






多机器人协同编队避障算法;人工势场算法;动态窗口算法
ID:3699701169487514
诚信第一
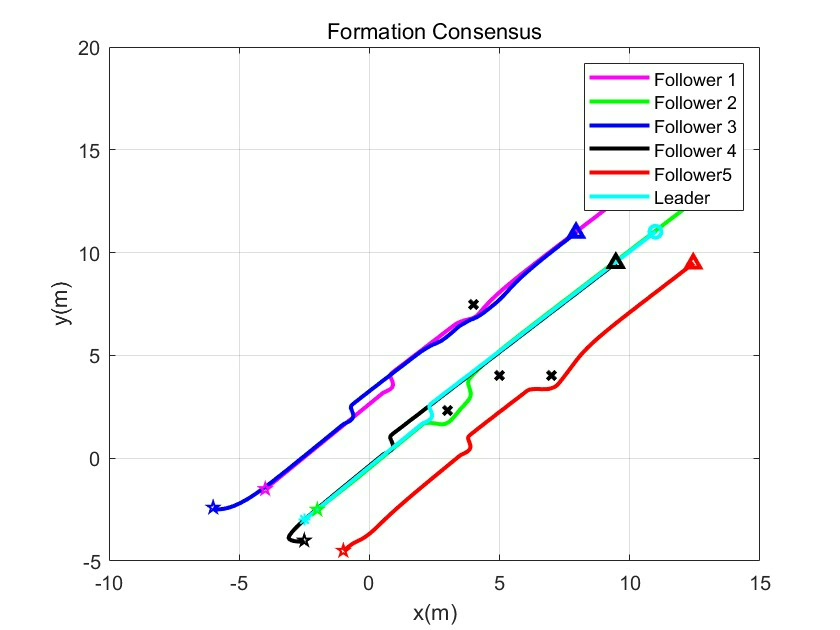
多机器人协同编队避障算法是指通过多台机器人之间的协作,实现在未知环境中进行避障的算法。在现实世界中,机器人通常需要在未知的环境中自主导航和避免障碍物,以完成各种任务。然而,单个机器人面对复杂的环境时可能面临诸多挑战,例如,感知误差、局部最小问题,以及无法获取全局信息等。为了应对这些问题,多机器人协同编队避障算法应运而生。
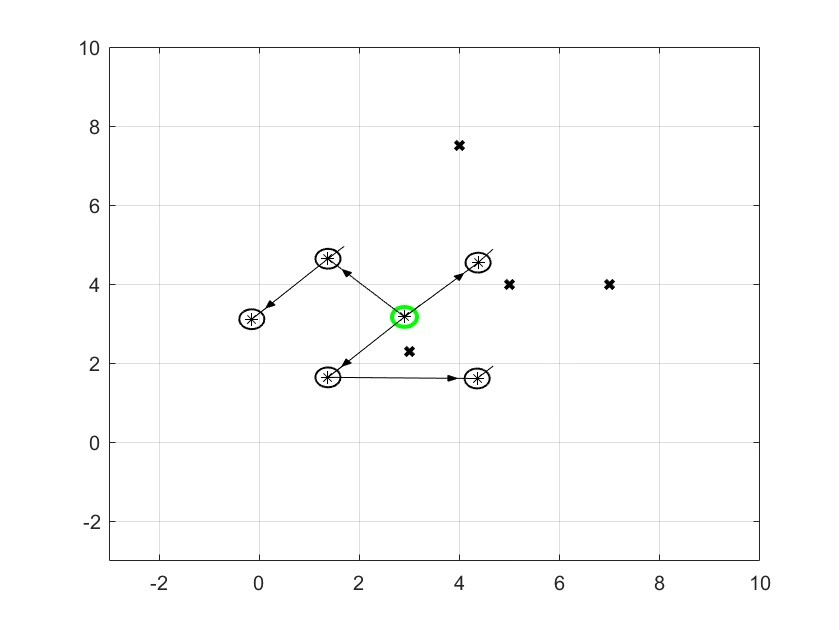
人工势场算法是一种常用的多机器人协同编队避障算法。该算法通过将机器人视为带电粒子,将环境分解为带电粒子产生的势场,从而实现机器人的导航和避障。具体而言,每个机器人都被赋予一个正电荷和一个负电荷,他们之间的排斥力使得机器人相互之间保持一定的距离,而机器人与障碍物之间的引力使机器人趋向于避开障碍物。通过这种方式,机器人可以在未知环境中快速、高效地进行导航和避障。
然而,传统的人工势场算法存在一些问题。首先,机器人之间的排斥力和机器人与障碍物之间的引力容易导致机器人陷入局部最小点,从而无法找到全局最优路径。其次,人工势场算法缺乏对动态环境的适应性,例如,当障碍物的位置发生变化时,算法无法及时调整机器人的路径。为了解决这些问题,动态窗口算法被提出并得到了广泛应用。
动态窗口算法是一种基于启发式搜索的多机器人协同编队避障算法。该算法通过在每个机器人的前方维护一个动态窗口,即一组可行的速度和转向范围,来指导机器人的运动。在每个时间步骤中,机器人通过计算各种速度和转向的得分来选择最佳移动方向,并根据当前的环境信息进行实时调整。通过不断更新动态窗口,机器人能够灵活地应对环境的变化,并实现高效、安全的导航和避障。
综上所述,多机器人协同编队避障算法在现实世界中的机器人导航和避障任务中起着重要作用。人工势场算法和动态窗口算法是常用的两种算法。人工势场算法通过将机器人视为带电粒子,利用排斥力和引力来导航和避障。然而,传统的人工势场算法存在局部最小点和动态环境适应性差的问题。为了解决这些问题,动态窗口算法被提出并应用广泛。动态窗口算法通过维护一个动态窗口来实现机器人的灵活运动,并根据当前环境信息进行实时调整。多机器人协同编队避障算法的发展为机器人在未知环境中的导航和避障提供了新的思路和方法,同时也为未来机器人技术的发展提供了重要的参考。
【相关代码,程序地址】:http://fansik.cn/701169487514.html
















 9549
9549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









