







 雷达自19世纪电磁波理论基础形成以来,历经多次技术革新,从最初的军事应用扩展到气象、交通等多个领域。军用雷达包括搜索警戒、跟踪和侦察校验,而民用雷达涉及气象勘探、自动导航等。雷达的关键技术指标包括工作频率、发射功率、脉冲宽度等,这些决定了雷达的性能和应用范围。
雷达自19世纪电磁波理论基础形成以来,历经多次技术革新,从最初的军事应用扩展到气象、交通等多个领域。军用雷达包括搜索警戒、跟踪和侦察校验,而民用雷达涉及气象勘探、自动导航等。雷达的关键技术指标包括工作频率、发射功率、脉冲宽度等,这些决定了雷达的性能和应用范围。
雷达的发展历史及性能指标
雷达的发展历史
雷达是利用电磁波进行对指定目标进行感知的一种设备,其起源可以追溯到19世纪。法拉第提出电场和磁场的概念并预言了电磁波的存在,随后麦克斯韦构建了经典的电磁学理论,最后赫兹通过实验证实了电磁场的存在,为雷达的制造奠定了科学的基础。
(1930s-1950s) 1935年英国的罗伯特·沃森研制了世界上第一台雷达,1936年美国海军研制了第一台收发共用的雷达。1940年间,由于世界大战军事上的需要,雷达发展迅速。1940年多腔体磁控管雷达研制成果,1942年雷达开始量产并运用在实战中。
(1950s-1970s) 雷达的理论研究高速发展,雷达的匹配滤波理论、统计检测、模糊函数等重要理论都是在这一时期形成的。在60年代,由于航空航天工业的快速发展和迫切需求,雷达精度进一步提高,工作波长从短波扩展到毫米波、红外线、紫外线等领域;脉冲压缩技术成熟,出现了相控阵雷达和单脉冲雷达,同时相参雷达的出现也进一步拓展了多普勒雷达的构建。各种高精度、远距离、高分辨力、多目标测量的雷达逐步出现。
(1970s-2000s)这一时代随着数字电路技术的不断发展和电路集成度的不断提高,雷达朝着高频、高精度、高灵活、小型化的方向不断演进。同时数字电路技术的进步,使得计算机进行雷达信号处理能力逐步增强。
(2000s-至今)今天的雷达主要以基于相位控制的相控阵、合成孔径和脉冲多普勒三种体制构建。同时雷达逐步网络化,智能化,网络通信系统也在于雷达感知系统逐步走向统一。
雷达的应用
2.1 军用雷达
搜索警戒雷达
搜索警戒雷达雷达用于发现目标从而实现预警的作用。其具有作用距离远、覆盖范围广,对目标坐标的精度和分辨力要求不高的特点,其作用距离一般可以达到几百甚至几千千米,用于探测敌方飞机、导弹、舰艇等,按照其探测距离可以分为如下几种:
近程警戒雷达,探测距离200-300km
中程警戒雷达,探测距离300-500km
远程警戒雷达,探测距离500-4000km
超远程警戒雷达,探测距离4000km以上
现代搜索雷达主要有:二维搜索雷达、机载预警雷达、弹道导弹雷达和超视距雷达等。二维搜索雷达是指能够进行二维平面内探测的雷达。而机载预警雷达则是指将雷达装在载预警机上,利用飞机高空优势进行探测的雷达,此类雷达能够在很强的杂波下把信号目标检测出来。弹道导弹跟踪雷达,用于跟踪各种导弹,并连续测定其坐标和速度,预测其未来位置,测定其轨道,进行防空预警和制导。超视距雷达通过利用地球电离层对电磁波的反射来进行相关目标的检测,能极大地拓展雷达测距范围。
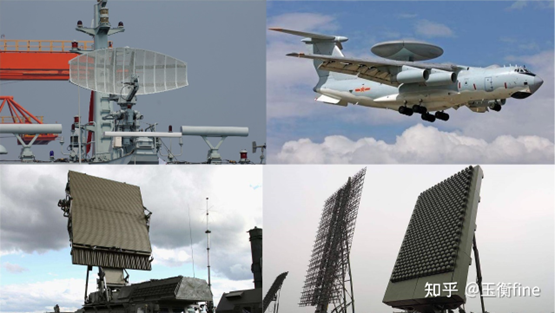
图2.1 各类预警雷达
2. 跟踪雷达
跟踪雷达主要用于给武器系统提供连续的、精确的目标坐标参数和轨道轨迹,从而实现武器对目标的精确打击。这一类雷达与上面警戒雷达不同之处在于,这一类雷达对于参数的精确度和分辨力要求很高,且要求雷达能够对目标进行跟踪和轨迹预测。这一类型的雷达主要有:炮瞄雷达、制导雷达、引信雷达等。这一类雷达于我们军事中耳熟能详的美国爱国者导弹、F35战机有着密不可分的联系。

