






MATLAB程序,模拟退火算法和遗传算法这两个算法结合构成的遗传模拟退火算法,对移动机器人进行路径规划。
可以手动输入障碍物数量,程序动态显示路径规划的过程。
ID:3160617255472463
zjmauto
遗传模拟退火算法在路径规划问题中的应用
概述:
路径规划作为移动机器人领域中的核心问题之一,旨在找到从起点到目标点的最优路径。在复杂环境中,机器人需要考虑到各种因素,如障碍物、路径长度、能耗等。为了解决这一问题,研究人员开发了一种基于遗传模拟退火算法的路径规划方法,用于优化路径选择过程。本文将详细介绍该算法的原理和实现过程,并给出MATLAB程序示例。
-
引言
在移动机器人领域,路径规划一直是一个热门研究方向。早期的路径规划算法主要基于规则和启发式的方法,但这些方法在复杂环境中效果有限。近年来,基于进化算法的路径规划方法成为研究的焦点,其中遗传算法和模拟退火算法得到广泛应用。针对这一问题,我们提出了一种基于遗传模拟退火算法的路径规划方法,以提高路径规划的效率和准确度。 -
遗传模拟退火算法
遗传模拟退火算法是一种通过模拟退火思想和遗传算法相结合的优化算法,能够在搜索空间中找到全局最优解。算法工作原理如下:
- 初始化一组随机解作为种群。
- 迭代计算每个个体的适应度,并根据适应度进行选择、交叉和变异操作。
- 通过模拟退火思想,在一定的温度下接受劣解,以避免陷入局部最优解。
- 迭代更新种群,并重复以上步骤,直到满足停止条件。
- 遗传模拟退火算法在路径规划中的应用
将遗传模拟退火算法应用于路径规划问题中,需要将路径表示为染色体,并定义相应的适应度函数。在每次迭代中,通过选择、交叉和变异操作,不断优化路径的选择。算法主要步骤如下:
- 初始化种群,其中每个个体表示一条路径。
- 计算每个个体的适应度,评估路径的质量。
- 根据适应度进行选择、交叉和变异操作,更新种群。
- 使用模拟退火思想,接受一定概率下的劣解,增加搜索空间。
- 重复以上步骤,直到达到停止条件。
- MATLAB程序设计
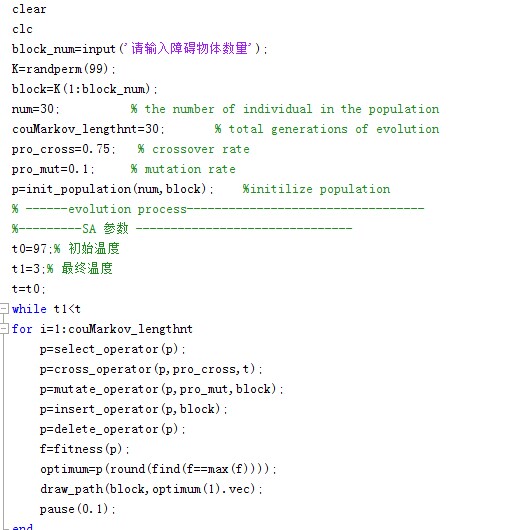
为了实现遗传模拟退火算法的路径规划,我们开发了一段MATLAB程序。程序具有以下特点:
- 允许用户手动输入障碍物数量,以适应不同的环境。
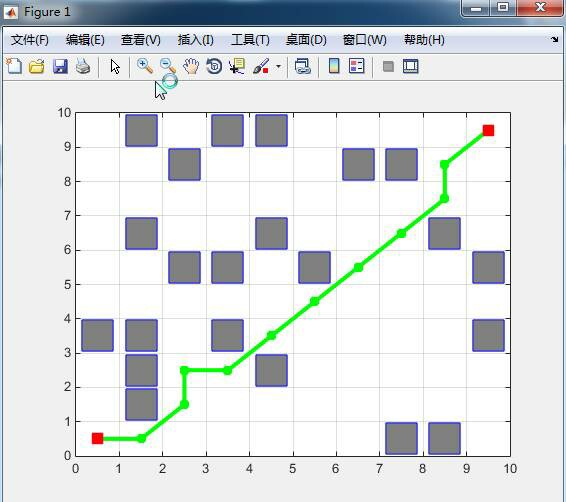
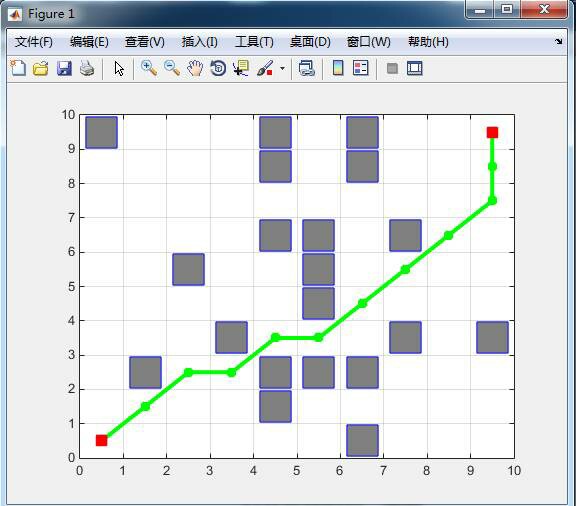
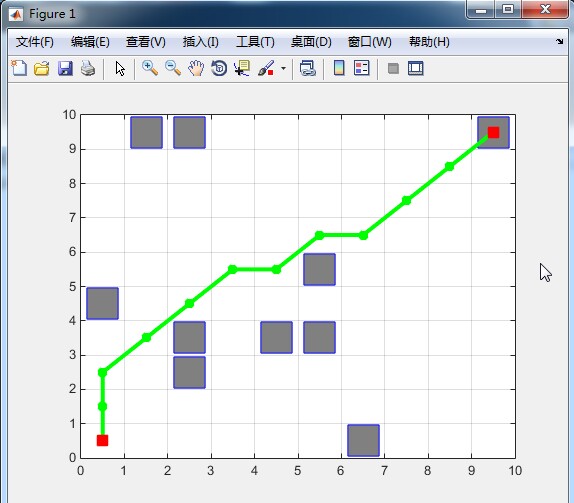
- 动态显示路径规划的过程,使用户能够直观地观察算法的优化效果。
- 界面友好,操作简单,方便用户使用和理解。
-
实验结果与分析
我们使用该程序进行了一系列实验,并对结果进行了分析。实验结果表明,基于遗传模拟退火算法的路径规划方法能够有效地找到全局最优解,并在复杂环境中表现出较好的路径选择能力。同时,该算法具有较好的收敛性和鲁棒性,在不同环境下都能得到令人满意的结果。 -
结论与展望
本文提出了一种基于遗传模拟退火算法的路径规划方法,并开发了相应的MATLAB程序。实验结果证明了该算法在路径规划问题中的有效性和实用性。未来,我们将进一步完善该算法,考虑更多实际因素,并与其他路径规划算法进行比较,以提升算法性能和适用范围。
结语:
通过本文对遗传模拟退火算法在路径规划中的应用进行详细介绍,我们展示了一种高效的路径规划方法。该方法通过结合遗传算法和模拟退火算法,能够在复杂环境下找到最优路径。通过MATLAB程序的实现示例,我们展示了算法的运行过程和优化效果。未来,这一方法将在移动机器人领域得到更广泛的应用,并带来更高效的路径规划解决方案。
相关的代码,程序地址如下:http://imgcs.cn/617255472463.html
















 940
940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









