每一行都是独立的, 所以可以单独拿出来计算。换句话说, 我们可以针对每一行 计算 的交叉熵, 然后加起来。具体来说, 对于给定的 , 我们需要计算每一列 配对的可能性。注意到 ,因为我们假设没有指向自己的边:
我们之前提过, 由于 的采样特点, 上式的右半部分 (当 时)。另外, 根据 ,不难算出当 是高斯核函数的时候:
注意到, , 所以我们进一步可以得到:
这恰好是SimCLR的InfoNCE损失函数!
另一方面, 我们真正需要优化的损失函数还有左半部分 这一项。这一项恰好对应于SimCLR算法针对每项输入 进行增广采样时, 采到 这两个对象为一对正样本的概率。换句话说, SimCLR算法正好在优化 这一损失函数。
另一方面, Van Assel等人的论文 中证明了, 上述损失函数等价于在 上进行谱分解。因此, 我们就证明了SimCLR算法本质是在相似图上做谱分解算法, 如下图所示:
拓展到CLIP
与SimCLR相比,CLIP算法的用途更加广泛。例如,OpenAI提出的文图生成模型Dall-E2就是使用CLIP模型将文字与图像连在了一起,使得人们可以使用文字生成极高质量的图片。CLIP算法同样很简单,就是把图像和其文字描绘当做一组对象,使用InfoNCE损失函数把这两个对象连在一起。使用我们的分析方法,不难发现CLIP本质是在一个二分图上做谱聚类,具体可以参考论文[1]。
总结
可以看到,我们全程并没有为了证明SimCLR而证明SimCLR,也没有加入任何假设。实际上,我们是先从理想空间的角度来理解SimCLR算法,认为应该采用子图采样的方式才能够把理想空间学到。子图采样的方法有很多,我们选了比较自然、容易计算的一个,而它恰好就直接对应了SimCLR的算法!真是颇有一种踏破铁鞋无觅处,得来全不费工夫的感觉。
我认为这背后提供的新视角是非常重要的。SimCLR/CLIP这些基础的预训练算法,其实是在把对象映射到理想空间,使得要学习的关系在理想空间中可以用简单函数自然地计算。当我们关注预训练算法的时候,我们不应该只看它的算法描述,而应该更多地关注模型通过学习对象的表征,构建了一个什么样的理想空间。
毕竟,算法的最终目标可能要比算法的前行路线更值得分析。
本文介绍的论文题为《Contrastive Learning Is Spectral Clustering On Similarity Graph》[1],由谭智泉、张伊凡、杨景钦和我合作完成。
参考
^abcd[3] https://arxiv.org/abs/2303.15103v2
^[1] https://arxiv.org/abs/2106.04156
^abc[2] https://arxiv.org/abs/2201.13053v2
^[4] https://arxiv.org/abs/2002.05709
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)
④【自动驾驶之心】平台矩阵,欢迎联系我们!

















 384
384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









