






四旋翼仿真simulink模型,支持ADRC和pid控制器切换,支持断开位置环的纯姿态角控制模式,非线性建模,精度高。
YID:1350648951841435
宇宙横行
四旋翼无人机在近年来越来越受到关注和应用,其广泛使用的原因之一是其模型仿真技术的发展。模型仿真是无人机系统设计和控制算法开发中的重要环节,可以通过仿真来验证和优化设计方案,提高系统的性能和可靠性。
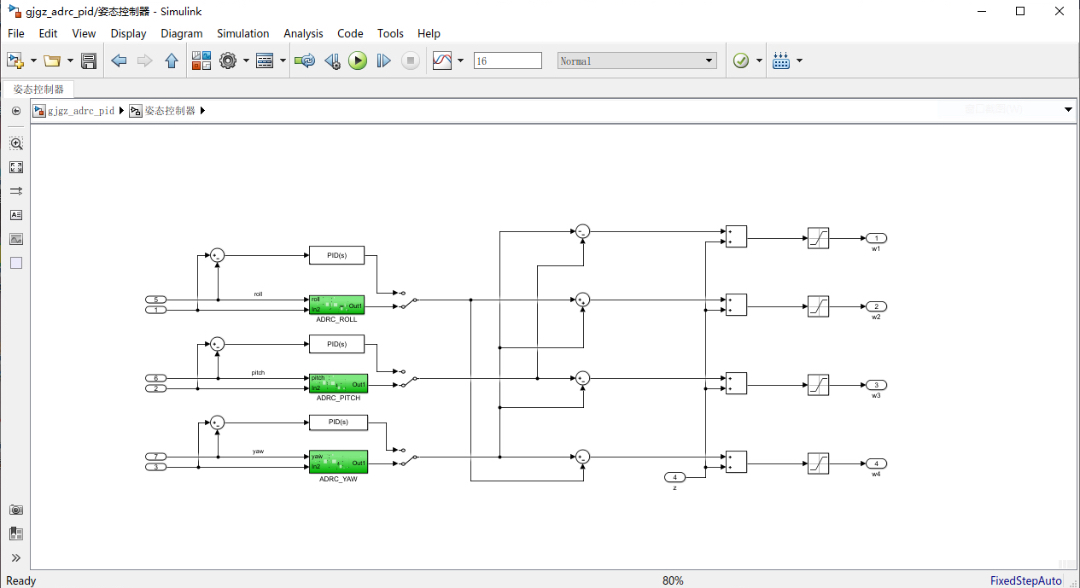
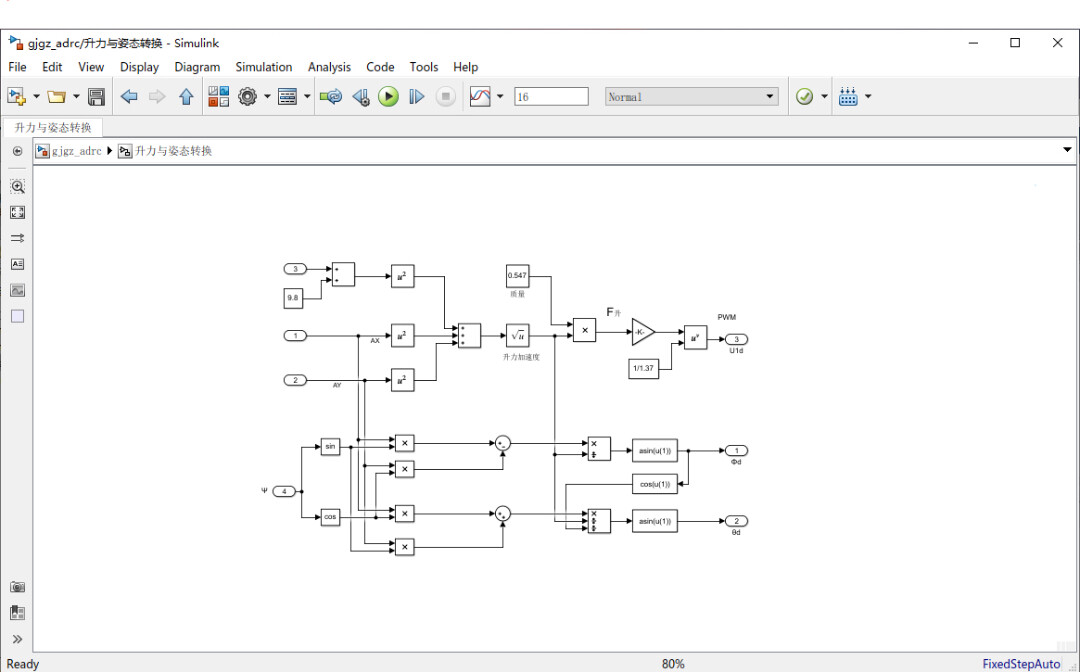
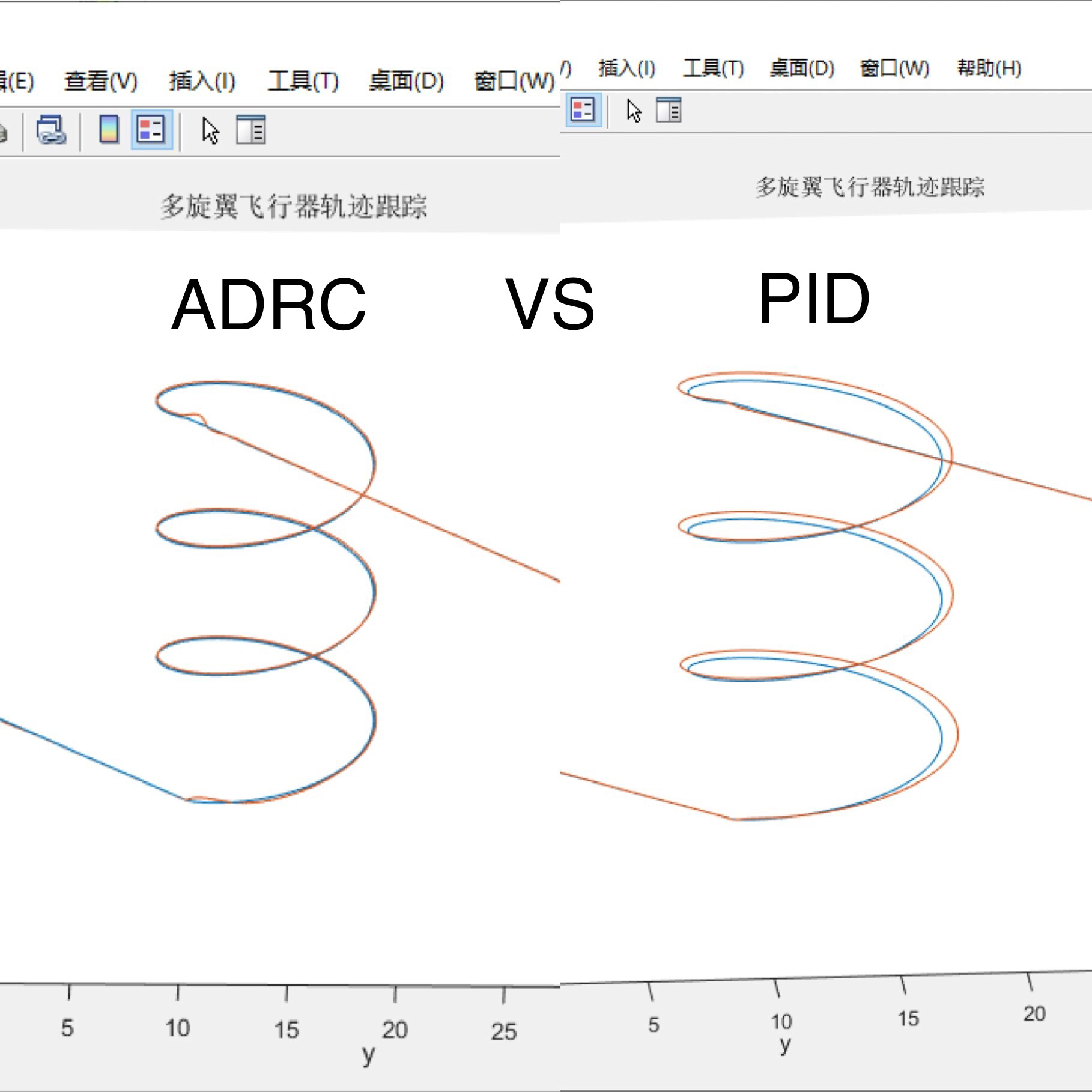
