







目录
1. 简介
在《Vitis Accelerated Libraries 学习笔记--OpenCV 安装指南-CSDN博客》一文中,我详尽地介绍了 OpenCV 的安装过程。尽管 Vitis Vision 库的实现本身并不依赖于 OpenCV,但要运行库中的示例设计,OpenCV 是必需的。此外,在用户的测试平台上验证算法时,也可能会用到 OpenCV。在本文中,我们将深入探讨如何有效地利用 OpenCV 库来执行测试,确保您的设计能够在实际环境中达到预期的性能。
本文基于你了解 OpenCV 库的基本功能和它在图像处理和计算机视觉中的应用,然后,我会详细说明如何将 OpenCV 集成到 Vitis Vision 库的工作流中,以及如何使用 OpenCV 提供的函数来创建测试用例和验证设计。
2. 实例测试
2.1 实例介绍
以 Vitis Vision Library 中的 resize 内核为例,它的主要功能是执行图像的缩放操作。在 Vitis_Libraries/vision/L1/tests/resize/ 目录下,你会发现一系列文件夹,这些文件夹代表了不同的测试用例,用于验证和展示 resize 内核的功能:
- resize_NPPC1_8UC1_8UC1_AREA
- resize_NPPC1_8UC1_8UC1_BILINEAR
- resize_NPPC1_8UC1_8UC1_NN
- resize_NPPC1_8UC3_8UC3_AREA
- resize_NPPC1_8UC3_8UC3_BILINEAR
- resize_NPPC1_8UC3_8UC3_NN
- resize_NPPC8_8UC1_8UC1_AREA
- resize_NPPC8_8UC1_8UC1_BILINEAR
- resize_NPPC8_8UC1_8UC1_NN
- resize_NPPC8_8UC3_8UC3_AREA
- resize_NPPC8_8UC3_8UC3_BILINEAR
- resize_NPPC8_8UC3_8UC3_NN
我们先来了解一下这些文件夹的命名含义:
- NPPC1 或 NPPC8: 这代表每个像素时钟周期(Number of Pixels Per Clock)的数量。NPPC1 表示每个时钟周期处理一个像素,而 NPPC8 表示每个时钟周期处理八个像素。
- 8UC1 或 8UC3: 这指的是图像的类型。8UC1 表示 8 位无符号单通道图像,而 8UC3 表示 8 位无符号三通道图像。
- AREA, BILINEAR, NN: 这些是 resize 函数使用的不同插值方法。AREA 是面积插值,BILINEAR 是双线性插值,NN 是最近邻插值。
最近邻插值(Nearest Neighbor, NN): 这是最简单的插值方法。它选择最接近目标位置的源像素值来填充目标像素。这种方法的计算速度快,但可能会导致图像在放大时出现块状效果。
双线性插值(Bilinear): 双线性插值考虑了最近的四个像素点,并基于它们的距离,计算加权平均值来确定新像素的值。这种方法比最近邻插值平滑,但在某些情况下可能会引入模糊。
面积插值(Area): 面积插值是一种更复杂的方法,它考虑了源图像中多个像素的区域,并计算这些像素的平均值来确定目标像素的值。这种方法在缩小图像时特别有用,因为它可以减少混叠效应,通常能得到更平滑的结果。每种方法都有其优点和适用场景。最近邻插值适合对计算速度要求高的场合,双线性插值在保持图像细节的同时提供了平滑的效果,而面积插值则在减少图像缩小时的失真方面表现出色。选择哪种插值方法取决于具体的应用需求和预期的图像质量。
2.2 创建工程
通过 cmd 和 GUI 混合操作(实操下来,这个方法最容易理解)。
2.2.1 创建工程
cd /home/dong/Documents/test/resize
source /opt/Xilinx/Vitis_HLS/2022.1/settings64.sh
vitis_hls -gui # 在GUI中创建空白工程通过命令行打开 Vitis HLS 界面,因为之后的操作步骤要退出 GUI 回到命令行。
参考如下路径:

创建成功后,工程目录结构如下:
resize/
├── resize_kernel/
│ ├── solution1/
│ └── hls.app
└── vitis_hls.log创建命令后,即可退出 GUI,回到 bash shell。
2.2.2 获取路径
在 bash shell 中,通过 bash 命令获得如下3个路径。
1. XF_PROJ_ROOT 路径
XF_PROJ_ROOT 目录为 Vison 库的参考目录,在 vision 目录下运行 pwd 命令获得。
“/home/dong/Documents/vision”。
![]()
2. OPENCV_INCLUDE 路径
OPENCV_INCLUDE 是用来设置 OpenCV 头文件的路径。当你编译使用OpenCV的程序时,编译器会在这个路径下查找所需的头文件。可运行如下命令获得:
pkg-config --cflags opencv4 | sed 's/-I//g'“/usr/local/include/opencv4” 。
