






 本文详细描述了如何利用Carsim2019.0和MatlabSimulink2021a设计AEB仿真算法,采用模块化方法处理控制逻辑,特别适合直线驾驶工况。文章涵盖了控制算法综述、模块详解以及实际应用测试,为AEB设计者提供实用参考。
本文详细描述了如何利用Carsim2019.0和MatlabSimulink2021a设计AEB仿真算法,采用模块化方法处理控制逻辑,特别适合直线驾驶工况。文章涵盖了控制算法综述、模块详解以及实际应用测试,为AEB设计者提供实用参考。
AEB联合仿真算法设计
软件使用:Carsim2019.0+Matlab Simulink2021a
适用场景:采用模块化建模方法,搭建AEB仿真算法,适用于直线驾驶工况场景。
包含模块:Carsim模块,function函数逻辑模块,每个模块的详细数据都可在simulink当中实时查看。
包含:Matlab Simulink源码文件,详细建模说明文档,对应参考资料及相关文献

AEB联合仿真算法设计
摘要:本文从多年的建模工作经验出发,对无人驾驶车辆的多种控制算法进行了综合分析和设计,主要包括PID、滑模、LQR和MPC等控制方法。同时,本文还介绍了适用于直线驾驶工况场景的AEB仿真算法的模块化建模方法,并提供了Carsim2019.0+Matlab Simulink2021a软件的使用说明、模型的详细介绍和相应的参考资料。本文旨在为需要进行AEB仿真算法设计的工程师和研究人员提供参考,并欢迎对本文感兴趣的同行和学生进行进一步的交流和咨询。
关键词:AEB;仿真算法;建模工作;控制算法;模块化建模;直线驾驶工况
1. 引言
随着无人驾驶技术的不断发展,自动紧急制动系统(AEB)作为一种重要的安全辅助系统被广泛应用于汽车行业。AEB系统能够根据车辆周围的环境信息实时监测车辆与前方障碍物的距离和速度,并在发现潜在碰撞风险时自动启动制动系统,以减少事故发生的可能性。为了提高AEB系统的性能和可靠性,设计一种有效的仿真算法非常重要。
2. 相关工作
2.1 控制算法综述
本文从PID到滑膜,从LQR到MPC等控制方法进行了综述和分析。PID控制算法是一种经典的控制方法,具有简单、稳定的特点,广泛应用于工业控制领域。滑模控制算法在非线性系统控制中具有很好的性能,能够处理模型不确定性和外部干扰。LQR控制算法是一种基于最优控制理论的控制方法,通过最小化系统状态和控制信号的加权和来实现系统的最优控制。MPC控制算法是一种基于模型的预测控制方法,通过预测未来一段时间内的系统状态和控制信号来优化控制性能。
2.2 AEB系统设计
