






STM32HAL库方式实现温湿度传感采集
文章目录
一、I2C介绍
1.1 基本概念
I2C,全名Inter IC Bus,是一种由Philips公司开发的通用数据总线。它只需要两根通信线,即SCL(Serial Clock)和SDA(Serial Data),实现同步半双工通信方式,并支持数据应答机制。这种总线可以支持一个主设备和多个从设备的连接方式,也可以多主多从。这种通信方式被广泛应用于各种电子设备中,例如传感器、LED灯、显示器等,它的优点在于高效、可靠、易于实现、并且方便拓展。
1.2 硬件电路以及基本原理
1.2.1 硬件电路和基本结构
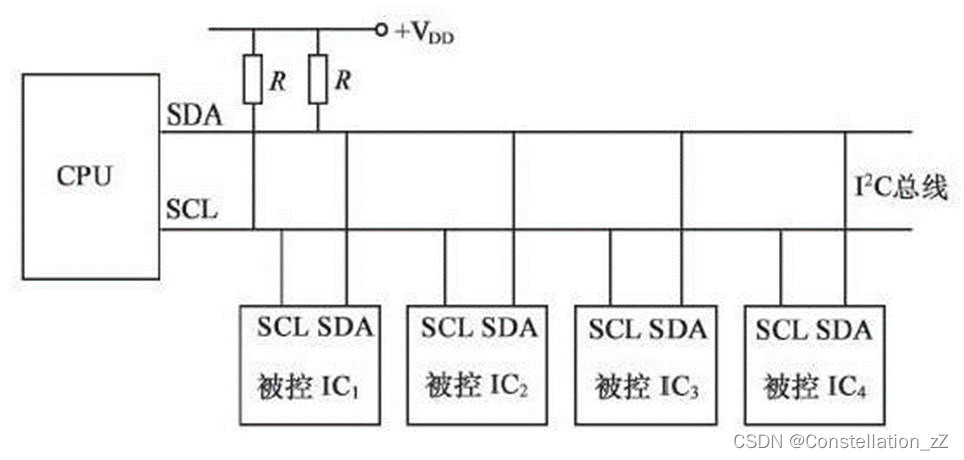
在I2C的硬件电路中,若满足一主一从或一主多从,所有的I2C设备的SCL和SDA都需要连在一起。且设备的SCL和SDA均要配置成开漏输出模式,以便在低电平时置0,在不为0时为浮空状态。SCL和SDA各需要添加一个上拉电阻,其电阻值一般为4.7k左右。硬件电路图如下:
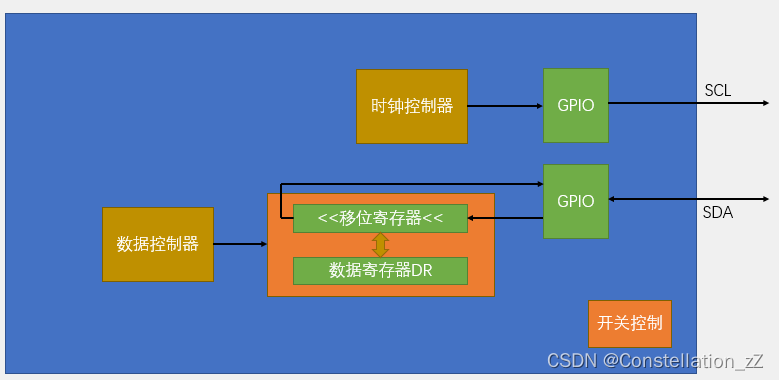
I2C实际上是一个时钟控制模块和数据控制器的结合。主机主导时钟控制,规定读写的频率周期。主机或者从机通过数据控制器将数据发送或者接收。基本结构如下:
1.2.2 起始条件与终止条件
I2C通信的初始条件为:在SCL为高电平期间,SDA从高电平切换到低电平。也就是说,我们利用SDA下拉触发SCL下拉,达成开始读写的条件。
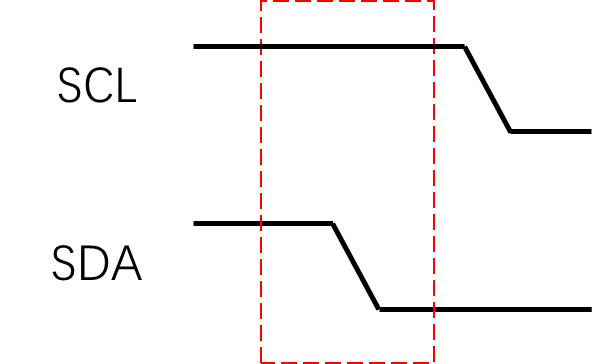
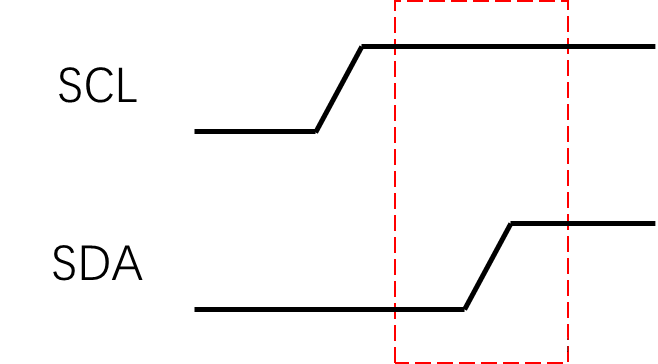
I2C终止读写的条件为,SCL在高电平期间,SDA从低电平切换到高电平。
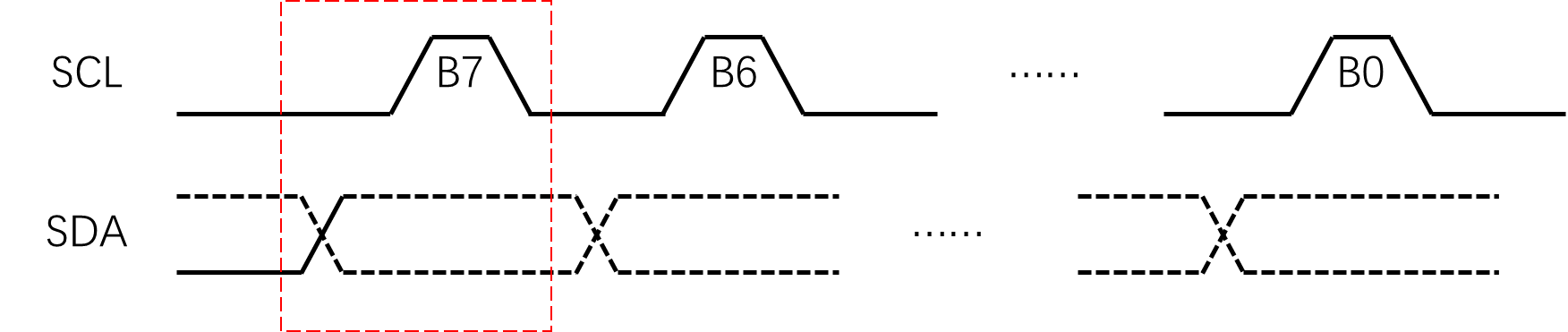
1.2.3 发送与读写一个字节
- 发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节

- 接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)
1.2.4 发送与读写应答机制
-
发送应答:主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
-
接收应答:主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)

1.3 软件读写I2C
软件I2C主要是通过编程软件(keil,IAR)等对GPIO电平的翻转设置从而对I2C通信的情况进行改变。比如可以通过GPIO的高低电平变化开启读写或者终止读写。通过对相应的GPIO(通用输入输出端口)进行位操作来模拟和实现I2C通信的各种功能。在一些特定的应用场景中,软件I2C具有一些独特的优势和灵活性。
