






六相永磁同步电机的电驱控制系统是目前比较常用的多相电机控制,其控制自由度是控制方案的主要优势点,然而一般常用的方法即PI控制方案,在调节仿真和做实验的时候存在参数整定非常的困难,有时候闭环的效果并不是很好,因此对控制方案做了相关的改进
为解决传统矢量控制策略存在PI参数整定困难、需要进行多次坐标变换、耗费大量的计算时间等问题,引入了模型预测控制策略,模型预测控制具有快速响应、可用于非线性和灵活设计的优点,可以通过采用价值函数同时控制多个子空间。
所设计的控制方案基于以下拓扑结构:

首先,根据电机转速设定值n*与采集的六相对称永磁同步电机转速n,经过转速控制器后得出的q轴电流给定值iq*;
第二步,采集六相对称永磁同步电机的六相相电流IA、IB、IC、IU、IV、IW,通过矢量空间解耦坐标变化得到d轴、q轴、x轴以及y轴电流id、iq、ix,iy将经过坐标变换得到的电流作为当前时刻的d轴、q轴、以及x轴以及y轴电流值id(k)、iq(k)、ix(k)、iy(k)。
其中,采用矢量空间解耦坐标变换方法,将自然坐标系的各个变量转换到d轴、q轴、x轴以及y轴的分量,矩阵为:
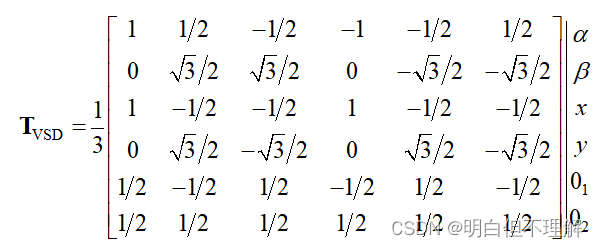
其中,θe为转子位置电角度。
将经过坐标变换得到的电流作为当前时刻的d轴、q轴、x轴以及y轴电流值id(k)、iq(k)、ix(k)、iy(k)。
第三步,参考电压ud、uq、ux以及uy通过电压矢量计算获得,根据六相逆变器在α-β与x-y子空间的64个电压,电压矢量Vi表示为:

式中,Vi表示电压矢量在α轴、β轴、x轴以及y轴对应的分量,i=1,2,….,64,j=1,2,….,6,S( j, i)表示所选电压矢量Vi对应的六相逆变器开关状态。
由于变化矩阵所述为α轴、β轴、以及x轴以及y轴对应的分量,为了得到d轴、q轴、以及x轴以及y轴对应的参考电压ud、uq、ux以及uy,需要对每个电压矢量对应的α轴、β轴分量进行Park变化,从而得到每个电压矢量对应的参考电压。
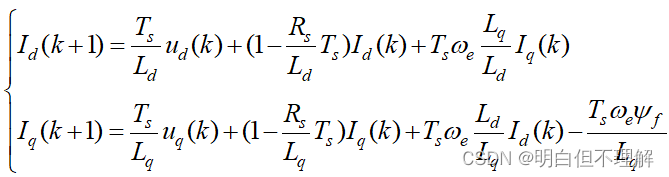
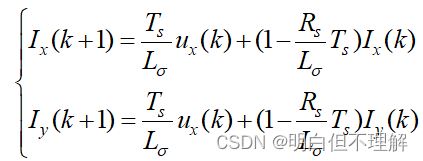
接着,将当前时刻的电流值id(k)、iq(k)与电压矢量对应的参考电压值ud、uq、u01通过离散化公式计算下一周期的预测值电流id(k+1)、iq(k+1)、其中d轴与q轴分量控制电机的机电能量,电流离散化公式表示为:
第四步,计算所得的下一周期预测电流与d轴、q轴、以及01轴给定参考值iq*、id*、i01*输入到价值函数中,利用遍历法并通过价值函数计算后,选择下一周期所用的电压矢量
![]()
第五步,通过不同模式下的价值函数选择最优电压矢量,得到最优电压矢量对应的下一个周期内开关管通断状态,以其作为六相逆变器驱动信号,将模型预测控制器输出的六相逆变器驱动信号输入到六相逆变器模块中,从而实现对六相电驱重构型车载充电系统中d轴、q轴的控制。
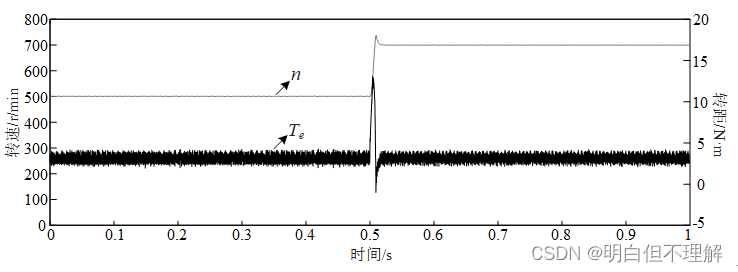
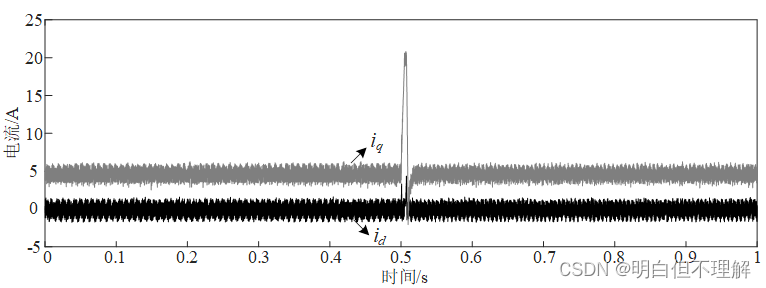
最后,为了验证这种方案的可行性,我们搭建了一个仿真,仅介绍仿真结果,如下所示。电机转速n与转矩仿真Te结果如图所示,在0.5s时刻电机转速能够快速跟随给定值,并且在0.02s内完成转速调节,在转速调节过程中,电机输出转矩迅速恢复,完成电机转速调节,稳定状态下电机输出转矩恒定为3N∙m。在稳定转速状态下,q轴电流iq保持为0,d轴电流保持在5A,在0.5s转速出现增加之后,d轴、q轴电流快速恢复原值。
上述方案仅仅是六相对称电机的MPC控制方案,且仅仅是驱动方面,非常的浅显,只是作为本人做课题过程中的一些基础知识吸收表达,如有错误,请指正。















 1155
1155











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