AEB系统的设计主要包括传感器系统、环境感知、决策算法和制动系统等方面。传感器系统用于感知车辆周围的环境信息,包括雷达、摄像头、激光雷达等传感器。环境感知算法用于对传感器数据进行处理和分析,提取车辆与前方障碍物之间的距离和速度等关键信息。决策算法根据环境感知结果和系统预设的规则,自动判断是否启动制动系统。制动系统负责实际控制车辆的制动力,并确保车辆在紧急情况下能够及时停下。
3. AEB仿真算法设计
3.1 模块化建模方法
本文采用模块化建模方法搭建AEB仿真算法,该方法能够将系统分解为多个模块,并分别对每个模块进行建模和调试。主要包括Carsim模块和function函数逻辑模块两个部分。Carsim模块用于建立车辆动力学模型和环境模型,通过设定车辆的初始状态和环境参数来模拟不同的驾驶场景。function函数逻辑模块用于编写AEB算法的逻辑和控制策略,并与Carsim模块进行数据交互和实时监控。
3.2 模型详细说明
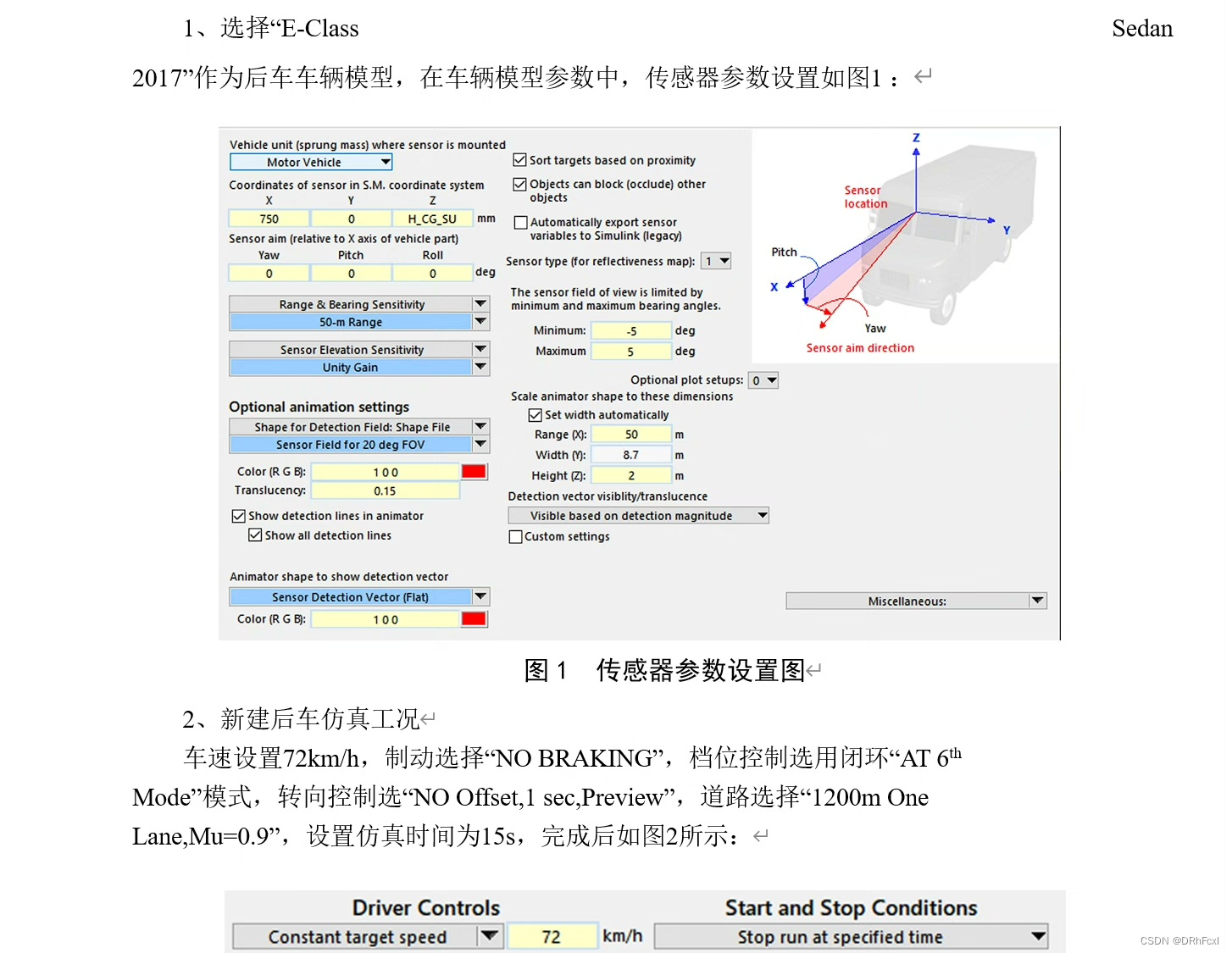
本文提供了Carsim2019.0+Matlab Simulink2021a软件的使用说明,并对AEB仿真算法的模型进行了详细说明。包括传感器模块、环境感知模块、决策模块和制动系统模块等几个主要模块的功能和实现方法。其中传感器模块用于获取车辆周围环境的感知信息,环境感知模块用于对传感器数据进行处理和分析,决策模块用于根据环境感知结果判断是否启动制动系统,制动系统模块用于实际控制车辆的制动力。
4. 结果与讨论
本文设计的AEB仿真算法在直线驾驶工况场景下进行了测试,并得到了良好的效果。通过对模型的实时监控和数据分析,可以得到车辆与前方障碍物之间的距离和速度等关键信息,并能及时启动制动系统以保证车辆的安全行驶。同时,本文还提供了相应的参考资料和相关文献,以便读者进一步学习和研究。
5. 结论
本文围绕AEB联合仿真算法设计展开了详细的介绍和分析。通过对多种控制算法的综述和对AEB系统的设计进行了深入研究,提出了一种模块化建模方法,搭建了适用于直线驾驶工况场景的AEB仿真算法模型。通过对模型的测试和分析,验证了算法的有效性和可行性。本文的研究成果为AEB仿真算法的设计和优化提供了重要的参考和指导,并为后续研究提供了参考和借鉴。
相关代码,程序地址:http://imgcs.cn/lanzoun/753139489210.html















 589
589











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