- 灵活性:软件I2C可以运行在任何具备GPIO的通用MCU(微控制器)平台上,而不受硬件I2C控制器的限制。这使得软件I2C适用于兼容不同硬件平台或具有特殊通信需求的设备。
- 开销低:由于软件I2C不需要额外的硬件电路支持,因此在成本和电路设计方面开销较低。这对于资源受限的嵌入式系统或电路板设计中的简化和成本控制非常重要。
- 可定制性:软件I2C在编程上非常灵活,可以根据需求自定义通信协议和时序控制。这使得软件I2C能够适应各种不同的应用需求,并提供更加个性化的定制解决方案。
软件I2C也有一些限制和劣势:
- 数据传输延迟:由于软件I2C通信是通过对GPIO进行位操作来模拟传输,而不是使用硬件电路,因此通常速度较慢。相比于硬件I2C,软件I2C的传输速率较低,可能会引入一定的传输延迟。
- CPU负载高:软件I2C通信需要CPU的持续干预来完成数据的传输和处理,因此会增加CPU的负荷和资源消耗。这可能会导致系统性能下降,特别是当设备有其他关键任务需要处理时。
1.4 硬件读写I2C
除了我们手动改变电平控制外,STM32也自带了专门的硬件接口来实现I2C通信。在电路设计中,通常会使用硬件I2C控制器,该控制器集成了硬件电路来执行I2C通信的各种功能。硬件I2C控制器通常被集成在主控芯片或单片机中,提供了高速、可靠且高效的数据传输。硬件I2C具有以下特点:
- 高速传输:硬件I2C通常支持更高的传输速率,可达到几百Kbps甚至几Mbps。这使得在短时间内传输大量数据成为可能,适合需要高速通信的应用。
- 低处理器负载:硬件I2C在数据传输过程中,不需要CPU的大量干预,减轻了主控芯片或单片机的处理负荷。这使得主控芯片能够同时处理其他任务,提高了系统整体性能。
- 硬件支持:硬件I2C控制器集成了电平转换、时钟同步和数据接收发送等硬件电路,大大简化了外部电路的设计,并提高了通信的稳定性和可靠性。
相对而言,软件I2C是通过软件编程实现的I2C通信协议。与硬件I2C相比,软件I2C的实现更为灵活,但也带来了一些限制和劣势:
- 低速传输:软件I2C的传输速率一般较慢,通常仅在几十Kbps或更低级别。这可能会造成数据传输延迟,对于需要快速通信的应用,软件I2C可能无法满足需求。
- CPU负荷高:软件I2C通信通常需要CPU的协助来完成数据的传输和处理,这会导致CPU负荷增加,降低了系统的整体性能。
- 灵活性高:软件I2C允许用户通过编程方式自定义通信协议和时序控制,适用于一些特定的应用场景,例如需要兼容不同硬件平台或具有特殊通信需求的设备。
二、AHT20介绍
AHT20产品是基于I2C通信协议的温湿度传感器。
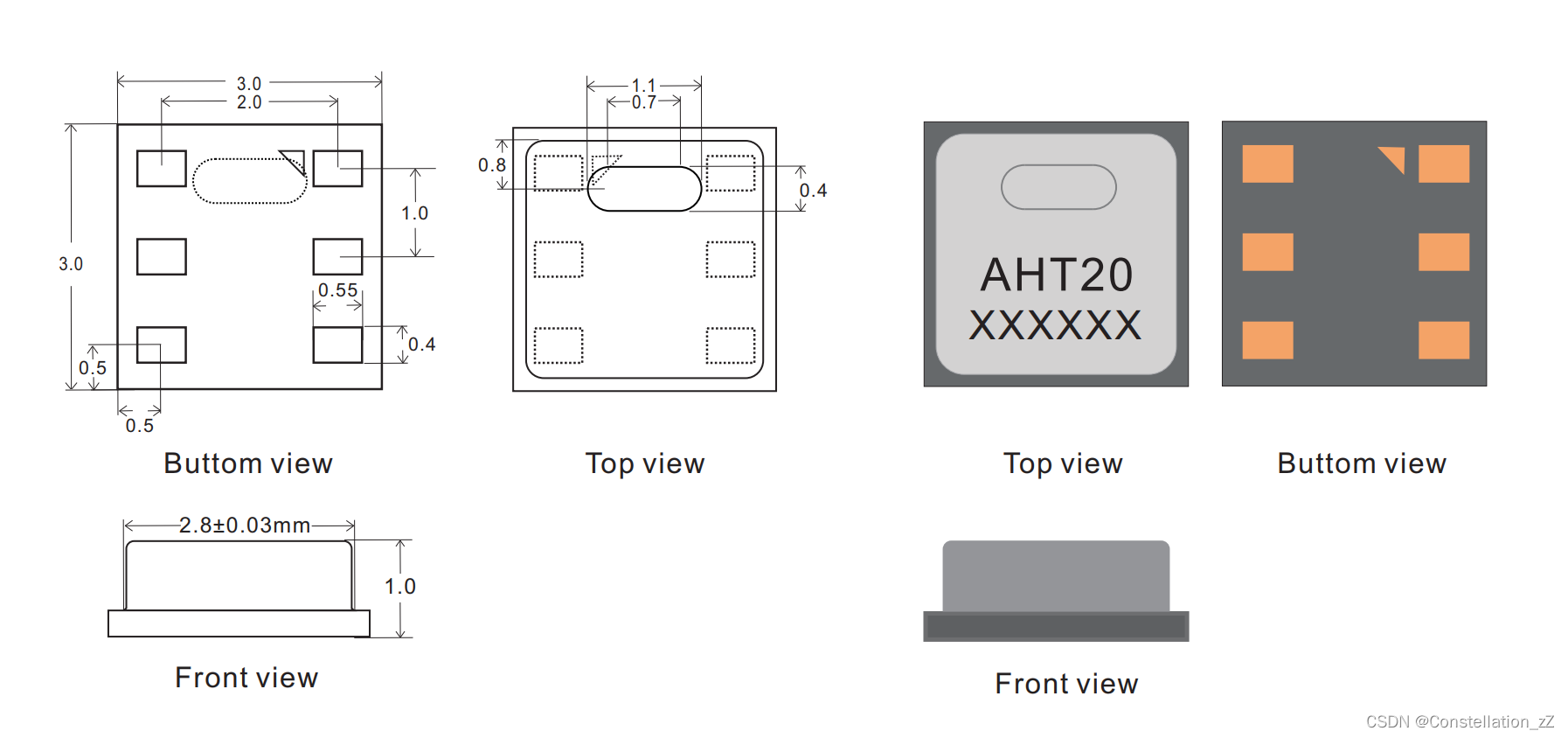
AHT20在尺寸与智能方面建立了新的标准:它嵌入了适于回流焊的双列扁平无引脚SMD 封装,底面 3 x 3mm ,高度1.0mm。传感器输出经过标定的数字信号,标准 I2C 格式。AHT20 配有一个全新设计的 ASIC专用芯片、一个经过改进的MEMS半导体电容式湿度传感元件和一个标准的片上温度传感元件,其性能已经大大提升甚至超出了前一代传感器的可靠性水平,新一代温湿度传感器,经过改进使其在恶劣环境下的性能更稳定。每一个传感器都经过校准和测试,在产品表面印有产品批号。由于对传感器做了改良和微型化改进,因此它的性价比更高,并且最终所有设备都将得益于尖端的节能运行模式。
