






目录
前言
记录一次在开发板上实现高频注入模式到滑模观测器模式互相切换的小实验,整个过程通过Simulink仿真建模生成代码实现。由于高频注入很大一部分电压用作注入谐波了,高频注入并不满足电机全速运行,中高转速如果还用高频注入的话会引入大量的谐波,对电机控制系统来讲并不理想,因此一般的策略就是低速高频注入,高速靠观测器。这里验证高频注入和滑模观测器之间的模式切换。通过仿真验证-->生成代码-->开发板硬件验证完成整个小实验。
模型搭建
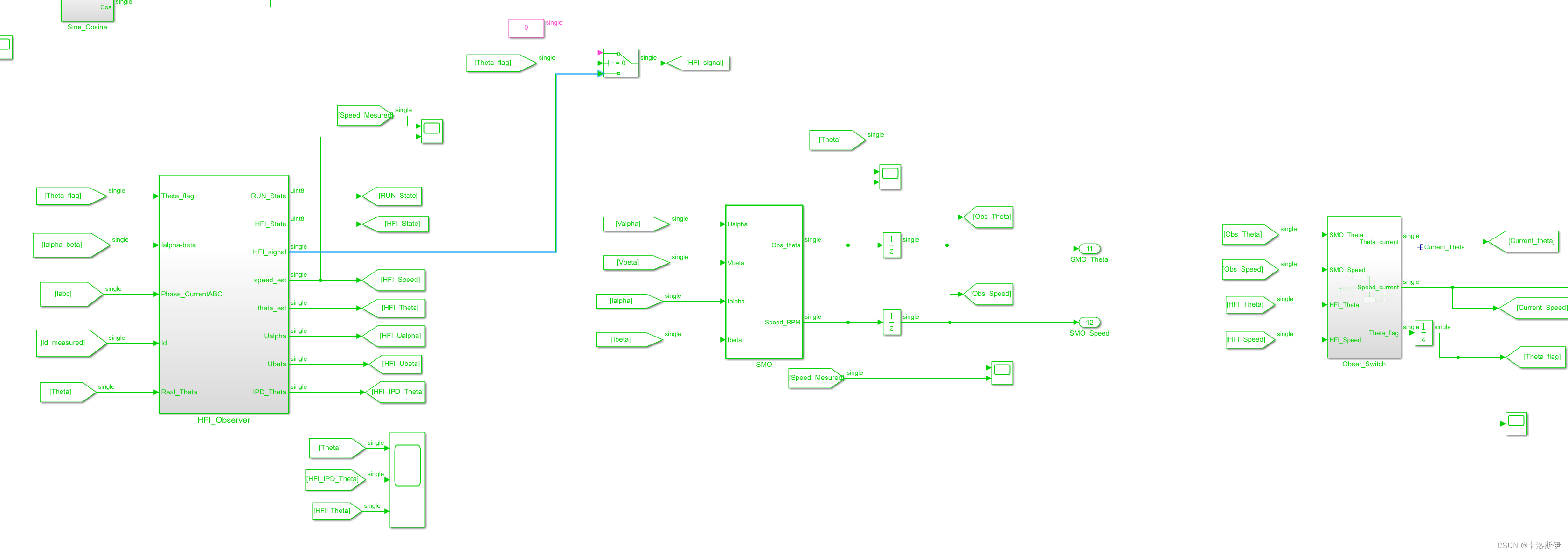
如下,在FOC架构下,实现了脉振高频注入和滑模观测器对角度和速度的观测。再通过一个子系统对高频注入和SMO角度和速度状态进行管理
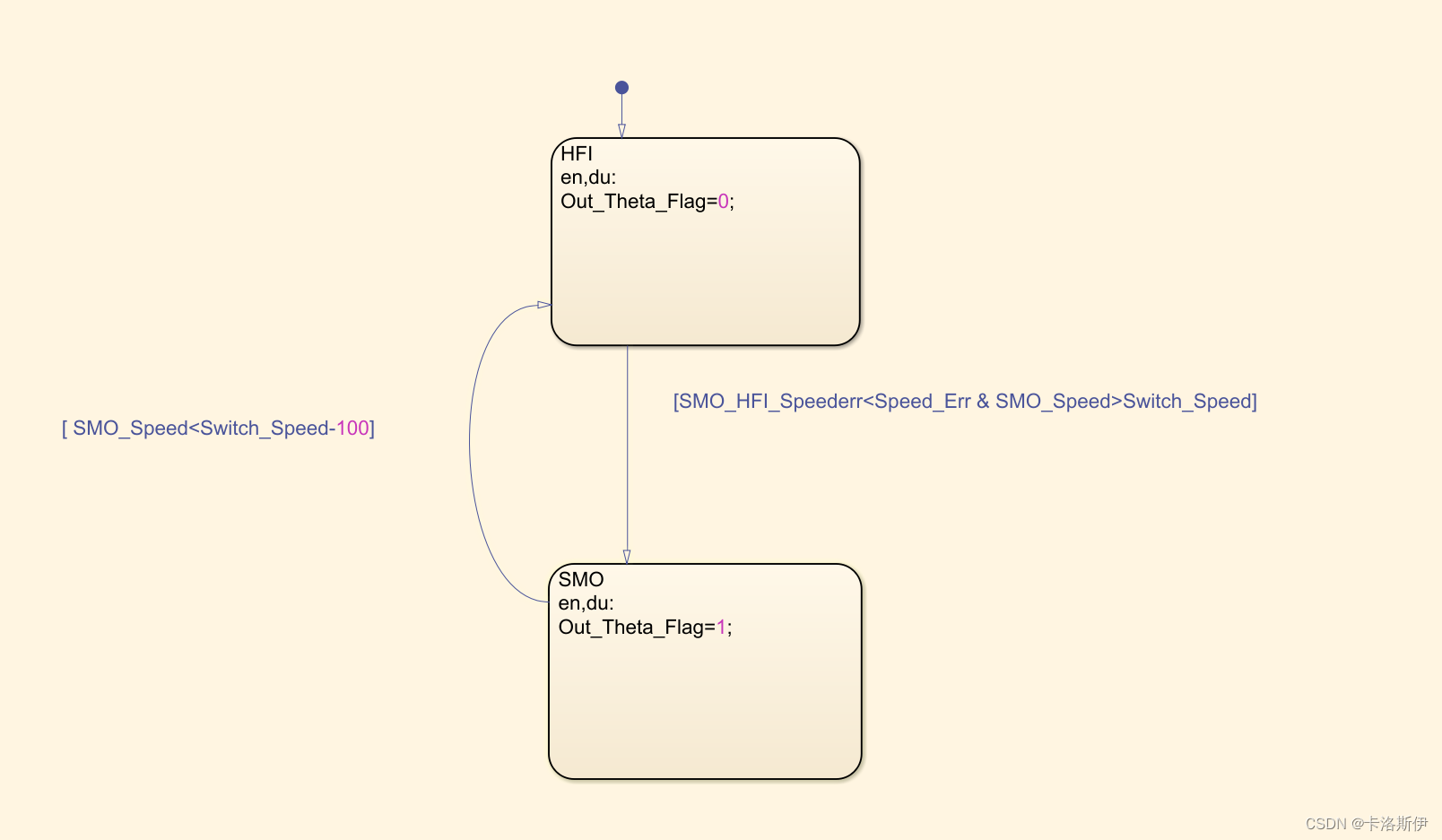