![]()
3. OPENCV_LIB 目录
OPENCV_LIB 是用来设置OpenCV库文件的路径。在链接程序时,链接器会在这个路径下查找OpenCV的库文件。 可运行如下命令获得:
pkg-config --libs-only-L opencv4 | sed 's/-L//g'“/usr/local/lib ”。
![]()
2.2.3 设置路径
进入 vitis_hls -i 赋值如下内容,三行分开复制并执行。
set XF_PROJ_ROOT /home/dong/Documents/vision
set OPENCV_INCLUDE /usr/local/include/opencv4
set OPENCV_LIB /usr/local/lib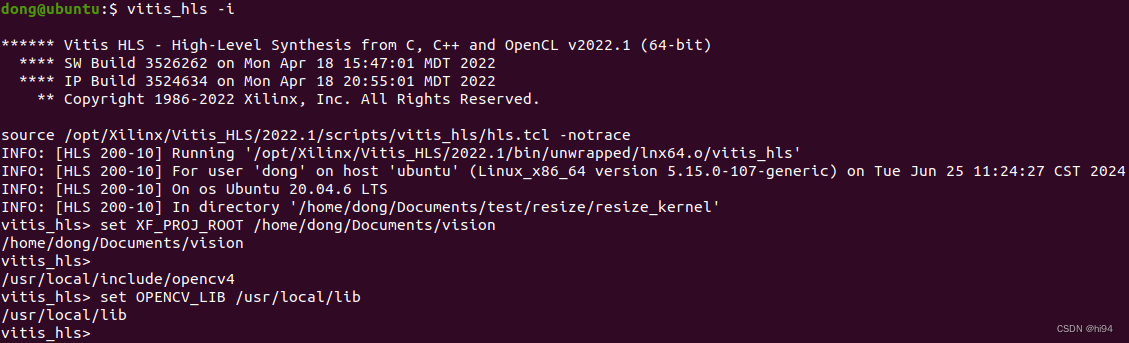
clear,清除窗口内容。
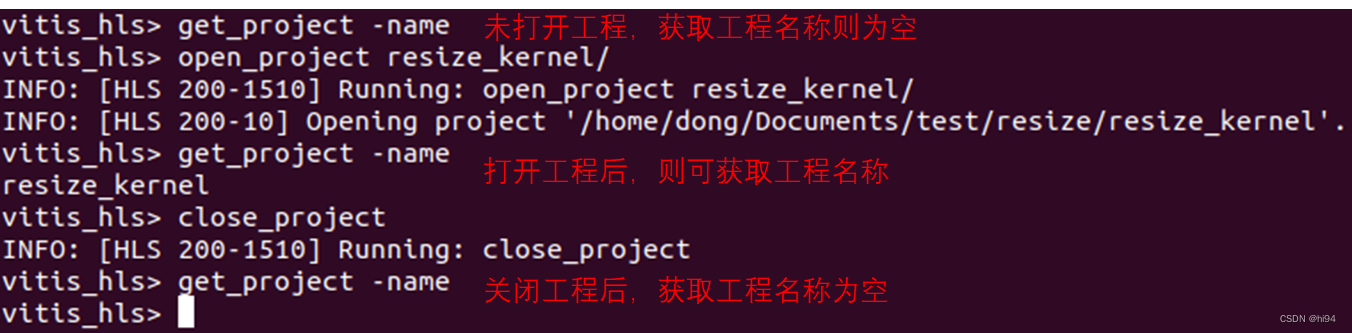
2.2.4 打开工程
继续在命令模式中:
cd resize
open_project -reset NAME其中,NAME 为工程名称,此例中,工程名称为 resize_kernel。
resize/
├── resize_kernel/
│ ├── solution1/
│ └── hls.app
└── vitis_hls.log-reset:移除工程内已存在的所有数据,即将工程复位。每条新的 add_files 命令都会向现有
工程添加更多文件,多次添加同一个文件,可能引起错乱。
get_project -name,可查看是否打开工程。
2.2.5 添加文件
在 <vitis lib>/vision/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA 目录下,找到 run_hls.tcl 命令,找到 add_files 命令对应的行,添加文件。
1. 加速器的实现代码文件:
add_files "${XF_PROJ_ROOT}/L1/examples/resize/xf_resize_accel.cpp" -cflags " -I ${XF_PROJ_ROOT}/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I${XF_PROJ_ROOT}/L1/include -I ./ -D__SDSVHLS__ -std=c++0x" -csimflags " -I ${XF_PROJ_ROOT}/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I${XF_PROJ_ROOT}/L1/include -I ./ -D__SDSVHLS__ -std=c++0x"添加成功后,显示:
INFO: [HLS 200-10] Adding design file '/home/dong/Documents/Vitis_Libraries-main/vision/L1/examples/resize/xf_resize_accel.cpp' to the project2. 测试平台文件:
add_files -tb "${XF_PROJ_ROOT}/L1/examples/resize/xf_resize_tb.cpp" -cflags " -I ${XF_PROJ_ROOT}/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I${OPENCV_INCLUDE} -I${XF_PROJ_ROOT}/L1/include -I ./ -D__SDSVHLS__ -std=c++0x" -csimflags " -I ${XF_PROJ_ROOT}/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I${XF_PROJ_ROOT}/L1/include -I ./ -D__SDSVHLS__ -std=c++0x"添加成功后,显示:
INFO: [HLS 200-10] Adding test bench file '/home/dong/Documents/Vitis_Libraries-main/vision/L1/examples/resize/xf_resize_tb.cpp' to the project3. 设置 Top
找到 set_top 命令对应的行:
set_top resize_accel2.2.6 启动 GUI
vitis_hls -p NAME-p:在 IDE 模式下打开现有工程。
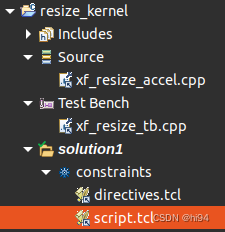
在 script.tcl 目录中,可以看到之前的配置已经生效:
open_project resize_kernel
set_top resize_accel