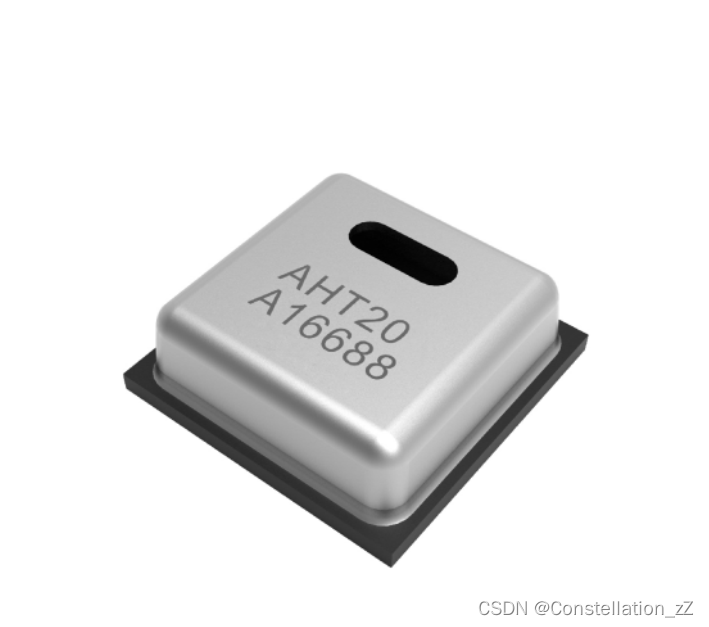
由于其稳定性和可靠性,其被广泛应用于暖通空调 、除湿器、测试及检测设备、消费品、汽车 、自动控制、数据记录器、气象站、家电、湿度调节、医疗及其他相关温湿度检测控制。 大致结构图如下:
三、创建工程以及基本配置
3.1 创建工程
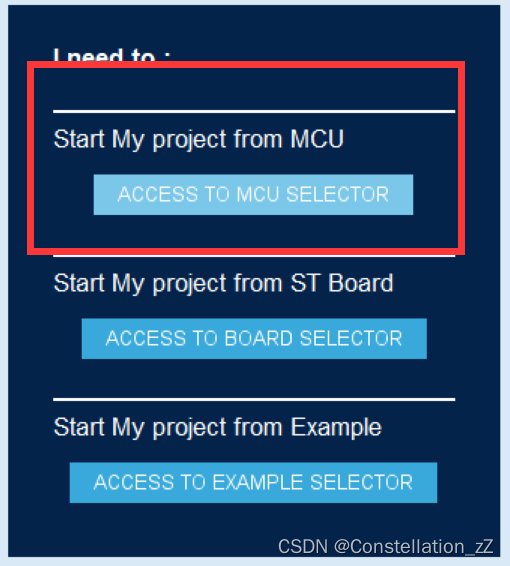
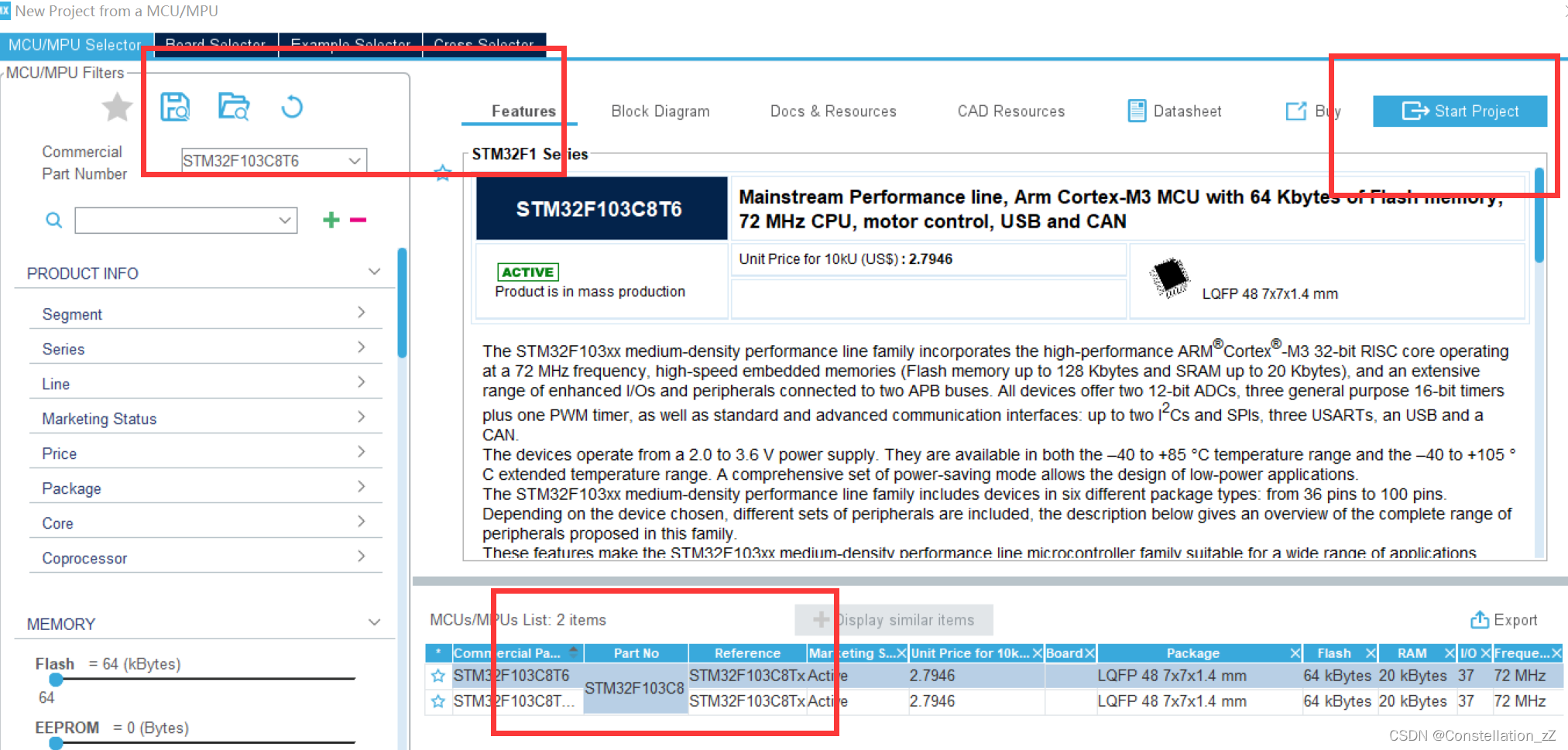
我们打开STM32CubeMX,在主页面选择新建工程
在弹出来的界面中选择STM32F103C8T6
3.2 基本配置
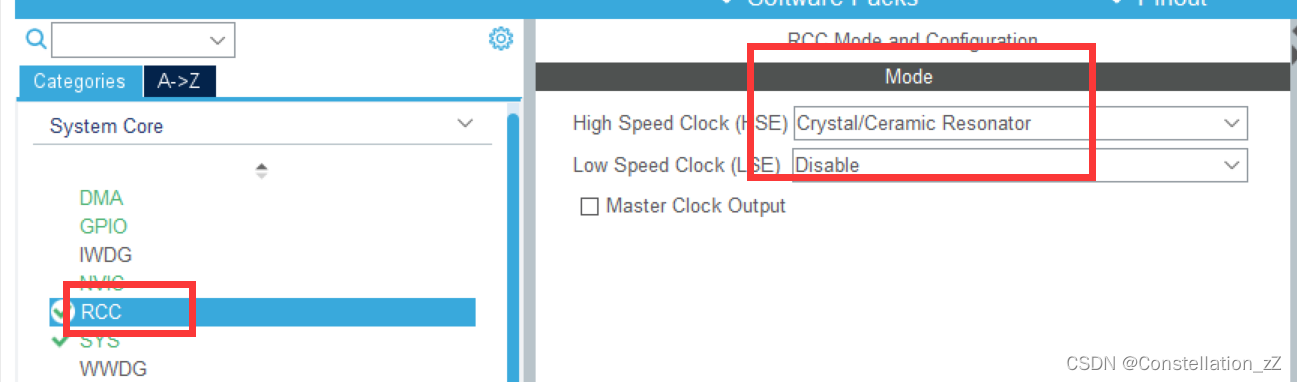
在工程配置界面,首先,使能高速时钟以打开时钟模块,在左栏点击“RCC”。
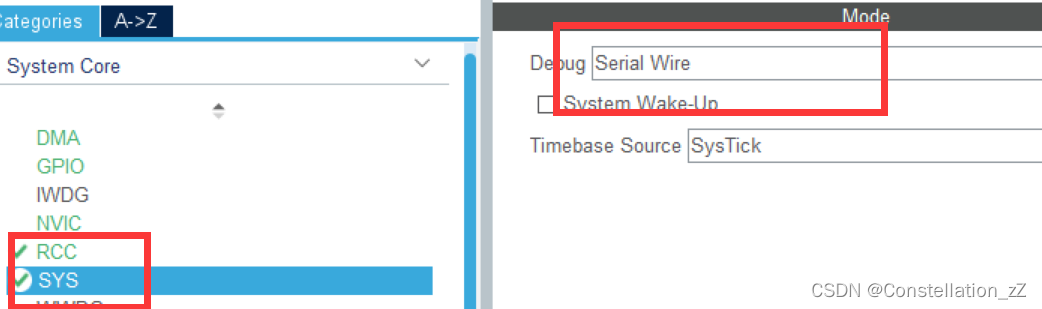
再配置SYS
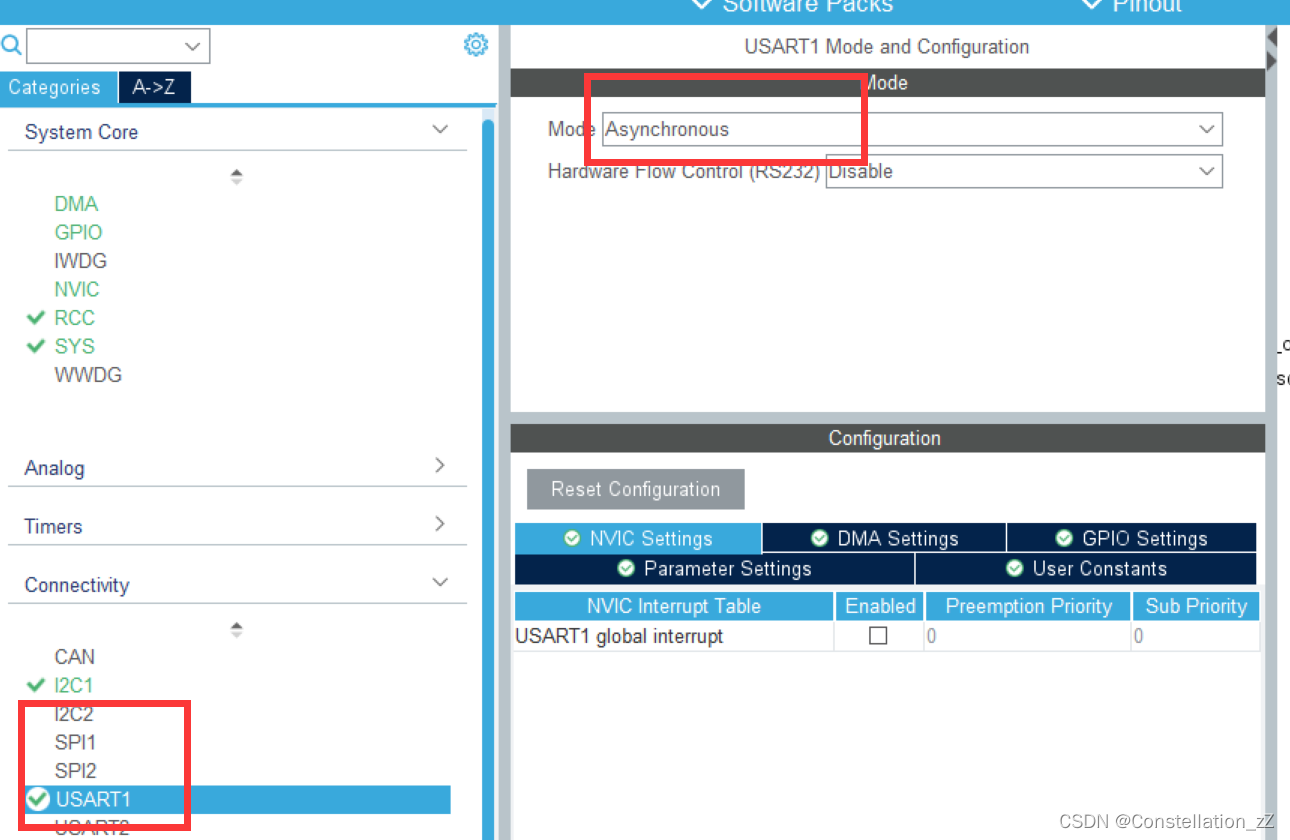
打开串口通信USART1,设置为异步模式
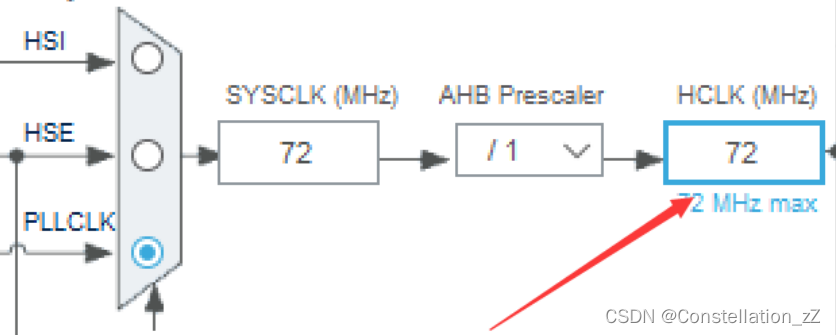
随后我们打开时钟配置“clock configuration”,设置为内部时钟模式并把频率设置为72MHz。
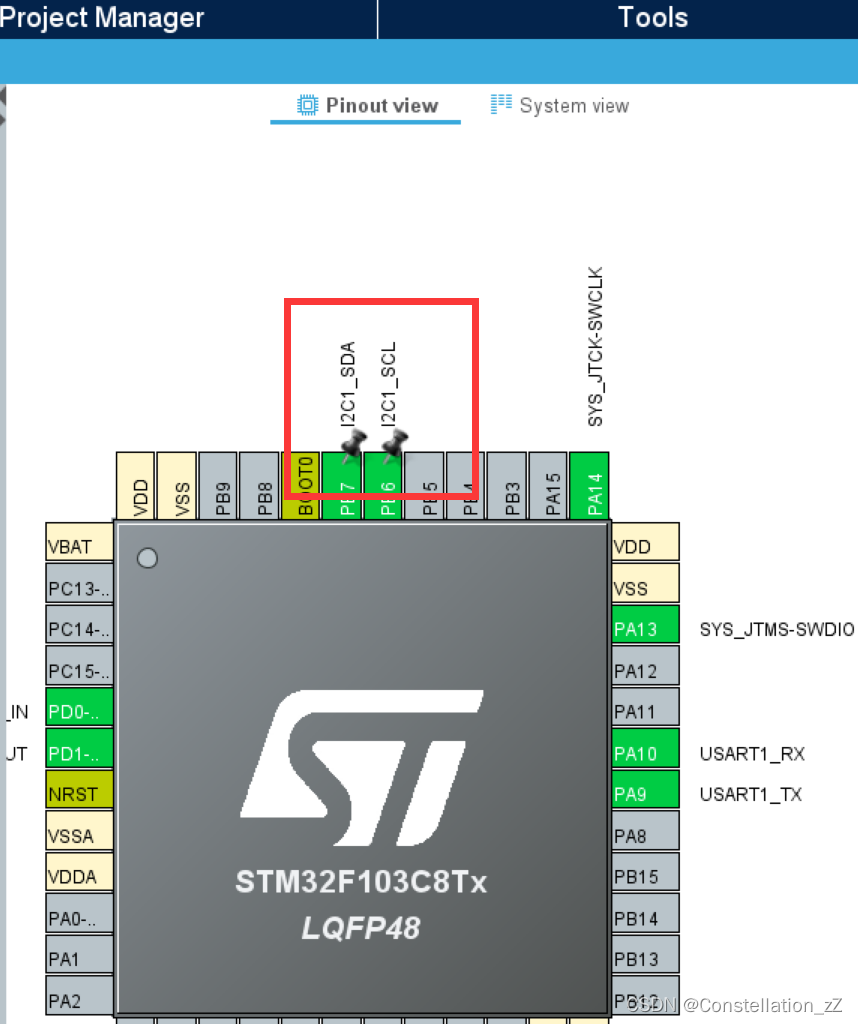
随后我们需要选择两个引脚作为SDA与SCL,我们这里就选择PB6与PB7。
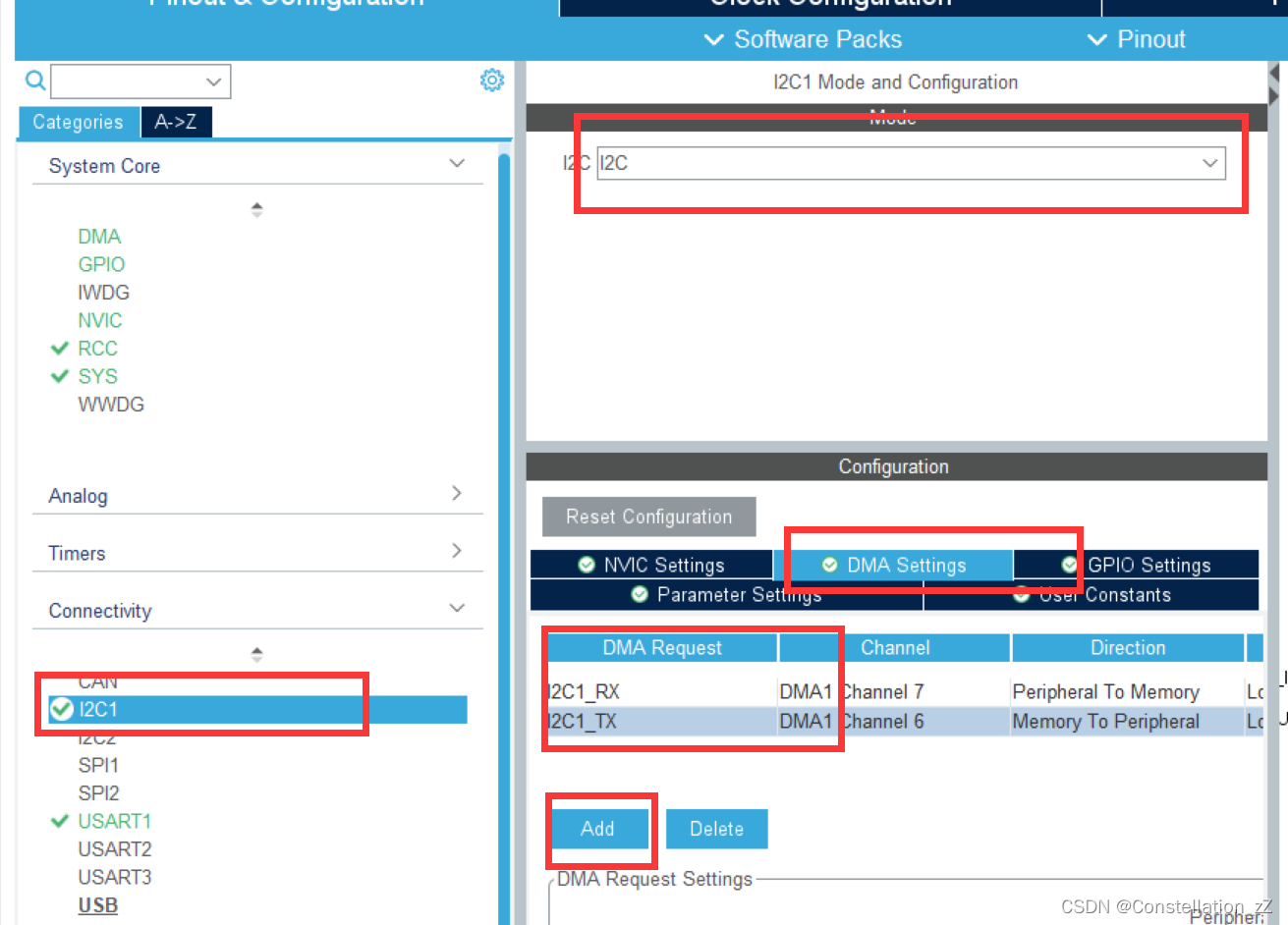
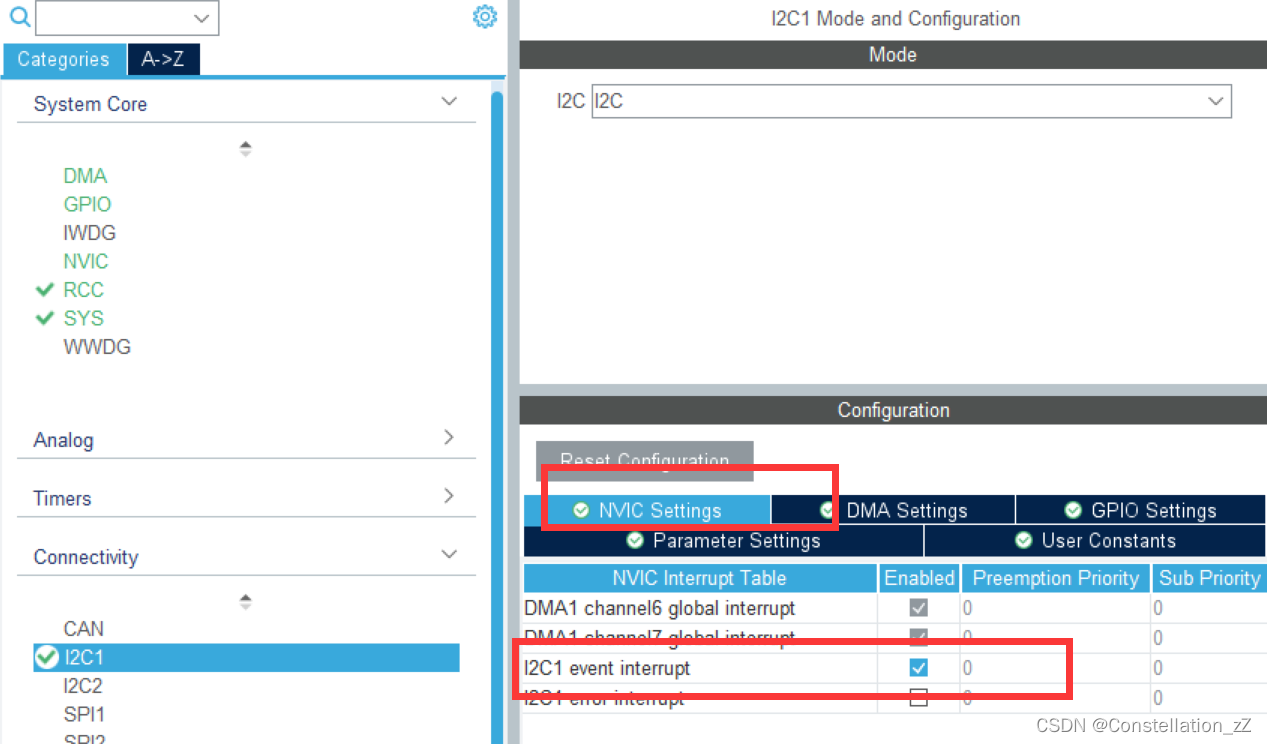
随后,我们点击“I2C1”,打开I2C,并将发送TX和接收RX端口进行配置,并打开I2C事件中断
最后,按照老方法生成工程就好了。这里参考之前的博客
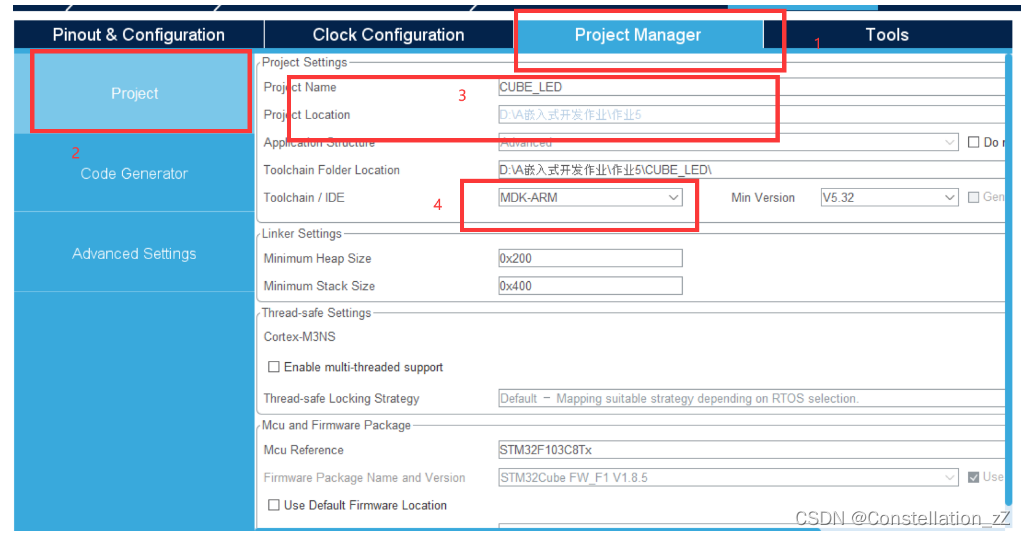
最后我们点击“Project Manager”,设置好我们工程存放的路径,选择“MDK-ARM"方式打开。
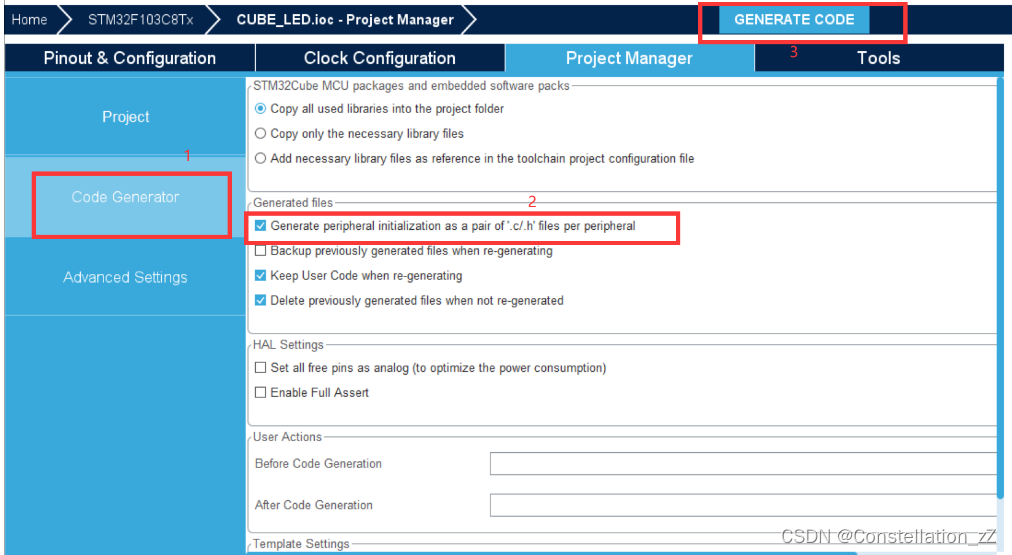
再点击”Code Generator“,勾选以下选项,点击右上角,这样工程就建立好了
四、各函数代码导入与编写
4.1 模块函数导入
生产厂商已给AHT20的配置代码,我们需将其下载并导入到工程当中。
AHT20配置函数链接:
链接:https://pan.baidu.com/s/1846AHdi3J96m_txVhv1ahw?pwd=0231
提取码:0231
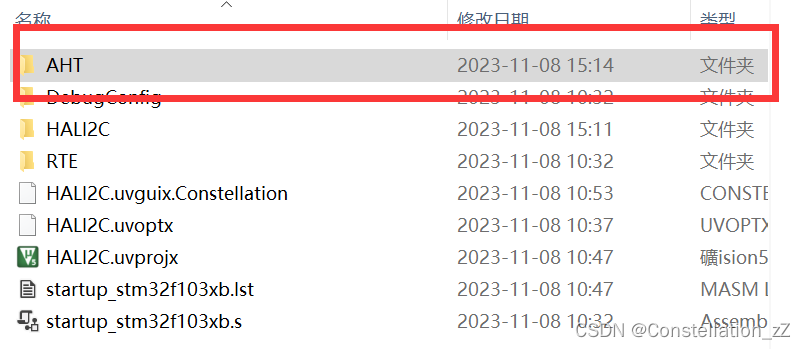