图2.2 爱国者导弹制导雷达
3. 侦察校验雷达
校验侦察雷达主要用于侦察敌情,监视战场动态情况。
2.2 民用雷达
民用领域的雷达依然处于发展阶段,主要用于:气象勘探、地下探测、碰撞检测、自动导航、交通控制、城市测绘等领域。许多雷达是军民两用的,但是目前依然以军用雷达为主流。常见的民用雷达有: 空中交通管制雷达(ATC), 机载导航雷达、船舶导航雷达、无线电测高等
雷达的工作频率和工作指标
3.1 雷达频段
目前投入使用中的雷达频段大部分在200~10000MHz。目前更高频段的雷达依然在研发中,毫米波雷达的研究和通信与雷达系统的一体化已经成为了当前的重要研究方向。
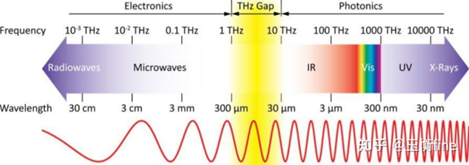
图2.3 电磁波谱图
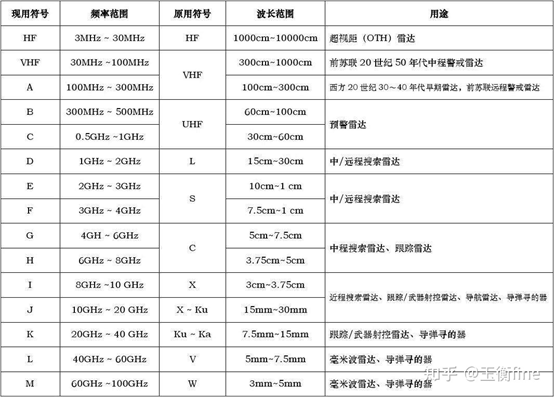
而按照习惯,雷达的不同波段也按照如下表格IEEE标准来进行命名:

3.2 雷达不同波段的应用
不同波长的电磁波往往物理特性差异巨大,而在雷达所使用的电磁波范围内,其特性差异也是巨大的。通常而言,低频段的电磁波可以获得更大的发射功率和远的探测距离,但是低频段的电磁波方向性较差使得测量精度有所局限,且需要的天线物理尺寸较大,移动性较差。而高频段的电磁波具有良好的方向性,容易获得较高的测量角度。但是高频段的电磁波一方面在工艺上不够成熟、另一方面大气中衰减大,难以获得较大的功率。同时气象条件对于雷达的影响十分剧烈,但是由于其所需要的尺寸小,能够方便安装在诸多物体上,具有良好的移动性。
3.3 雷达主要技术指标介绍
技术指标,是保证装备战术性能实现的指标,如装备的几何尺寸、重量、动力装置的功率、可靠性、维修性、保障性、标准化要求等技术参数。雷达的主要技术指标有如下几种:
1、工作频率:雷达的工作频率是雷达最为重要的技术指标之一,雷达的频率直接决定了雷达可使用的带宽和频率范围以及大气中电磁波传播的衰减情况,间接决定了雷达其他工作特性。
2、发射功率和调制波形。雷达要求大功率发射电磁波,早期的雷达多采用简单的调制波形,现代的雷达波形设计也越来越复杂,从而实现越来越多的任务。
3、脉冲宽度。脉冲宽度是针对脉冲形雷达来说的,雷达的脉冲宽度指的是雷达脉冲持续的时间。脉冲宽度可以影响雷达的分辨力与探测能力。
4、重复频率,指的是雷达每秒钟重复发送脉冲的个数。
5、天线波束形状,天线波束形状一般使用垂直面和水平面之间的波束宽度来表示。
6、线扫描方式,天线主要可以分为机械扫描与电扫描两类。
7、接收机灵敏度。接收机灵敏度大小决定了接收机所能够接收到信号的最小功率,能够反映雷达最大作用距离。
8、显示器形式和数量。

















 2634
2634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









