






多智能体编队与避障
#人工势场#多智能体#编队#避障#拓扑结构#队形变换
近年来,随着无人机、机器人和智能车等领域的迅速发展,多智能体系统的研究日益受到关注。多智能体编队是其中的一个重要研究方向,它涉及到多个智能体之间的协同工作和通信。而在多智能体编队中,避障是一个必不可少的关键问题。本文将围绕多智能体编队与避障展开讨论,介绍人工势场方法以及拓扑结构与队形变换技术,并探讨其在实践中的应用。
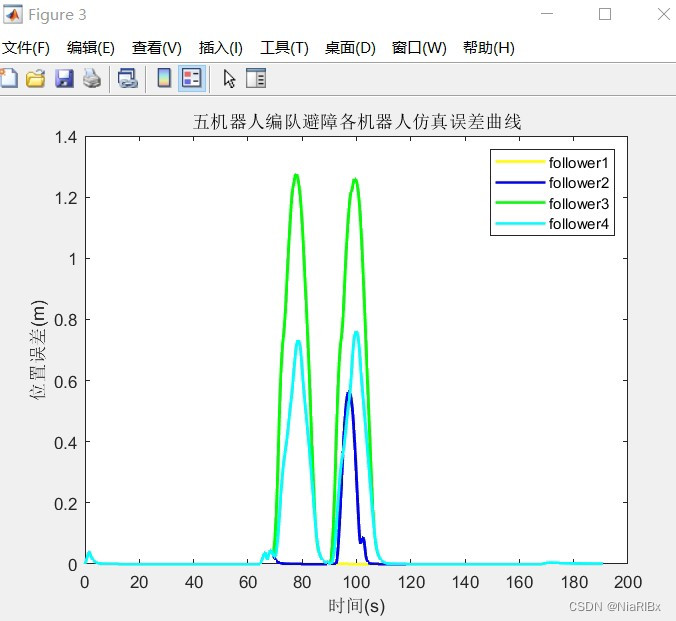
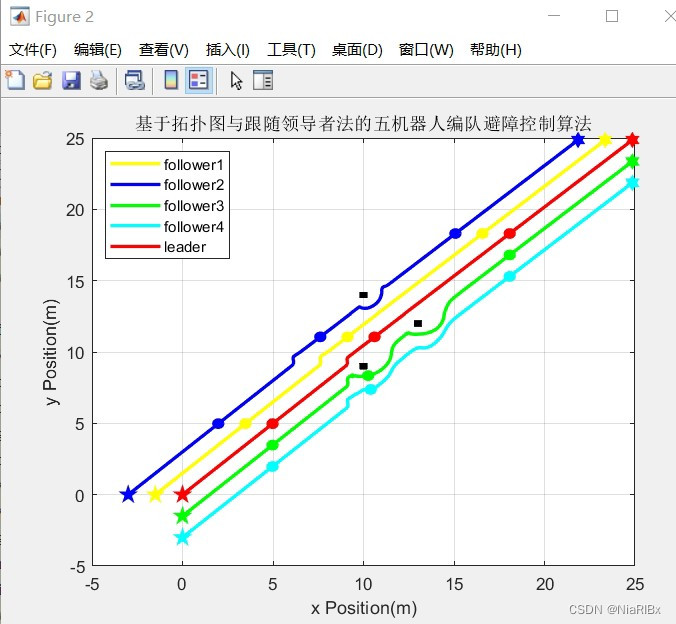
首先,我们来介绍人工势场方法。人工势场方法是一种常用的多智能体编队与避障方法。它借鉴于物理学中的势场概念,将智能体看作粒子,在环境中构建一个势场。其中,每个智能体会感知周围的障碍物,并根据障碍物的位置和属性计算出对应的斥力。同时,为了使智能体之间保持一定的距离或形成特定的队形,还可以在智能体之间增加引力或相互作用力。通过斥力和引力之间的综合作用,智能体就能够在整个环境中进行自主的导航和规避障碍物。人工势场方法简单直观,容易实现,并且能够适应不同类型的环境和任务。
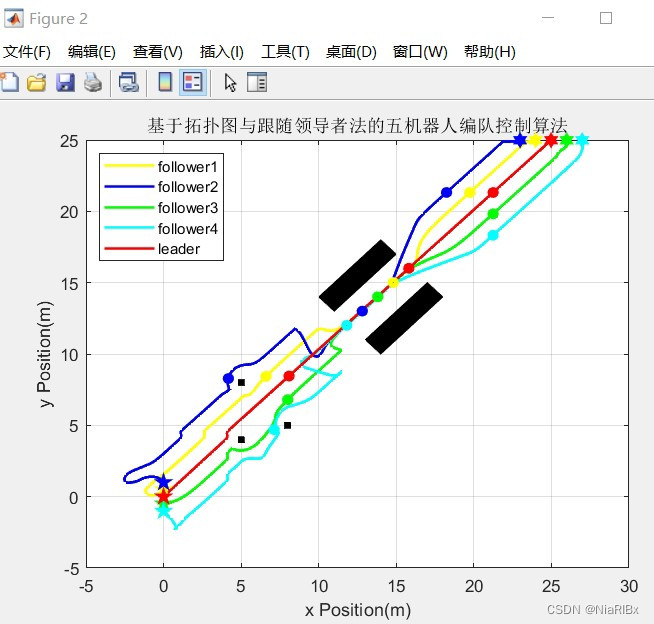
其次,我们来讨论拓扑结构与队形变换技术。在多智能体编队中,拓扑结构和队形变换是实现协同工作的重要手段。拓扑结构是指智能体之间的连接关系,它可以是环形、星形、网状等各种形式。拓扑结构的选择会直接影响到编队系统的性能和稳定性。而队形变换是指智能体在运动过程中,根据任务需要改变编队形态的能力。队形变换可以是平移、旋转、扩展或收缩等操作,通过灵活的队形变换,智能体可以适应不同的工作环境和任务需求。在实践中,拓扑结构与队形变换技术可以相互结合,实现智能体之间的紧密协作和高效通信。
在实际应用中,多智能体编队与避障技术具有广泛的应用前景。例如,在无人机编队飞行中,通过多智能体编队与避障技术,可以实现无人机之间的协同任务执行,提高工作效率和安全性。此外,在智能车辆领域,多智能体编队与避障技术可以帮助车辆在复杂的道路环境中实现安全驾驶和自主导航。同时,多智能体编队与避障技术还可以应用于救援任务、物流配送、农业作业等多个领域,为实现智能化和自动化提供技术支持。
综上所述,多智能体编队与避障是一个具有广泛研究价值和应用潜力的领域。人工势场方法以及拓扑结构与队形变换技术是其中的重要研究内容。通过这些方法和技术,可以实现智能体之间的协同工作和通信,提高编队系统的性能和稳定性。未来,随着人工智能和机器学习等技术的不断发展,多智能体编队与避障技术将会得到更进一步的突破和应用。
注:以上内容仅为作者个人观点,不代表本文的综合结论和最终结论。
相关代码,程序地址:http://imgcs.cn/lanzoun/755467373543.html


















 1597
1597

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