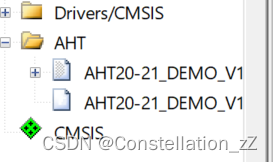
下载好后,我们把AHT这个文件夹粘贴到工程文件目录下
然后我们打开工程,点击三个箱子图案,取名"AHT"。
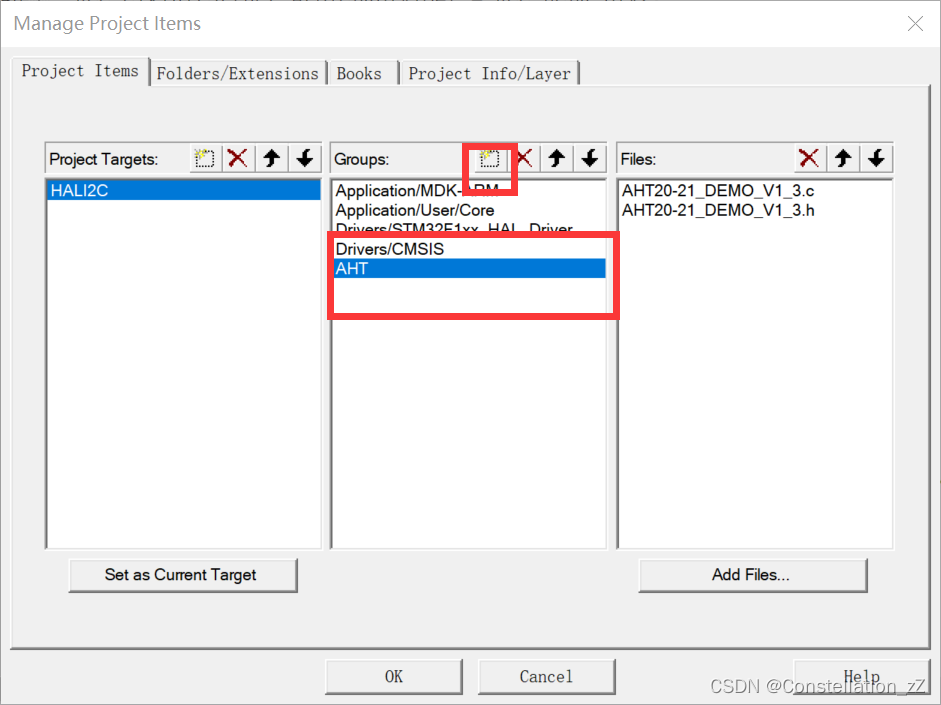
然后将AHT中两个文件加入到AHT组中
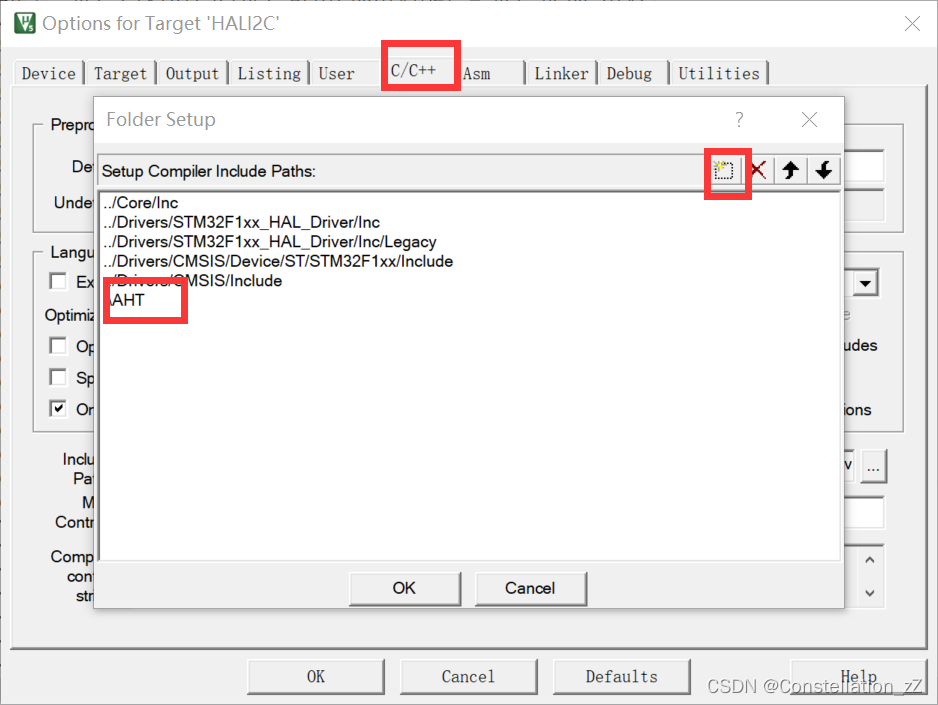
随后点击魔术棒,加入头文件路径“AHT"。
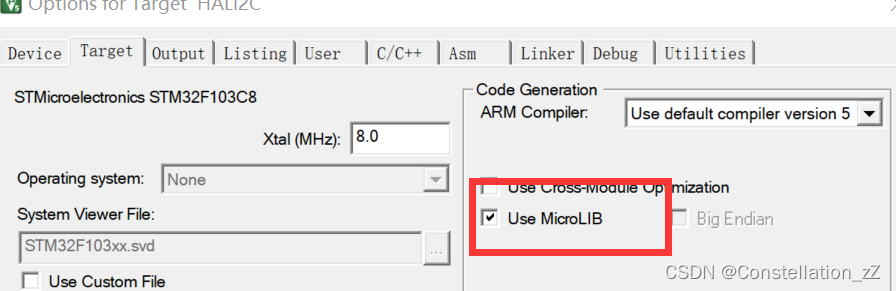
这样基本的导入就做好了,另外还需要在”Target“栏中打开”Use MicroLIB“
4.2 模块函数修改
本次实验使用的是HAL库,故我们先将AHT的c文件进行如下修改:
#include "AHT20-21_DEMO_V1_3.h"
#include "gpio.h"
#include "i2c.h"
void Delay_N10us(uint32_t t)//延时函数
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//延时函数
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //延时函数
{
while(t--)
{
SensorDelay_us(1000);//延时1ms
}
}
//void AHT20_Clock_Init(void) //延时函数
//{
// RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE);
//}
void SDA_Pin_Output_High(void) //将PB7配置为输出 , 并设置为高电平, PB7作为I2C的SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
}
void SDA_Pin_Output_Low(void) //将P7配置为输出 并设置为低电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
}
void SDA_Pin_IN_FLOATING(void) //SDA配置为浮空输入
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;//浮空
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
}
void SCL_Pin_Output_Low(void) //SCL输出低电平
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
}
void Init_I2C_Sensor_Port(void) //初始化I2C接口,输出为高电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
