






最近做了一个关于双电机同步控制的项目,所以去了解了一下目前的同步控制方案,如比较常用的并行控制、主从控制、交叉耦合控制、偏差耦合控制等结构。针对每个控制结构的优缺点就不做详细说明了,由于本次研究的对象是双电机,所以最终选定的方案还是在交叉耦合控制。
一、交叉耦合控制介绍
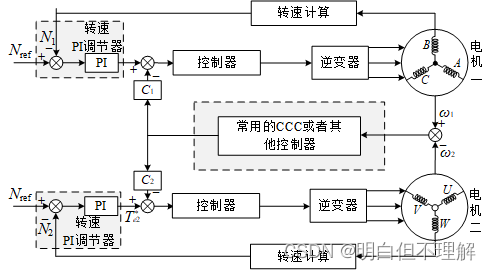
交叉耦合控制是由Koren提出的,主要就是在正常的转速控制后加入一个转速差反馈的控制,多增加一个闭环,通过转速差反馈回路可以有效的减少电机之间的转速差值,进而实现电机转速同步控制。常用的控制框图如下:
二、仿真环境的搭建
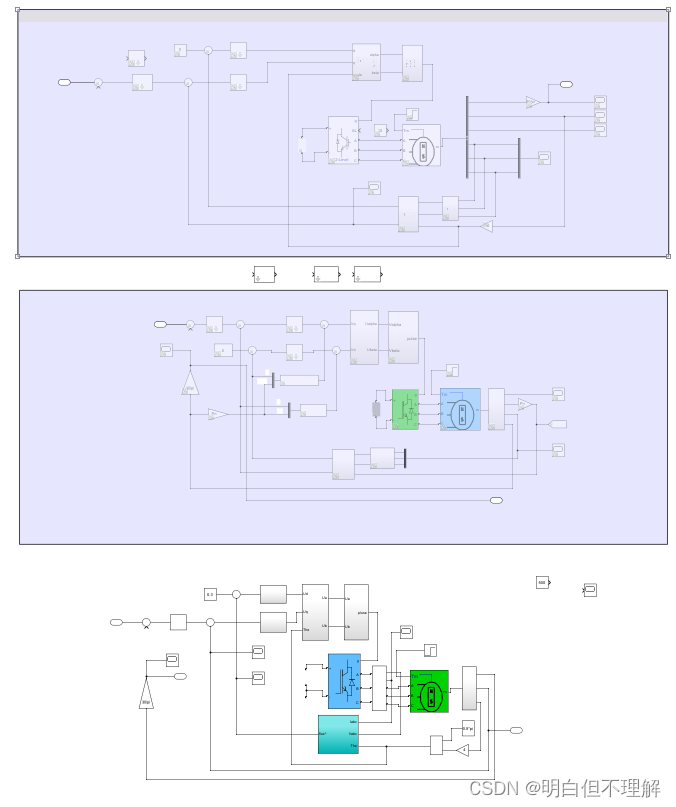
根据上面的控制框图,搭建了一个很简单的控制,就是单个电机先去调速,用《现代永磁同步电机控制原理及MATLAB仿真》这本书的三相电机控制就好,我这里的仿真主要是采用DTC控制,所以用了这本书第四章的仿真,至于为什么用DTC控制,这个是跟你转速差反馈环所用的控制器是有关系的,需要自己的确定。
接下来看一下自己的仿真:
