






基于滑膜控制的差动制动防侧翻稳定性控制,上层通过滑膜控制产生期望的横摆力矩,下层根据对应的paper实现对应的制动力矩分配,实现车辆的防侧翻稳定性控制,通过通过carsim和simulink联合仿真,设置对应的鱼钩工况,结果表明设计的差动制动防侧翻控制能够防止车辆侧翻,维持车辆稳定. 资料齐全,仿真包运行
YID:96130709553152401
想剁手书屋14

基于滑膜控制的差动制动防侧翻稳定性控制
引言:
差动制动防侧翻稳定性控制是车辆安全性的关键。在车辆行驶过程中,侧翻是一种可能导致严重事故的危险情况,因此,研究并采取相应的措施来防止车辆侧翻至关重要。本文基于滑膜控制的差动制动技术,探讨了一种用于增强车辆防侧翻稳定性的方法,并通过Carsim和Simulink联合仿真进行验证。本文旨在深入分析差动制动防侧翻控制方法,为车辆安全性的提升提供理论支持和技术指导。
-
引入滑膜控制的差动制动系统
滑膜控制是一种常用于汽车制动系统的技术,其原理是通过控制刹车系统的制动力矩分配来实现车辆的稳定性控制。在差动制动防侧翻控制系统中,滑膜控制被引入以实现期望的横摆力矩的产生。 -
上层控制:滑膜控制产生期望的横摆力矩
差动制动防侧翻控制系统的上层控制通过滑膜控制产生期望的横摆力矩。滑膜控制是一种通过对车辆的动态性能进行监测和调整来实现控制目标的方法。上层控制系统监测车辆的动态行为,包括横向加速度、横摆角速度等,并根据这些信息来生成期望的横摆力矩。 -
下层控制:制动力矩分配实现防侧翻控制
