






为什么国内的智能驾驶能快速落地?
近两年来国内的智能驾驶技术的落地可以说是遥遥领先于世界。究其原因,除了本土智能汽车的巨大市场需求和大批智驾开发者们的辛勤付出之外,还应该归功于以Autoware, Openpilot和Apollo为代表的开源智能驾驶软件,为智能驾驶工程化的前期摸索做出了重要贡献。
而Autoware作为世界上第一款开源自动驾驶框架, 在全球各地都具备一定的影响力。Autoware支持多种传感器,包括相机、激光雷达(LiDAR)、惯导(IMU)和GPS等,并提供了多种传感器的驱动和融合算法。其主要功能包括:
感知:通过传感器融合算法和深度神经网络等技术,实现汽车、行人、物体等的检测与跟踪。
定位:结合GNSS和IMU传感器的3D地图和SLAM算法来实现精确定位。
规划与控制:基于概率机器人技术和基于规则的系统,部分还使用深度神经网络,实现路径规划、路径跟随以及加速/制动/转向控制等功能。
Autoware的优势:
模块化架构:Autoware集成了自动驾驶所需的所有功能,如感知、定位、规划和控制,并采用模块化架构设计,具有清晰定义的接口和API,方便用户进行定制和扩展。
可扩展性:Autoware的开源软件设计用于跨广泛的自动应用程序的可扩展性,并通过应用最佳实践和标准来实现现实世界部署中的高质量和安全性。
不断进化:Autoware持续发展,提供更多功能,以实现从路边到路边的L4级自动驾驶。其最新版本已经开始基于ROS 2.0进行重新设计,以进一步提升性能和稳定性。
多种应用场景:Autoware支持多种自动驾驶的应用场景,如出租车、公交车、货运、物流、农业、建筑、采矿等,能够提供完整的自动驾驶体验。
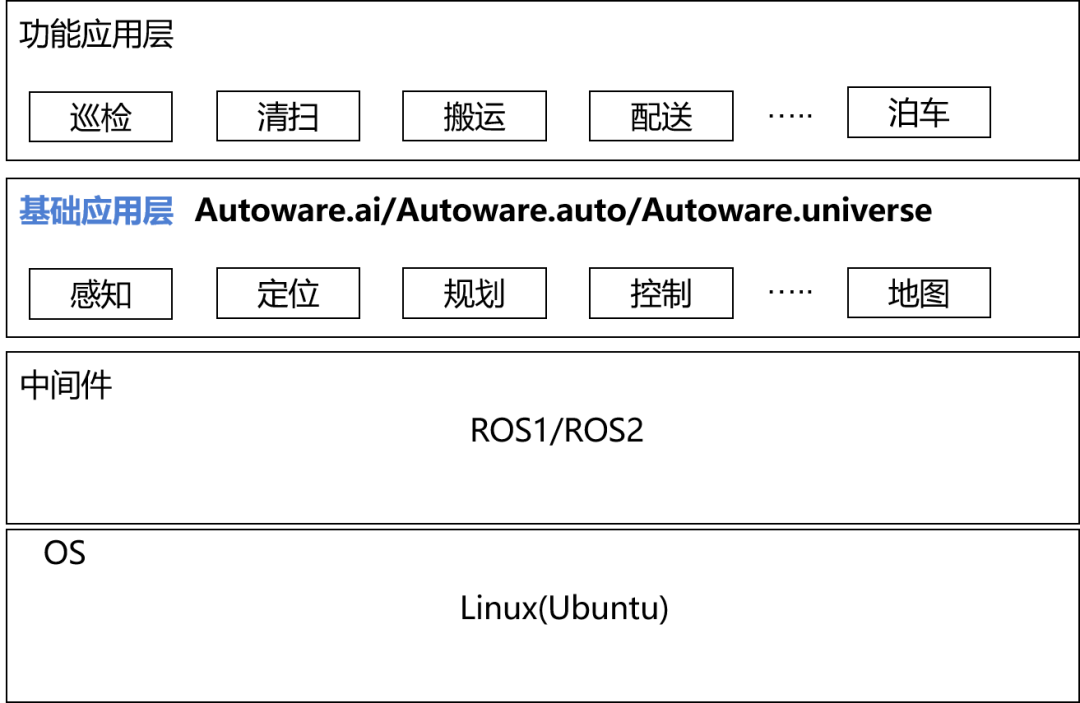
Autoware.universe作为Autoware系列最新的版本,一经开源便受到了业界的广泛关注。
Autoware.universe能做什么?