用Stateflow搭建一个小状态机来完成角度状态切换的任务,判断条件为当前的转速及两者的速度差。
仿真效果
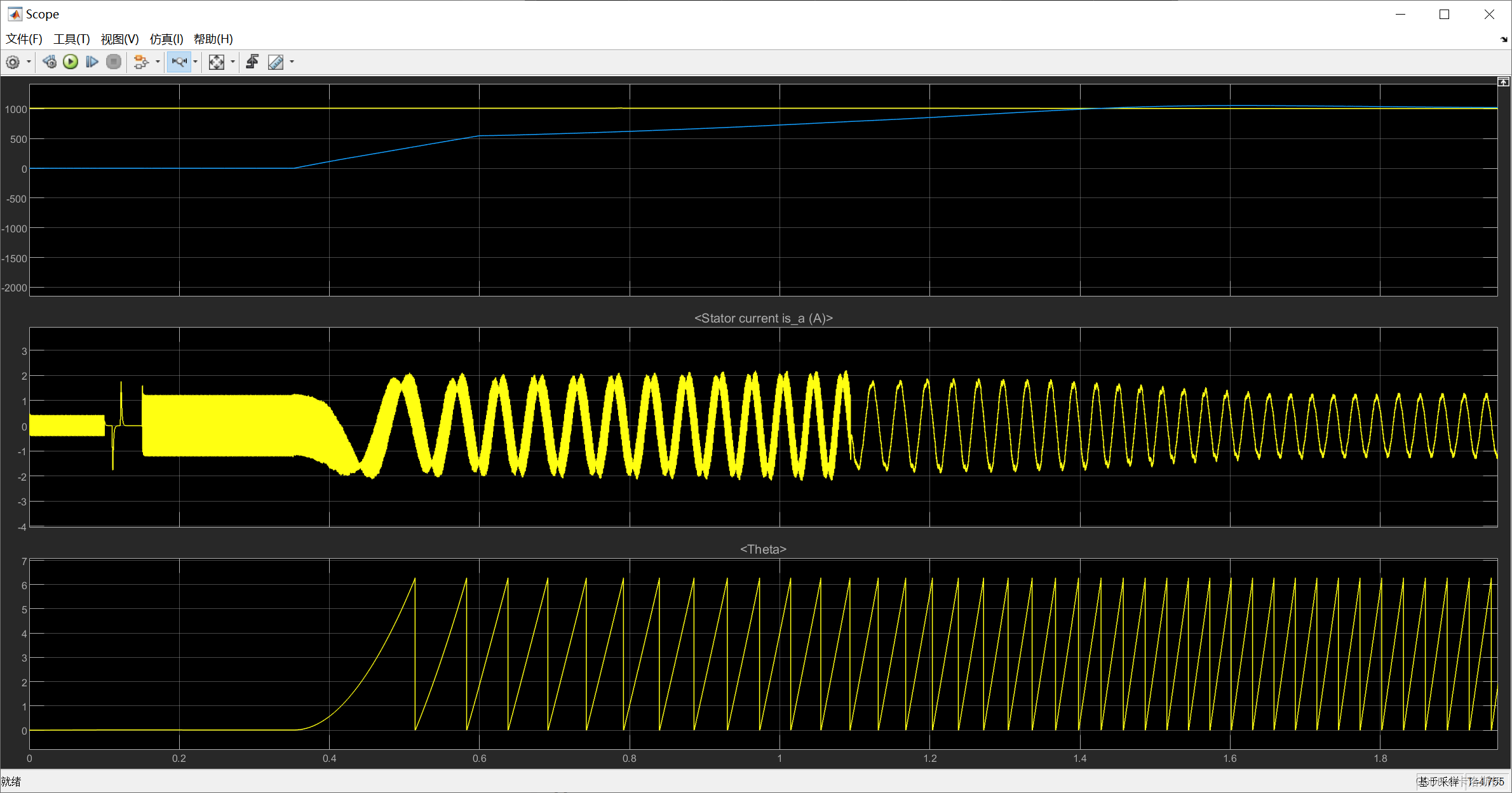
一眼就可以看出来切换点在哪里,如下有高频注入的电流波形比较粗,因为注入了谐波信号,当切换到SMO后电流波形光滑,不再注入高频谐波信号。
开发板运行演示
