






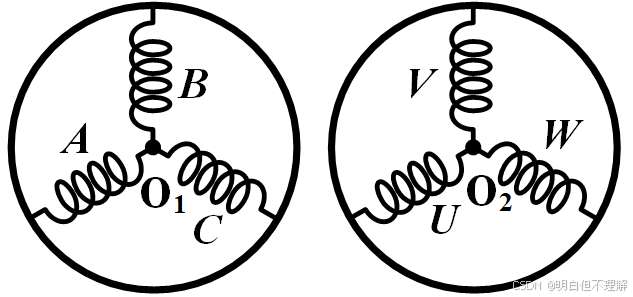
本次测量电机的一台非对称六相电机,即两套绕组空间角度相差30°。
针对六相电机的两套绕组,需要测量相应的相序,主要分为以下几个步骤:
步骤一:确定两套绕组(ABC与UVW)
首先用万用表将ABC与UVW相绕组分开,并将负端分别连接。此时,电机一段为两个中性点,另一端为六相绕组的端子。
步骤二:利用拉位置的程序找到假定的ABC相与UVW相的顺序。
根据之前确定好的电机正转方向,进行拉位置程序运行,测试六相电机相序。
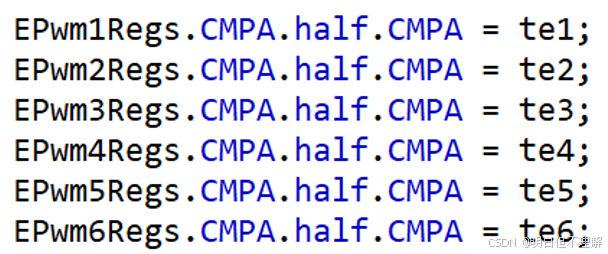
其中,EPWM1、2、3为A、B、C的管子占空比给定,而EPWM4、5、6为U、V、W的管子占空比给定。
1、拉假A相位置(给EPWM1Reg = 0),此时电机轴定位在假A相,PC端转子位置角为0;
接着,将EPWM1Reg改为3750(即让上管关断),EPWM2Reg=0,拉假B相位置,此时观察电机实际转动方向以及PC端转子位置角值,正确假B相的现象为:电机正转较大幅度、转子位置角增加约24度。因为B相滞后于A相,且相差电角度120度。
2、重复上述步骤找到假C相。
找到ABC正转顺序之后可以测另一套绕组,同样采用上述的办法能够找到UVW的顺序。
上述步骤是参考六相PMSM电驱平台及电机相序、参数测试流程_6相电机-CSDN博客这篇博客做的分析
但是这样会存在一个问题,在每次转电机之前都要进行拉位置的程序,而且直接进行拉位置程序的时候并不能够代表A相一定能够对其D轴。因此,我们可以通过找到电机A相与D轴之前的差值,然后在启动电机时候进行补偿即可。
步骤三:测量实际的相序
将第二步测得的ABC相接入控制箱,然后用三相FOC程序对电机的偏差值进行计算。
test1=0 处于测试环境中
流程为:
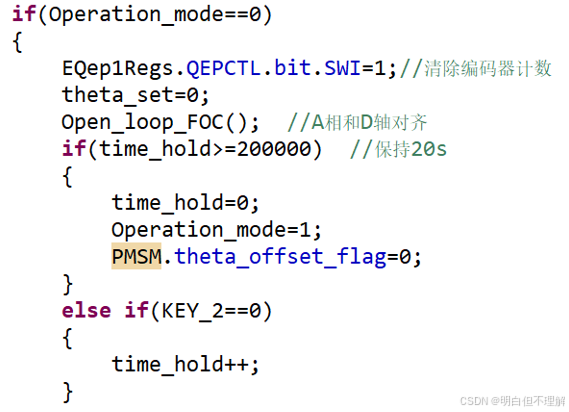
1、Operation_mode=0
清除编码器的计数值,然后让A相与D轴对齐,也就是进行拉位置的程序,等待一段时间后Operation_mode=1;
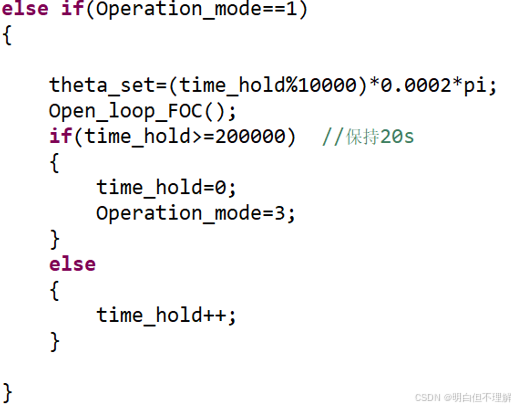
2、Operation_mode=1
在这个程序中,给theta_set赋值,让电机转动一周
theta_set=(time_hold%10000)*0.0002*pi;
能够得到位置对齐需要的脉冲数是多少,将所得的脉冲数对2000进行取余就能够得到需要补偿的角度偏差值。
3、举例说明
首先对一套绕组(称为绕组M)进行多次测量操作,得到的theta_offset=3191、3195、3192,取平均后为3193,3193%2000=1193,(1193/2000)*360=214.74°
说明这套绕组的A相与D轴之间的电角度为214.74°
接着对另一套绕组(称为绕组N)进行测量操作,得到theta_offset=3024、3025、3022,取平均后为3023,3023%2000=1023,(1023/2000) *360=184.14°
说明这套绕组的A相与D轴之间的电角度为184.14°
可以发现,两套绕组之间的差值为30°,由于绕组UVW滞后于绕组ABC 30°,因此,绕组M是ABC,绕组N是UVW。
PS:编码器的分辨率比较常用的是增量式光电编码器,它的分辨率又称为线数,比如2500线4倍频,那么它的分辨率就是2500*4=10000个脉冲。编码器的分辨率越高说明电机的最小刻度就越小,那么电机旋转的角位移也就越小,控制的精度也就越高。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