Autoware提供一套智能驾驶应用软件的完整解决方案
Autoware整合了定位、感知、规控等算法
Autoware具备良好的可维护性、可拓展性、可替换性
Autoware优先实现功能,每个模块并不是特别完美
Autoware并不能直接商用,需要进行二次开发
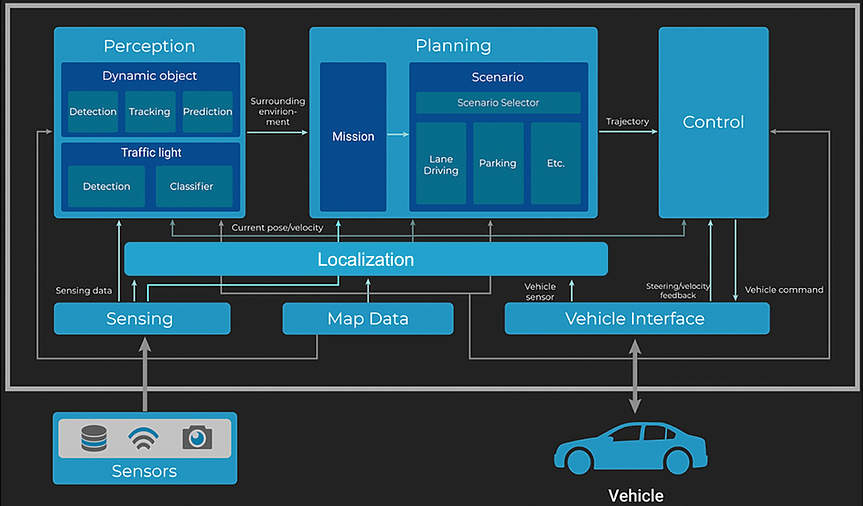
更详细地说,Autoware.Universe由以下七个核心模块组成:
Sensing:负责处理来自各种传感器的数据,如激光雷达(LiDAR)、摄像头、毫米波雷达(RADAR)等,将原始传感器数据转化为可以被其他模块理解和使用的格式。
Map:涉及高精度地图的使用和管理,包括静态地图信息的加载和动态地图元素的更新。地图数据对于路径规划和车辆定位至关重要。
Localization:专注于确定车辆在世界坐标系中的精确位置和姿态,通常使用GPS、IMU、轮速编码器和SLAM等技术实现。
Perception:负责环境的理解和识别,包括障碍物检测、行人和车辆识别、交通标志和信号灯的识别等。
Planning:负责制定车辆的行驶路线和轨迹,包括宏观的路径规划和微观的轨迹规划。
Control:接收Planning模块生成的轨迹指令,转化为车辆可以执行的控制信号,如转向角度、油门和刹车力度,实现闭环控制。
Vehicle Interface:充当软件和硬件之间的桥梁,负责将Control模块的控制信号发送给车辆的执行机构,并接收车辆状态反馈。
Autoware.Universe的内容十分丰富,功能和性能相较Autoware.Ai和Autoware.Auto两个前期版本有了质的飞跃。可以说当今各家装车智驾功能,如NOA和AVP,在工程化的过程中,都或多或少的有从Universe中进行过借鉴,找寻过灵感。在全球范围内,Autoware已经支持30余款车型,服务过500+公司,遍布20几个国家。
Autoware.universe的应用场景与定位

