









跟着大佬学图像分类系列,→ 传送门 ←
本博客图像分类系列文章传送门:
前言
图像分类是学习目标检测的“量变”内容,那么,废话不多说,开搞!

一、VGG 是什么?
VGG 网络是14年被牛津大学的著名研究组 VGG(Visual Geometry Group)提出,斩获该年 ImageNet 竞赛中 Localization Task(定位任务)第一名和 Classification Task(分类任务)第二名。
二、网络结构

1.网络特点
- 通过堆叠多个 3*3 的卷积核来代替大尺度卷积核(减少所需的参数)
论文提出可以通过堆叠两个 3*3 的卷积核来代替 5*5 的卷积核;堆叠三个 3*3 的卷积核来代替 7*7 的卷积核。虽然用了小的卷积核来替换大的卷积核,但并不会影响感受野,即感受野是相同的。
2.感受野(拓展)
在卷积神经网络中,决定某一层输出结果中一个元素所对应的输入层的区域大小,被称为感受野。通俗来说就是输出的 feature map 上的一个单元对应输入层上的区域大小。
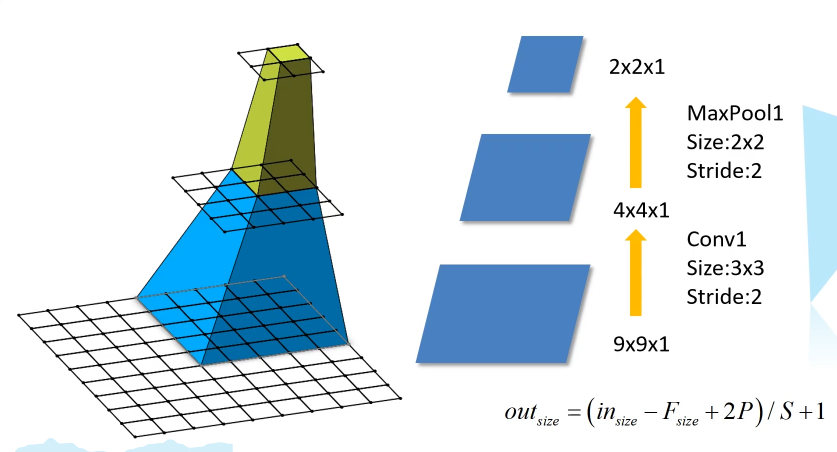
如上图所示,自下向上,输入一个 9*9*1 的特征图,经过卷积层 Conv1,得到 4*4*1 大小的第一个输出层,再经过池化层 MaxPool1,得到 2*2*1 大小的输出层,。那么第二个输出层的一个单元(绿色方块)的感受野就是 2*2 大小的区域;第一层输出层的一个单元(蓝色方块)的感受野就是 5*5 大小的区域。
感受野计算公式:
F
(
i
)
F(i)
F(i) =
(
F
(
i
+
1
)
−
1
)
∗
S
t
r
i
d
e
+
K
s
i
z
e
( F(i + 1) - 1 )*Stride + Ksize
(F(i+1)−1)∗Stride+Ksize
式中,
F
(
i
)
F(i)
F(i) 为第 i 层感受野,Stride 为第 i 层的步距,Ksize 为卷积核或池化核的尺寸
以上图为例:
Feature Map:
F
(
3
)
=
1
F(3) = 1
F(3)=1(因为上面没有了,所以是1个单元格)
Pool1:
F
(
2
)
F(2)
F(2) =
(
F
(
3
)
−
1
)
∗
2
+
2
=
2
(F(3) - 1 )*2+ 2 = 2
(F(3)−1)∗2+2=2
Conv1:
F
(
1
)
F(1)
F(1) =
(
F
(
2
)
−
1
)
∗
2
+
3
=
5
( F(2) - 1 )*2+ 3 = 5
(F(2)−1)∗2+3=5
那么放在 VGG中就是:
Feature Map:
F
=
1
F = 1
F=1(顶层)
Conv3:
F
F
F =
(
1
−
1
)
∗
1
+
3
=
3
(1 - 1 )*1+ 3 = 3
(1−1)∗1+3=3(VGG的卷积核默认步长为1,大小为 3*3)
Conv2:
F
(
1
)
F(1)
F(1) =
(
3
−
1
)
∗
1
+
3
=
5
(3 - 1 )*1+ 3 = 5
(3−1)∗1+3=5 (所以堆叠两层卷积核,感受野与一个 5*5 大小的卷积核是一样的)
Conv1:
F
(
1
)
F(1)
F(1) =
(
5
−
1
)
∗
1
+
3
=
7
(5 - 1 )*1+ 3 = 7
(5−1)∗1+3=7 (堆叠三层卷积核,感受野与一个 7*7 大小的卷积核是一样的)
3.结构
- 在前面提到的“VGG网络论文中提供的6种网络配置”中,配置D是常用的结构(VGG16),因此这里也主要分析 VGG16 的结构。(该结构中使用的所有卷积核步长均为1,padding 均为1;池化核大小均为2,步长为2)