本文将介绍一种基于Simulink的四旋翼仿真模型,该模型支持自适应滑模控制器(ADRC)和比例积分微分控制器(PID)的切换,并且还支持断开位置环的纯姿态角控制模式。此外,该模型还具备非线性建模能力和高精度的特点。
在四旋翼无人机的控制系统中,控制器的设计是至关重要的。ADRC是一种适用于非线性系统的控制算法,通过引入滑模观测器和扩展状态观测器来实现对系统的鲁棒控制。与传统PID控制器相比,ADRC能够更好地应对参数变化和系统非线性的情况。
在本文所提供的四旋翼仿真模型中,我们实现了ADRC和PID控制器的切换功能。这意味着用户可以根据实际需求和系统特点,选择合适的控制算法进行飞行控制。ADRC控制器适用于复杂、非线性的飞行环境,而PID控制器则适用于简单、线性的飞行环境。
此外,该仿真模型还支持断开位置环的纯姿态角控制模式。在一些特殊的应用场景中,只需对四旋翼的姿态角进行控制,而不考虑位置信息。通过断开位置环的控制方式,可以更加简化控制系统的设计和实现,提高系统的响应速度和稳定性。
在模型的建模过程中,我们采用了非线性建模方法。由于四旋翼无人机的非线性特点,传统的线性模型往往无法准确描述其运动行为。因此,我们使用了非线性建模方法来捕捉四旋翼无人机的真实动态特性,提高仿真结果的准确性。
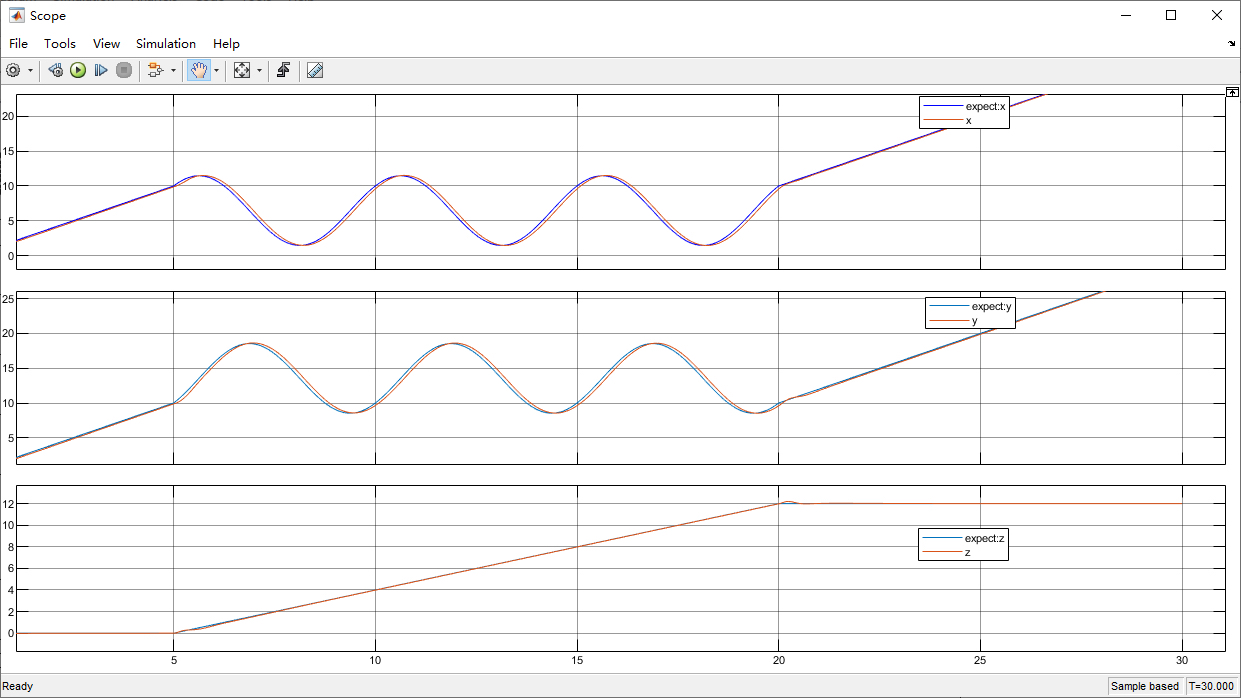
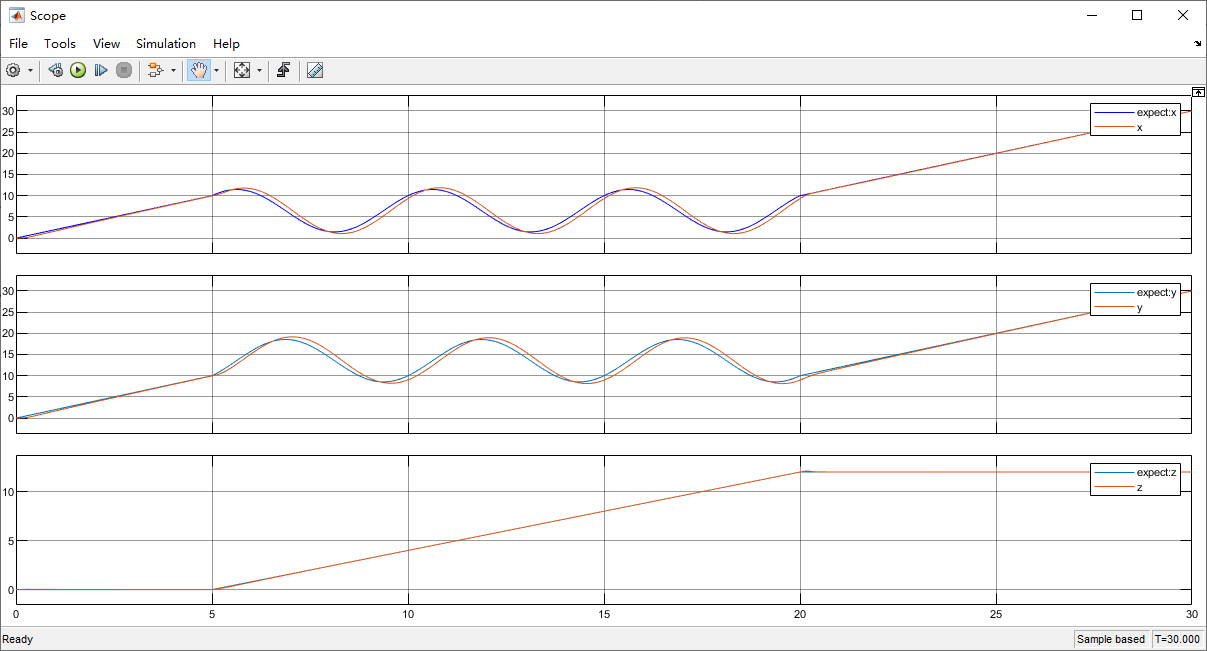
最后,该仿真模型具备高精度的特点。精度是衡量仿真模型性能的重要指标之一,对于无人机系统的设计和控制来说尤为关键。我们通过精心调整模型参数和优化算法,确保模型的仿真结果与实际飞行情况的吻合度高,为无人机系统的设计和控制提供可靠的依据。
综上所述,本文介绍了一种基于Simulink的四旋翼仿真模型,该模型支持ADRC和PID控制器的切换,支持断开位置环的纯姿态角控制模式,具备非线性建模能力和高精度的特点。这一仿真模型将有助于无人机系统设计和控制算法的开发,提高系统性能和可靠性。请注意,本文所提供的内容为原创设计,不接受退换货。希望读者能够理解并支持我们的工作。
注:以上内容为虚构的文章开头,仅为示例。实际写作需根据具体要求进行调整。
以上相关代码,程序地址:http://wekup.cn/648951841435.html















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