体系大,学习难度大!
Autoware.universe的功能架构设计,代码实现都比较借鉴于商用量产架构,十分复杂和庞大。对于没有一定基础的同学,学习难度极大。而又基于其强大的功能,大多数自动驾驶公司都会使用其中的模块或整套产品。
为此,自动驾驶之心联合智驾行业资深从业者,上线了全网一款系统讲解Autoware.universe的课程,帮助初学者们梳理Autoware.universe的架构,解析功能源码,以便于更好的工程落地应用。
大纲一览:

讲师介绍
天宇,某世界500强企业智能驾驶部门技术专家,在自动驾驶和机器人领域有丰富的项目经验,核心技术方向负责人,参与主导多个自动驾驶量产项目落地。小有名气的自动驾驶知识博主(全网同名Tech天宇),所设计并主讲的自动驾驶系列课程已经在全网为数百名学员提供了技术学习服务,深受学员好评。
我们将会怎么展开这个课程?
课程都讲了啥,一个视频给你说明:
Autoware官方宣传视频:
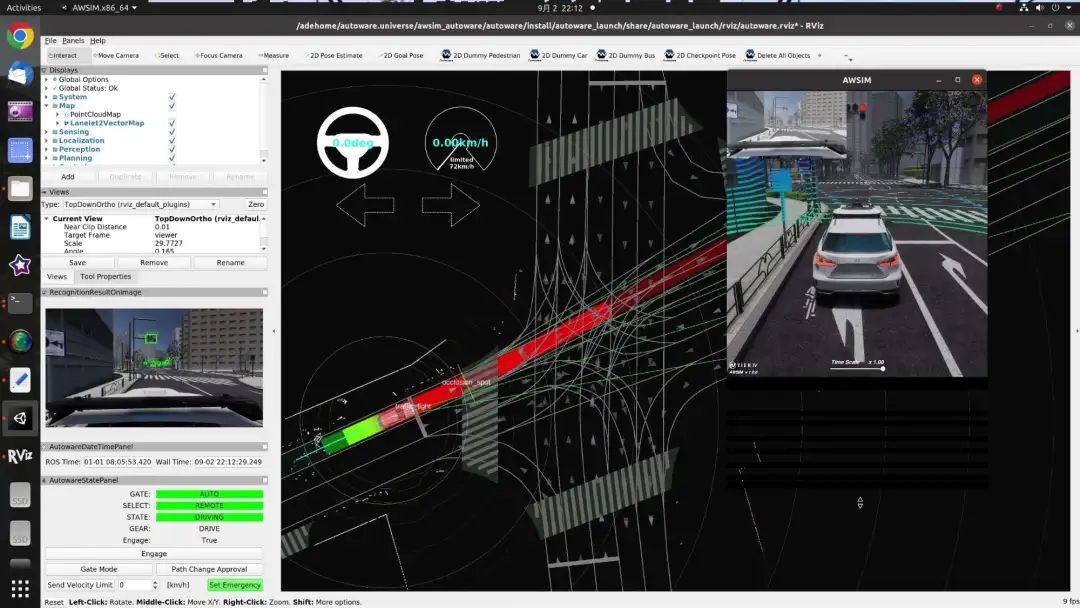
高阶自动驾驶端到端仿真demo的深度剖析:
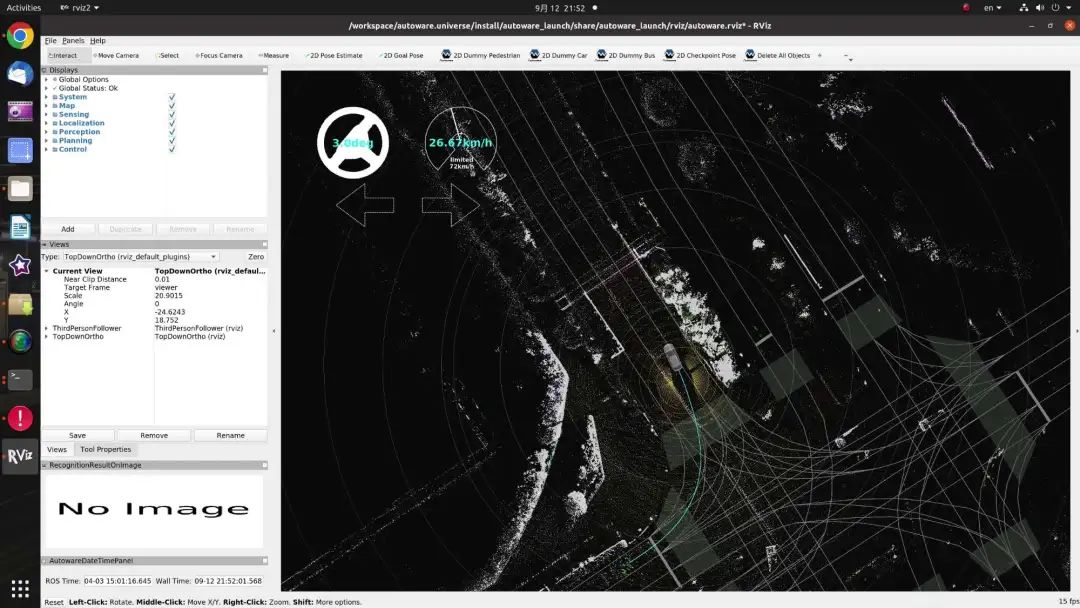
高阶自动驾驶数据回灌demo的深度解析:
当今最好的开源自动驾驶框架,专注于架构及代码本身,服务于真实项目/科研需求:
开放代码仓库,不用担心国内网速不佳;提供环境配置镜像,免去复杂的环境配置过程:
建立学习群,日常答疑服务
学习基础要求
电脑16G以上内存,gpu要求8G以上显存
一定的自动驾驶领域基础,熟悉自动驾驶基本知识
对C++和ROS比较熟悉
适合人群
智能驾驶行业的初级从业者
智能驾驶移动机器人方向的在读研究生或者高年级本科生
其他对智能驾驶移动机器人技术感兴趣的人
学后收获
对智能驾驶上游的定位感知系统有十分深刻的认识
有助于增长智能驾驶算法功能的工程实现经验
能够胜任围绕Autoware框架设计的智驾产品开发
欢迎咨询学习
扫码学习
欢迎咨询小助理了解更多
















 812
812

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