}
void I2C_Start(void) //I2C主机发送START信号
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //往AHT20写一个字节
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//从AHT20读取一个字节
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
//if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)) a=1;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) a=1;
Byte = (Byte<<1)|a;
//SCL_Pin_Output_Low();
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //看AHT20是否有回复ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //主机回复ACK信号
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //主机不回复ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //一条协议结束
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//读取AHT20的状态寄存器
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t AHT20_Read_Cal_Enable(void) //查询cal enable位有没有使能
{
uint8_t val = 0;//ret = 0,
val = AHT20_Read_Status();
if((val & 0x68)==0x08)
return 1;
else return 0;
}
void AHT20_SendAC(void) //向AHT20发送AC命令
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC采集命令
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRC校验类型:CRC8/MAXIM
//多项式:X8+X5+X4+1
//Poly:0011 0001 0x31
//高位放到后面就变成 1000 1100 0x8c
//C现实代码:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //没有CRC校验,直接读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//向AHT10发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_6th = AHT20_RD_Byte();//温度
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC校验后,读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//用于CRC传递数组
AHT20_SendAC();//向AHT10发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC数据
Send_NOT_ACK(); //注意: 最后是发送NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
else
{
ct[0]=0x00;
ct[1]=0x00;//校验错误返回值,客户可以根据自己需要更改
}//CRC数据
}
void AHT20_Init(void) //初始化AHT20
{
Init_I2C_Sensor_Port();
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xa8);//0xA8进入NOR工作模式
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xbe);//0xBE初始化命令,AHT20的初始化命令是0xBE, AHT10的初始化命令是0xE1
Receive_ACK();
AHT20_WR_Byte(0x08);//相关寄存器bit[3]置1,为校准输出
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third;
I2C_Start();
AHT20_WR_Byte(0x70);//原来是0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//延时5ms左右
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);//寄存器命令
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
头文件修改如下:
#ifndef _AHT20_DEMO_
#define _AHT20_DEMO_
#include "main.h"
void Delay_N10us(uint32_t t);//延时函数
void SensorDelay_us(uint32_t t);//延时函数
void Delay_4us(void); //延时函数
void Delay_5us(void); //延时函数
void Delay_1ms(uint32_t t);
void AHT20_Clock_Init(void); //延时函数