add_files ../../Vitis_Libraries_main/vision/L1/examples/resize/xf_resize_accel.cpp -cflags "-I/home/dong/Documents/Vitis_Libraries_main/vision/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I/home/dong/Documents/Vitis_Libraries_main/vision/L1/include -I./. -D__SDSVHLS__ -std=c++0x" -csimflags "-I/home/dong/Documents/Vitis_Libraries_main/vision/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I/home/dong/Documents/Vitis_Libraries_main/vision/L1/include -I./. -D__SDSVHLS__ -std=c++0x"
add_files -tb ../../Vitis_Libraries_main/vision/L1/examples/resize/xf_resize_tb.cpp -cflags "-I/home/dong/Documents/Vitis_Libraries_main/vision/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I/usr/local/include/opencv4 -I/home/dong/Documents/Vitis_Libraries_main/vision/L1/include -I. -D__SDSVHLS__ -std=c++0x -Wno-unknown-pragmas" -csimflags "-I/home/dong/Documents/Vitis_Libraries_main/vision/L1/tests/resize/resize_NPPC1_8UC1_8UC1_AREA -I/home/dong/Documents/Vitis_Libraries_main/vision/L1/include -I. -D__SDSVHLS__ -std=c++0x -Wno-unknown-pragmas"
open_solution "solution1" -flow_target vivado
set_part {xck26-sfvc784-2LV-c}
create_clock -period 10 -name default
#source "./resize_kernel/solution1/directives.tcl"
csim_design
csynth_design
cosim_design
export_design -format ip_catalog
2.2.7 配置 csim 参数
在示例目录下,找到 csim_design 命令对应的行,配置参数。
if {$CSIM == 1} {
csim_design -ldflags "-L ${OPENCV_LIB} -lopencv_imgcodecs -lopencv_imgproc -lopencv_core -lopencv_highgui -lopencv_flann -lopencv_features2d" -argv " ${XF_PROJ_ROOT}/data/128x128.png"
}
3 常见错误
3.1 核心共享库报错
/xx/xx/.../: error while loading shared libraries: libopencv_imgcodecs.so.4.4: cannot open shared object file: No such file or directory
意味着程序无法找到OpenCV的核心共享库文件。
解决办法:
使用以下命令行查找包含共享库 libopencv_imgcodecs.so.4.4 的文件夹:
sudo find / -name "libopencv_imgcodecs.so.4.4"创建一个名为 /etc/ld.so.conf.d/opencv.conf 的文件,并向其中写入存储二进制文件的文件夹的路径。例如,我将 /usr/local/lib/ 写入我的 opencv.conf 文件。按如下方式运行命令行:
sudo ldconfig -v
4. 总结
在本系列学习笔记中,我们探讨了 Vitis Accelerated Libraries 和 OpenCV 的结合使用,强调了 OpenCV 在运行 Vitis Vision 库示例设计和验证用户测试平台算法中的重要性。通过详细的安装指南和实例测试,我们展示了如何将 OpenCV 集成到 Vitis Vision 库的工作流中,并利用其强大的函数库来创建和验证测试用例。
我们还讨论了如何解决常见的错误,例如找不到 OpenCV 核心共享库文件的问题,确保开发环境的顺利设置。通过这些步骤,使我们的工程设计在实际环境中能够达到预期的性能,同时也能够更好地理解和利用 Vitis Vision 库和 OpenCV 的强大功能。















 1341
1341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