差动制动防侧翻控制系统的下层控制根据上层控制产生的期望横摆力矩,通过对应的paper实现对应的制动力矩分配。制动力矩分配是根据车辆的侧倾角和滚转角速度来分配制动力矩的方法。通过差动制动的方式,将制动力矩分配到各个车轮,从而实现车辆的防侧翻稳定性控制。 -
联合仿真验证及结果分析
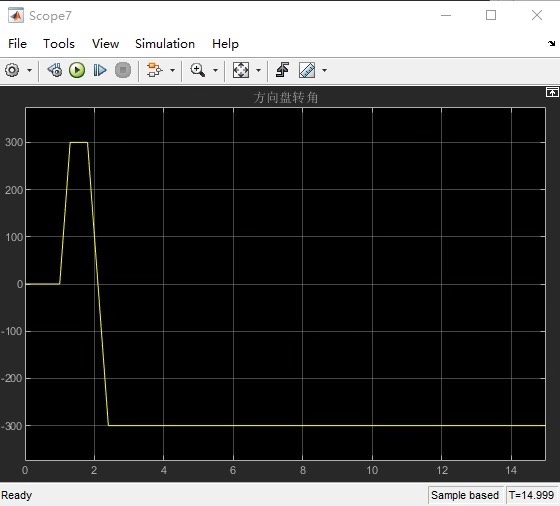
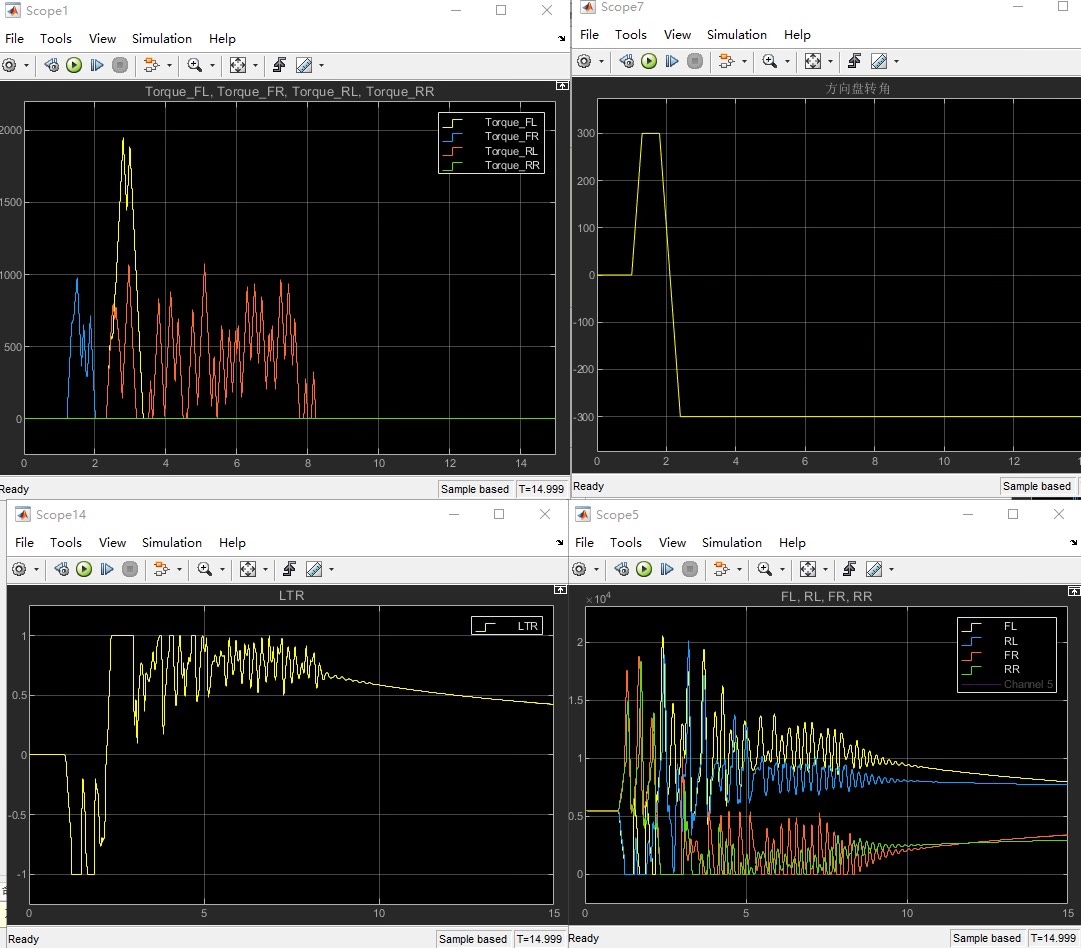
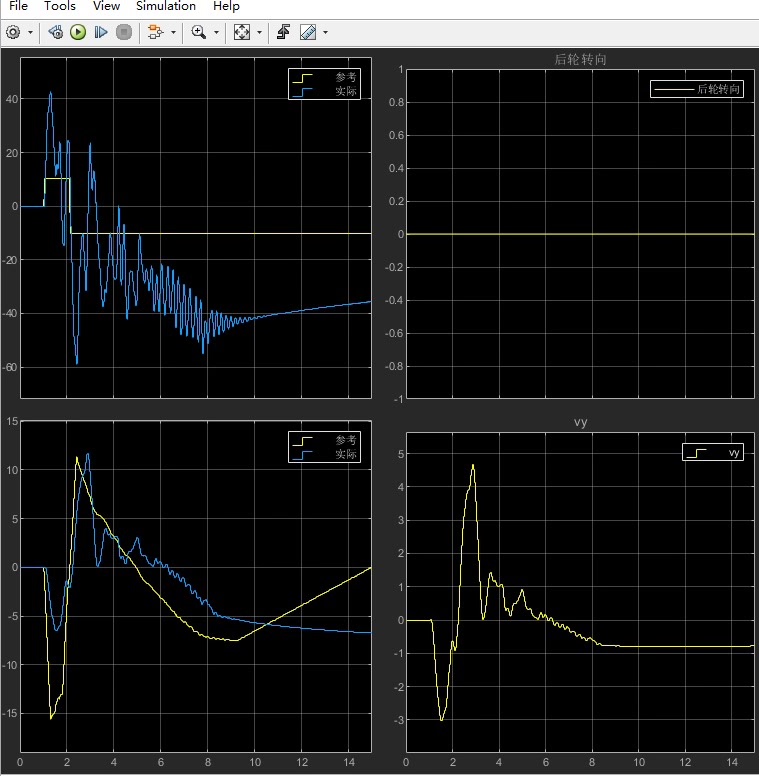
为了验证差动制动防侧翻控制系统的有效性,本文采用Carsim和Simulink进行联合仿真,并设置对应的鱼钩工况。仿真结果表明设计的差动制动防侧翻控制能够防止车辆侧翻,维持车辆稳定。
结论:
本文围绕基于滑膜控制的差动制动防侧翻稳定性控制展开了分析和讨论。通过上层滑膜控制产生期望的横摆力矩,以及下层制动力矩分配实现防侧翻控制,有效提升了车辆的安全性和稳定性。联合仿真结果验证了该控制系统的有效性。本文的研究成果对差动制动防侧翻控制技术的推广和应用具有指导意义,为车辆行驶安全性的提升提供了理论支持。
附录:
资料齐全,并包含了仿真运行所需的模型和数据。通过该模型和数据的仿真运行,验证了差动制动防侧翻控制系统的有效性和稳定性。
相关的代码,程序地址如下:http://lanzoup.cn/709553152401.html
















 496
496











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