void SDA_Pin_Output_High(void) ; //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA
void SDA_Pin_Output_Low(void); //将P15配置为输出 并设置为低电平
void SDA_Pin_IN_FLOATING(void); //SDA配置为浮空输入
void SCL_Pin_Output_High(void); //SCL输出高电平,P14作为I2C的SCL
void SCL_Pin_Output_Low(void); //SCL输出低电平
void Init_I2C_Sensor_Port(void); //初始化I2C接口,输出为高电平
void I2C_Start(void); //I2C主机发送START信号
void AHT20_WR_Byte(uint8_t Byte); //往AHT20写一个字节
uint8_t AHT20_RD_Byte(void);//从AHT20读取一个字节
uint8_t Receive_ACK(void); //看AHT20是否有回复ACK
void Send_ACK(void) ; //主机回复ACK信号
void Send_NOT_ACK(void); //主机不回复ACK
void Stop_I2C(void); //一条协议结束
uint8_t AHT20_Read_Status(void);//读取AHT20的状态寄存器
uint8_t AHT20_Read_Cal_Enable(void); //查询cal enable位有没有使能
void AHT20_SendAC(void); //向AHT20发送AC命令
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num);
void AHT20_Read_CTdata(uint32_t *ct); //没有CRC校验,直接读取AHT20的温度和湿度数据
void AHT20_Read_CTdata_crc(uint32_t *ct); //CRC校验后,读取AHT20的温度和湿度数据
void AHT20_Init(void); //初始化AHT20
void JH_Reset_REG(uint8_t addr);///重置寄存器
void AHT20_Start_Init(void);///上电初始化进入正常测量状态
#endif
4.3 主函数编写
打开工程的”main.c“,写入以下代码
#include "main.h"
#include "dma.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include<stdio.h>
#include "AHT20-21_DEMO_V1_3.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