1、整体仿真
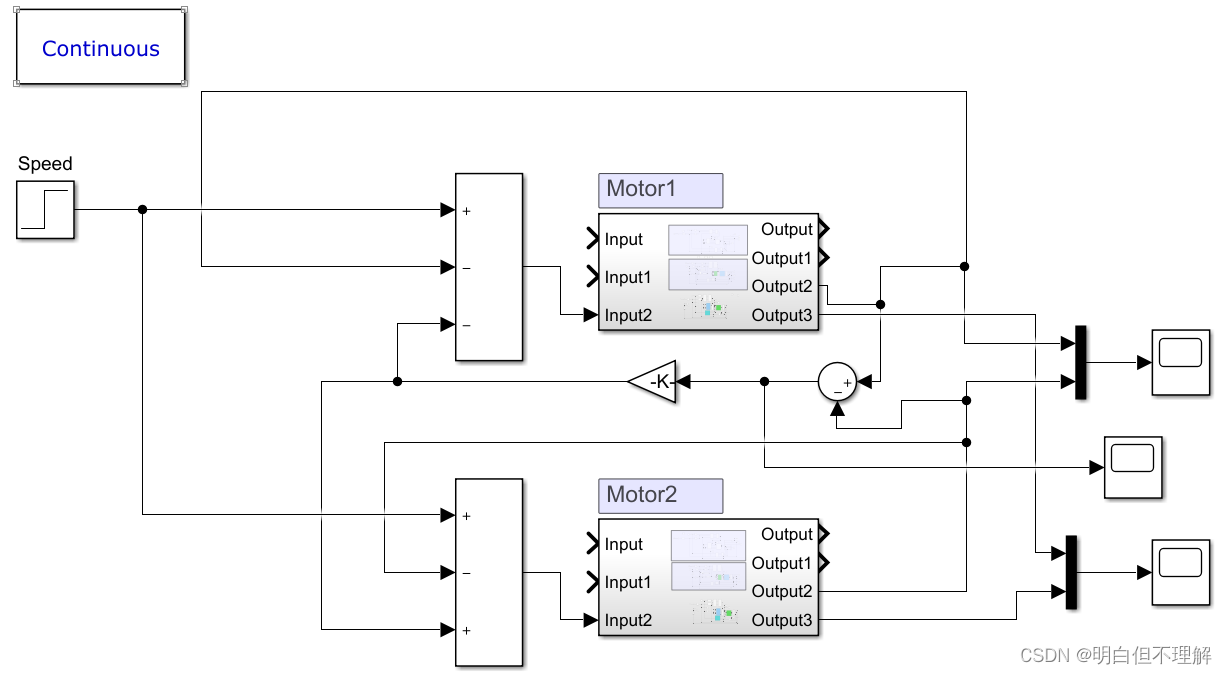
2、可以看到模块中我其实搭建了很多个三相电机的模型,但是效果都不是特别好,可能主要是因为自己也比较懒,不想去调PI而已
三、仿真结果
转速给定值为500r/min,电机一的负载在0.1s时由空载状态增加到负载为2N∙m,电机二的负载在0.1s时由空载状态增加到负载为1N∙m。
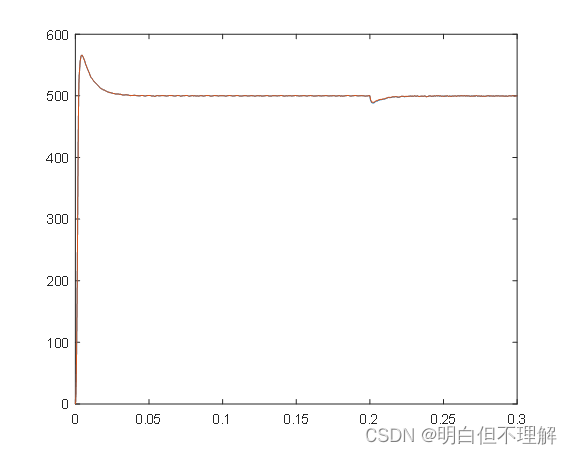
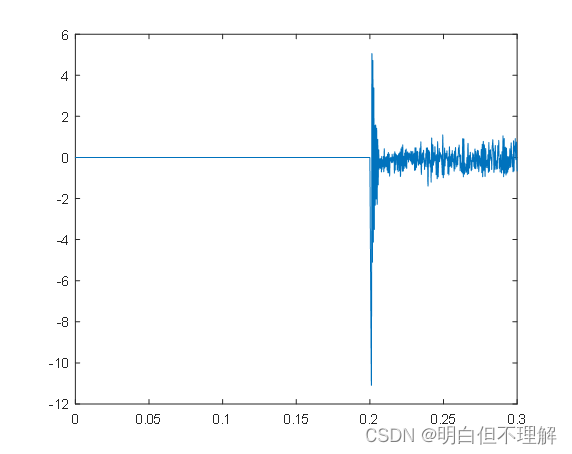
左图是两个电机转速图,右图是转速差,其实可以看到仿真的控制效果不是特别好,一部分原因也是自己没有很仔细的去调参数,但是作为一个很基础的仿真控制模型应该够用。
简简单单记录一下自己的想法,图片和仿真都是自己搭建的,可能描述会有错误,后续会继续修改。
以上。
需要仿真的窗口我

















 1801
1801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