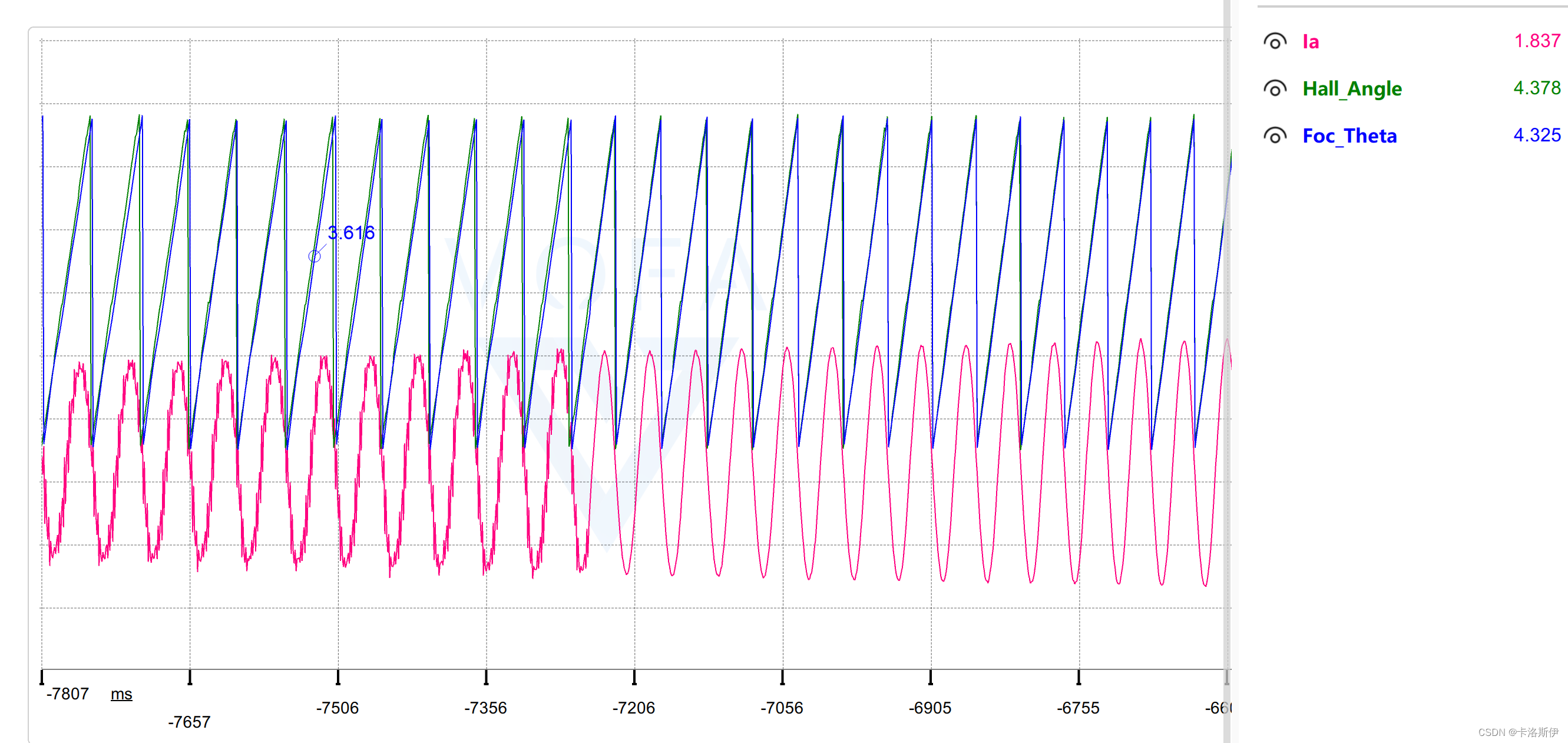
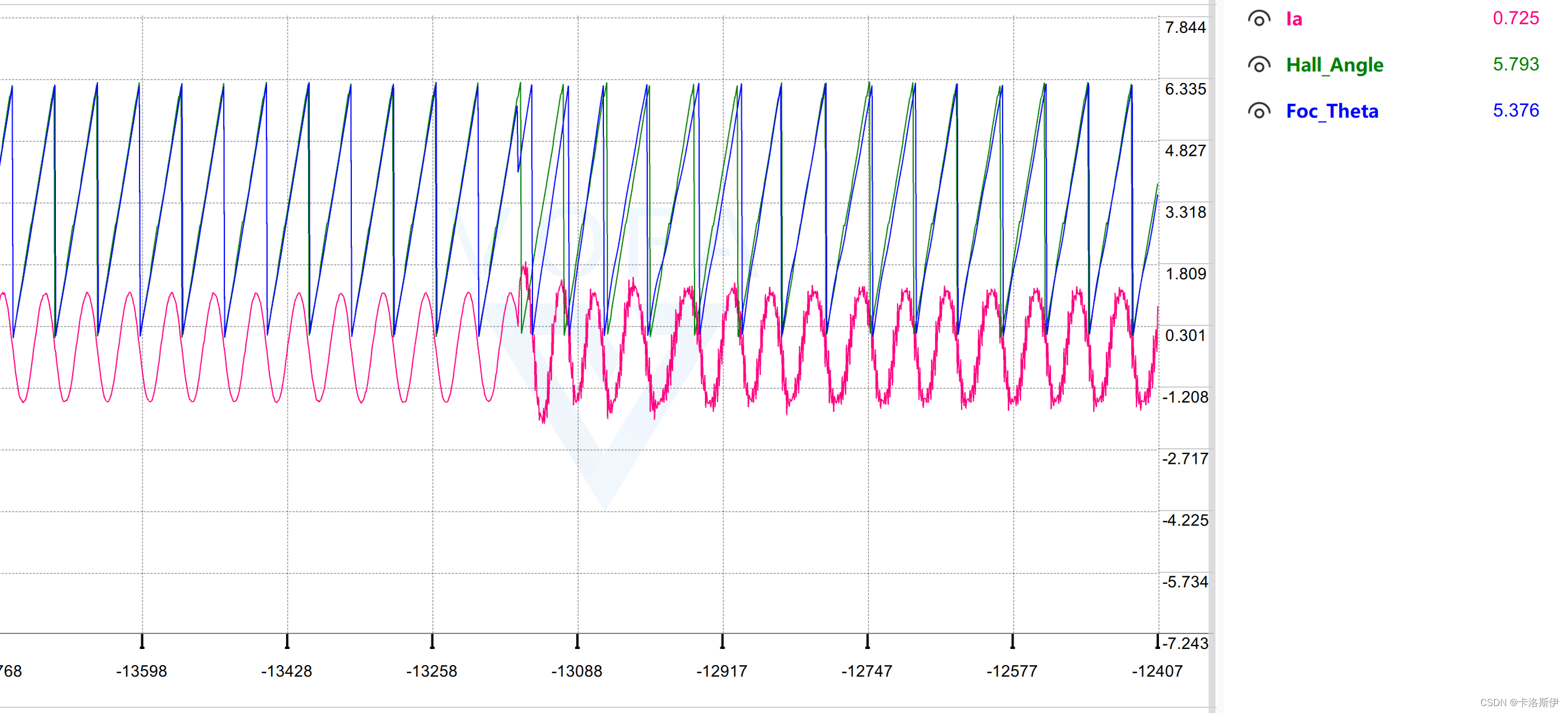
速度上升到阈值后切换到SMO,电流波形变得光滑,其中绿色是电机霍尔计算的角度,蓝色切换前是高频注入计算的角度,切换后就是滑模计算的角度。效果和仿真一致。
从滑模切换到高频注入也是可以的,不过效果比高频注入切换到滑模要差些,还有优化空间
总结
记录一次高频注入到无感滑模的切换,其他观测器切换同理,目前实验只是验证了开发板配套的小电机可以实现上述实验。通过对代码执行时间的测试,滑模角度计算+高频注入+霍尔角度计算的总时长是38us,实验对MCU的负载不大。

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