uint32_t CT_data[2]={0,0};
volatile int c1,t1;
Delay_1ms(500);
HAL_Init();
SystemClock_Config();
MX_USART1_UART_Init();
MX_DMA_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
AHT20_Init();
Delay_1ms(500);
while (1)
{
AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据
c1 = CT_data[0]*1000/1024/1024; //计算得到湿度值c1(放大了10倍)
t1 = CT_data[1]*2000/1024/1024-500;//计算得到温度值t1(放大了10倍)
printf("正在检测");
HAL_Delay(100);
printf("\r\n");
HAL_Delay(1000);
printf("温度:%d%d.%d",t1/100,(t1/10)%10,t1%10);
printf("湿度:%d%d.%d",c1/100,(c1/10)%10,c1%10);
printf("\r\n");
HAL_Delay(1000);
printf("等待");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
HAL_Delay(100);
printf(".");
printf("\r\n");
HAL_Delay(1000);
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
五、烧录结果及演示
5.1 硬件连接方式
厂商给出了硬件连接方式
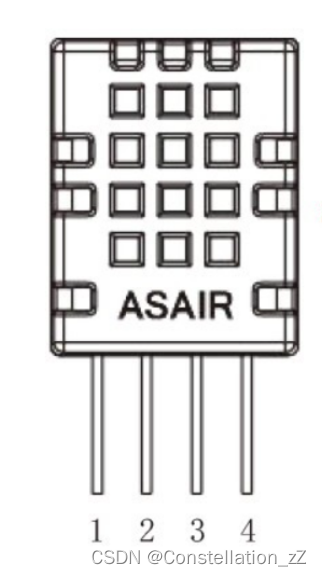
| 引脚 | 名称 | 备注 |
|---|---|---|
| 1 | VDD(2.2~5.5V) | 接单片机3.3V |
| 2 | SDA | 接单片机PB7 |
| 3 | GND | 接地 |
| 4 | SCL | 接单片机PB6 |
5.2 烧录结果
六、总结
通过本次实验,已经基本了解I2C的通信协议,了解了基本的I2C的通信模式和基本时序单元规则,如何触发、读写以及终止等指令,对老师所给的新型模块也有基本的认识与了解。虽然对具体的原理了解不深,但能够通过基本的SDA和SCL引脚对模块进行控制和读取数据。总而言之这次试验收获还是很大的,也让我觉得HAL库是越来越简单。
七、参考
STM32F103通过IIC协议实现温湿度(AHT20)的采集_aht20例程_Justinlevy的博客-CSDN博客














 4945
4945











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









