








请求给到ESC
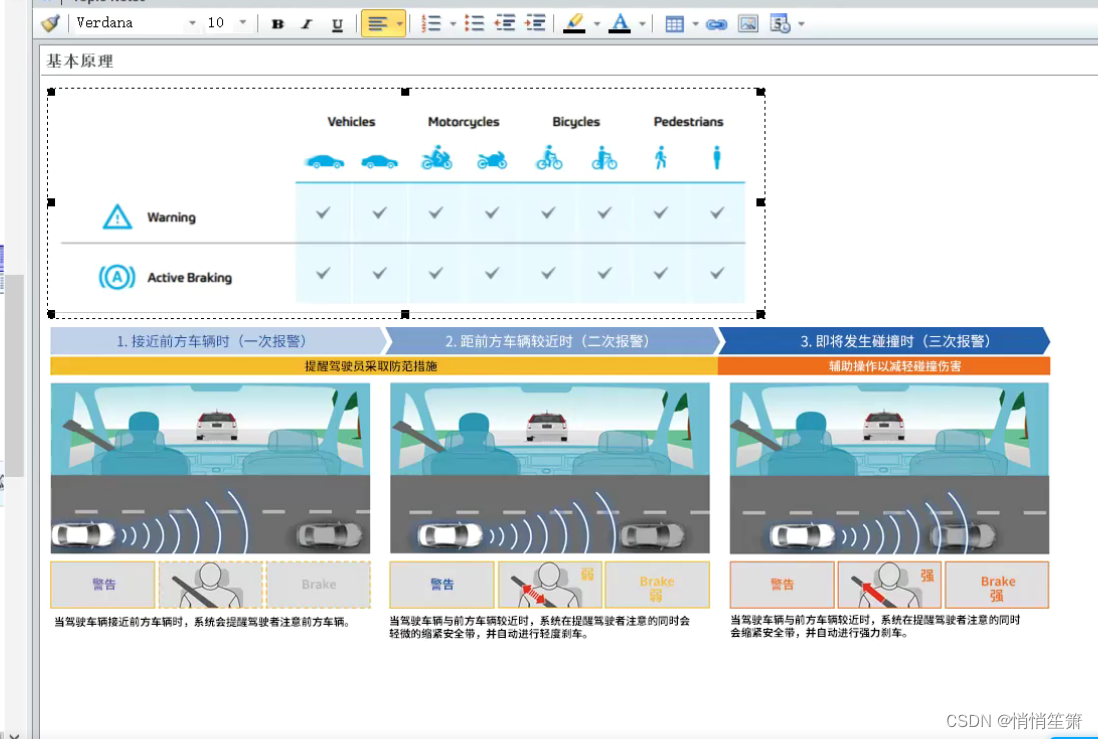
报警,小中大制动:1g
感知什么:车倒在那里,特斯拉搞不定
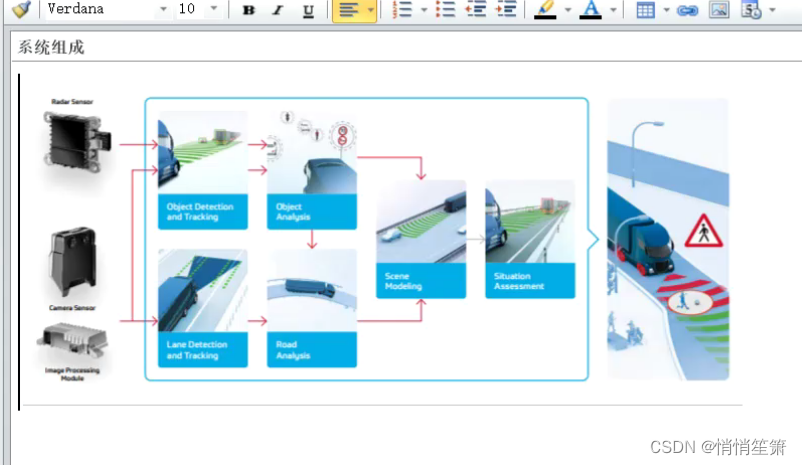
单目摄像头类别的精度要高于毫米波雷达,距离的精度要差于雷达
雷达适应于晴天,雨天
AEB只是功能之一
目标级的传感器
安全距离<多少,报警
考虑10条信号