| number | Input_size | output_size | kernels | kernels_size |
|---|---|---|---|---|
| Conv1 | [224, 224, 3] | [224, 224, 64] | 64 | 3 |
| Conv2 | [224, 224, 64] | [224, 224, 64] | 64 | 3 |
| MaxPooling1 | [224, 224, 64] | [112, 112, 64] | \ | 2 |
| Conv3 | [112, 112, 64] | [112, 112, 128] | 128 | 3 |
| Conv4 | [112, 112, 128] | [112, 112, 128] | 128 | 3 |
| MaxPooling2 | [112, 112, 128] | [56, 56, 128] | \ | 2 |
| Conv5 | [56, 56, 128] | [56, 56, 256] | 256 | 3 |
| Conv6 | [56, 56, 256] | [56, 56, 256] | 256 | 3 |
| Conv7 | [56, 56, 256] | [56, 56, 256] | 256 | 3 |
| MaxPooling3 | [56, 56, 256] | [28, 28, 256] | \ | 2 |
| Conv8 | [28, 28, 256] | [28, 28, 512] | 512 | 3 |
| Conv9 | [28, 28, 512] | [28, 28, 512] | 512 | 3 |
| Conv10 | [28, 28, 512] | [28, 28, 512] | 512 | 3 |
| MaxPooling4 | [28, 28, 512] | [14, 14, 512] | \ | 2 |
| Conv11 | [14, 14, 512] | [14, 14, 512] | 512 | 3 |
| Conv12 | [14, 14, 512] | [14, 14, 512] | 512 | 3 |
| Conv13 | [14, 14, 512] | [14, 14, 512] | 512 | 3 |
| MaxPooling5 | [28, 28, 512] | [7, 7, 512] | \ | 2 |
| FC1 | 7*7*512(展平) | \ | \ | 4096 |
| FC2 | 4096 | \ | \ | 4096 |
| FC3 | 4096 | \ | \ | 1000 |
三、使用 Pytorch 搭建 VGG 网络
本代码使用的数据集来自 “花分类” 数据集,→ 传送门 ←(具体内容看 data_set文件夹下的 README.md)
- model.py ( 搭建 VGG 网络模型 )
import torch.nn as nn
import torch
class VGG(nn.Module):
def __init__(self, features, class_num=1000, init_weight=False):
super(VGG, self).__init__()
# 卷积层和池化层,来自 make_features 生成的特征提取网络
self.features = features
# 三层全连接层
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(512*7*7, 2048),
nn.ReLU(True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(True),
nn.Linear(2048, class_num)
)
if init_weight:
self._initialize_weight() # 详见 AlexNet 学习笔记
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, start_dim=1) # 展平,进入全连接层
x = self.classifier(x)
return x
def _initialize_weight(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.xavier_uniform_(m.weight)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight)
nn.init.constant_(m.bias, 0)
""" VGG网络几种不同的卷积网络配置(A,B,D,E) """
configs = {
# A 数字代表卷积核的数量,'M' 表示池化层
'vgg11':[64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
# B
'vgg13':[64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
# D
'vgg16':[64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
# E
'vgg19':[64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M']
}
# 根据选择的网络配置,生成提取特征网络结构
def make_features(cfg: list):
layers = []
in_channels = 3 # 初始输入通道(即 RGB 3通道)
for v in cfg:
if v == 'M': # 数组第i个元素为M,表示需要创建池化层
layers += [nn.MaxPool2d(kernel_size=2, stride=2)] # 池化核固定大小为2,步长为2
else: # 元素不为M,表示需要创建卷积层
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1) # 卷积核固定大小为3,步长为1,padding为1
layers += [conv2d, nn.ReLU(True)] # 卷积层后面会进入激活函数,这里当做一个整体放入一层
in_channels = v # 通道数(深度)变为卷积核的数量
return nn.Sequential(*layers) # *表示非关键字传入参数(Sequential见AlexNet网络学习笔记)
# 默认使用 Vgg16,用户可通过传参改变网络配置
def vgg(model_name="vgg16", **kwargs): # **kwargs:可变长度字典
try:
cfg = configs[model_name]
except:
print("Warning: Model number {} not in configs dict!".format(model_name))
exit(-1)
model = VGG(make_features(cfg), **kwargs)
return model
- train.py ( 训练网络 )
import os
import json
import torch
import torch.nn as nn
from torchvision import transforms, datasets
import torch.optim as optim
from tqdm import tqdm
from model import vgg
def main():
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print("using {} device.".format(device))
# 数据预处理
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]),
"val": transforms.Compose([transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])}
# 获取数据集
data_root = os.path.abspath(os.path.join(os.getcwd(), "../..")) # get data root path
image_path = os.path.join(data_root, "data_set", "flower_data") # flower data set path
assert os.path.exists(image_path), "{} path does not exist.".format(image_path)
