






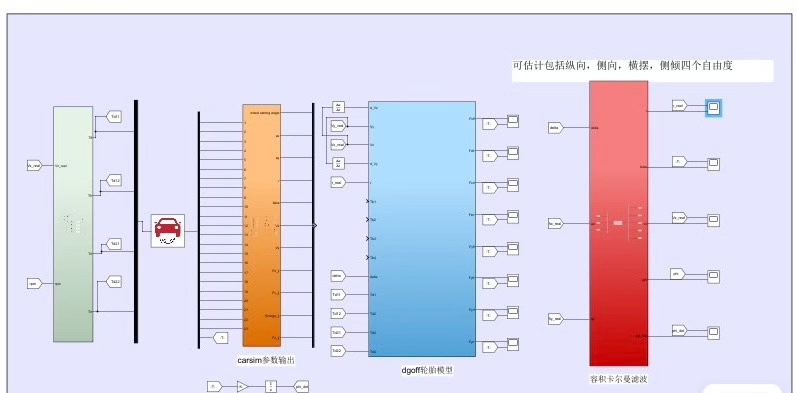
基于分布式驱动电动汽车的车辆状态估计,可估计包括纵向速度,质心侧偏角,横摆角速度,侧倾角四个状态。
四个模型,车身,算法,轮胎模型,可估计包括纵向速度,横摆角速度,质心侧偏角,侧倾角四个自由度等。
ID:72135746211829230
蒲甘有才的贝壳
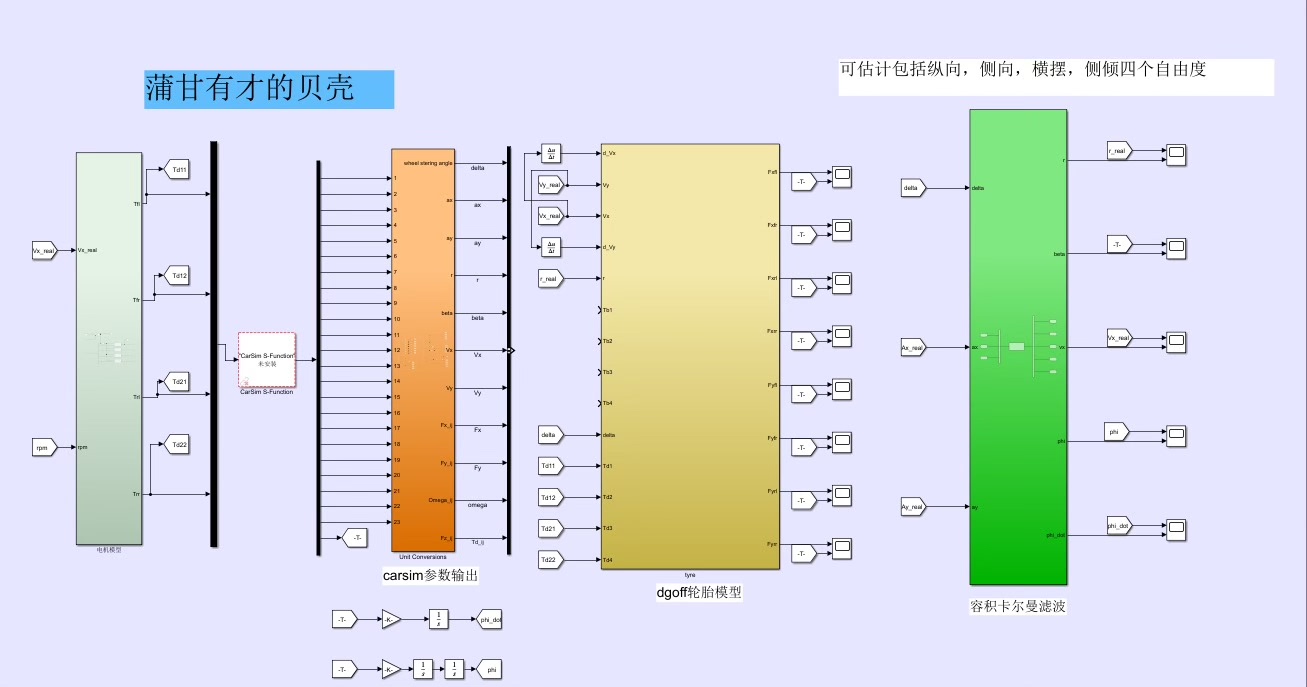
基于分布式驱动电动汽车的车辆状态估计是一项关键技术,它可以准确地估计车辆的纵向速度、质心侧偏角、横摆角速度和侧倾角四个状态。为了实现这一目标,我们需要建立四个模型,即车身模型、算法模型、轮胎模型和自由度模型。
首先,车身模型是车辆状态估计的基础,它描述了车辆在运动过程中的动力学特性。通过对车辆的质量、惯性矩阵和几何参数进行建模,我们可以得到车身模型的数学表达式。在状态估计过程中,我们根据车辆的运动输入和输出信号,利用车身模型进行状态预测和修正,从而实现对纵向速度、质心侧偏角、横摆角速度和侧倾角的估计。
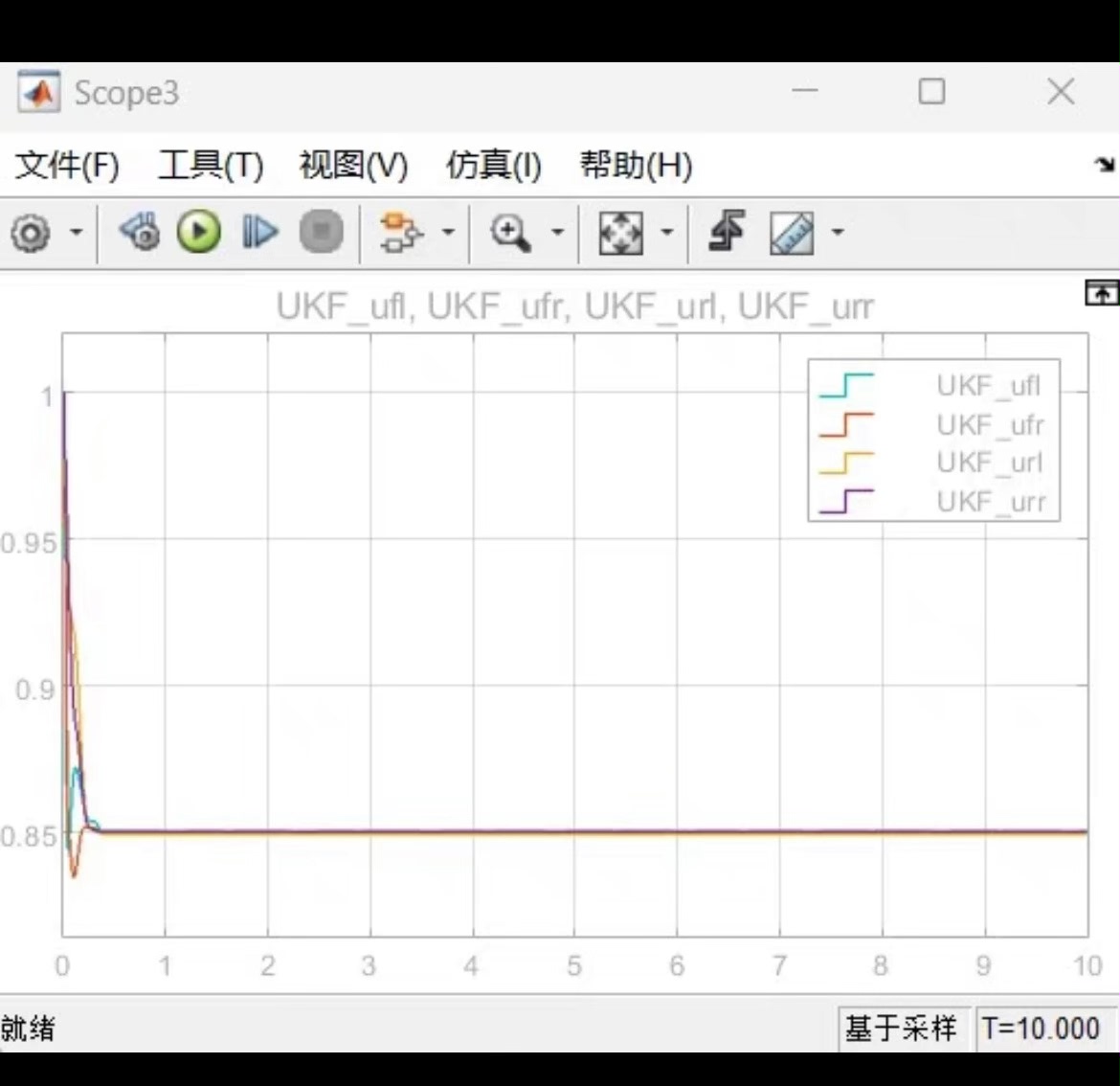
其次,算法模型是车辆状态估计的核心,它利用传感器数据和控制指令,通过一系列推导和计算,实现对目标状态的估计。算法模型可以包括滤波算法、优化算法和机器学习算法等多种方法。其中,滤波算法可以通过对传感器数据进行加权平均或者卡尔曼滤波等处理,提高状态估计的准确性和稳定性。优化算法可以通过最小二乘法或者最大似然估计等方法,将状态估计问题转化为优化问题,并找到使误差最小化的最优解。机器学习算法可以通过对大量历史数据的训练和学习,建立状态估计模型,并利用该模型对新数据进行预测。