给不同的值看逻辑是不是对的
prefare 消除制动延迟
主缸建压


1m左右,没有 标准


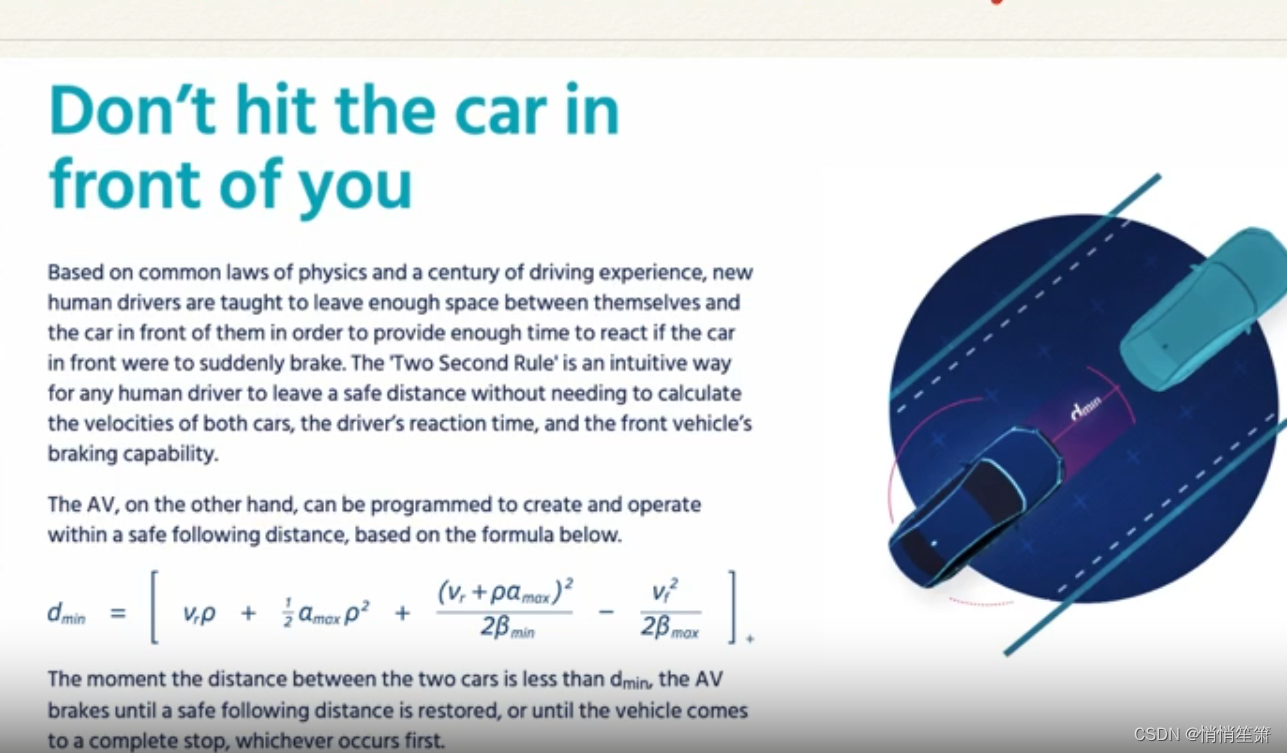
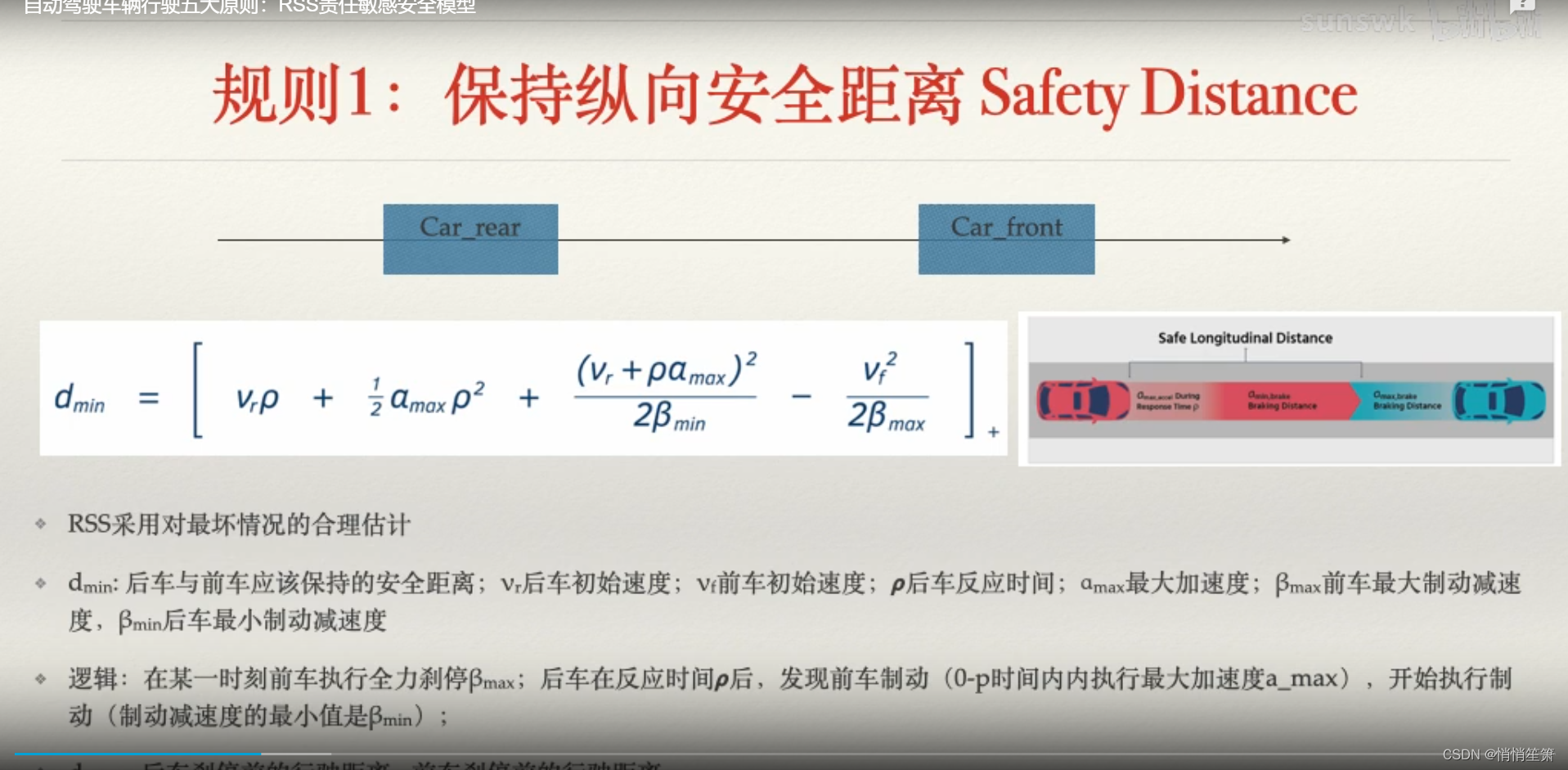
最坏场景的估计
请求给到ESC
报警,小中大制动:1g
感知什么:车倒在那里,特斯拉搞不定
单目摄像头类别的精度要高于毫米波雷达,距离的精度要差于雷达
雷达适应于晴天,雨天
AEB只是功能之一
目标级的传感器
安全距离<多少,报警
考虑10条信号
给不同的值看逻辑是不是对的
prefare 消除制动延迟
主缸建压
1m左右,没有 标准
最坏场景的估计
 2133
1048
2133
1048











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