train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "train"),
transform=data_transform["train"])
train_num = len(train_dataset)
# {'daisy':0, 'dandelion':1, 'roses':2, 'sunflower':3, 'tulips':4}
flower_list = train_dataset.class_to_idx
cla_dict = dict((val, key) for key, val in flower_list.items())
# write dict into json file
json_str = json.dumps(cla_dict, indent=4)
with open('class_indices.json', 'w') as json_file:
json_file.write(json_str)
batch_size = 32
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8]) # number of workers
print('Using {} dataLoader workers every process'.format(nw))
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size, shuffle=True,
num_workers=nw)
validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "val"),
transform=data_transform["val"])
val_num = len(validate_dataset)
validate_loader = torch.utils.data.DataLoader(validate_dataset,
batch_size=batch_size, shuffle=False,
num_workers=nw)
print("using {} images for training, {} images for validation.".format(train_num,
val_num))
# test_data_iter = iter(validate_loader)
# test_image, test_label = test_data_iter.next()
model_name = "vgg16"
net = vgg(model_name=model_name, num_classes=5, init_weights=True)
net.to(device)
loss_function = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.0001)
epochs = 30
best_acc = 0.0
save_path = './{}Net.pth'.format(model_name)
train_steps = len(train_loader)
for epoch in range(epochs):
# train
net.train()
running_loss = 0.0
train_bar = tqdm(train_loader)
for step, data in enumerate(train_bar):
images, labels = data
optimizer.zero_grad()
outputs = net(images.to(device))
loss = loss_function(outputs, labels.to(device))
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,
epochs,
loss)
# validate
net.eval()
acc = 0.0 # accumulate accurate number / epoch
with torch.no_grad():
val_bar = tqdm(validate_loader)
for val_data in val_bar:
val_images, val_labels = val_data
outputs = net(val_images.to(device))
predict_y = torch.max(outputs, dim=1)[1]
acc += torch.eq(predict_y, val_labels.to(device)).sum().item()
val_accurate = acc / val_num
print('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %
(epoch + 1, running_loss / train_steps, val_accurate))
if val_accurate > best_acc:
best_acc = val_accurate
torch.save(net.state_dict(), save_path)
print('Finished Training')
if __name__ == '__main__':
main()
- predict.py ( 使用训练好的模型网络对图像分类 )
import os
import json
import torch
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
from model import vgg
def main():
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
data_transform = transforms.Compose(
[transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# load image
img_path = "../tulip.jpg"
assert os.path.exists(img_path), "file: '{}' dose not exist.".format(img_path)
img = Image.open(img_path)
plt.imshow(img)
# [N, C, H, W]
img = data_transform(img)
# expand batch dimension
img = torch.unsqueeze(img, dim=0)
# read class_indict
json_path = './class_indices.json'
assert os.path.exists(json_path), "file: '{}' dose not exist.".format(json_path)
json_file = open(json_path, "r")
class_indict = json.load(json_file)
# create model
model = vgg(model_name="vgg16", num_classes=5).to(device)
# load model weights
weights_path = "./vgg16Net.pth"
assert os.path.exists(weights_path), "file: '{}' dose not exist.".format(weights_path)
model.load_state_dict(torch.load(weights_path, map_location=device))
model.eval()
with torch.no_grad():
# predict class
output = torch.squeeze(model(img.to(device))).cpu()
predict = torch.softmax(output, dim=0)
predict_cla = torch.argmax(predict).numpy()
print_res = "class: {} prob: {:.3}".format(class_indict[str(predict_cla)],
predict[predict_cla].numpy())
plt.title(print_res)
print(print_res)
plt.show()
if __name__ == '__main__':
main()

















 519
519

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