第三,轮胎模型是车辆状态估计的重要组成部分,它描述了车辆轮胎与路面之间的力学关系。轮胎模型可以分为纵向轮胎模型和横向轮胎模型两种。纵向轮胎模型描述了轮胎在纵向方向上的力学特性,通过对轮胎的侧偏刚度、纵向刚度和摩擦系数等参数进行建模,可以实现纵向速度的估计。横向轮胎模型描述了轮胎在横向方向上的力学特性,通过对轮胎的侧向刚度、滑移角和侧向力系数等参数进行建模,可以实现横摆角速度和侧倾角的估计。
最后,自由度模型是车辆状态估计的综合模型,它将车身模型、算法模型和轮胎模型进行整合,实现对纵向速度、质心侧偏角、横摆角速度和侧倾角四个自由度的估计。自由度模型可以采用传统的物理模型或者基于数据驱动的模型,根据实际需求和可用数据进行选择。在状态估计过程中,自由度模型综合考虑了车辆的动力学特性、传感器数据和控制指令,通过优化算法或者机器学习算法,实现对目标状态的准确估计。
综上所述,基于分布式驱动电动汽车的车辆状态估计是一个复杂而关键的技术。通过建立车身模型、算法模型、轮胎模型和自由度模型,我们可以实现对纵向速度、质心侧偏角、横摆角速度和侧倾角四个状态的准确估计。这项技术在电动汽车的动力控制、安全性能和能源管理等方面具有重要应用价值,对于推动电动汽车的发展具有重要意义。
【相关代码,程序地址】:http://fansik.cn/746211829230.html
















 425
425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









