







 本文记录了六相对称永磁同步电机相序的测试过程。先介绍了电机六相相位及合成磁链方向,说明了拉位置的方法。接着阐述了确定电机内外线ABC和UVW顺序的具体步骤,还分析了测试中出现电角度不变等问题的原因及解决办法。
本文记录了六相对称永磁同步电机相序的测试过程。先介绍了电机六相相位及合成磁链方向,说明了拉位置的方法。接着阐述了确定电机内外线ABC和UVW顺序的具体步骤,还分析了测试中出现电角度不变等问题的原因及解决办法。
最近又参与测试了一台六相对称永磁同步电机的相序,记录测试过程如下:
在测试电机相序之前,我们要对测试对象有一个基本了解。
1、六相对称电机的六相相位及其合成磁链的方向如图1所示,也就是说,ABC与UVW分别对应相差30°=pi/6。那么如果我电机相序位置对的话,假设先拉到A相位置对应电角度为0,再拉位置到B相,PC端观测电角度会增加pi*2/3=2.0943,差不多这么多。
2、怎么拉位置呢?六相电机的六桥臂驱动管,第一桥臂给满占,剩下桥臂关断的话,每次就会拉位置到第一个桥臂对应相。那我这样程序不用更改,每次更换接在第一桥臂上的电机相线就可以了。
好了,现在开始准备拉位置记数据测相序了。
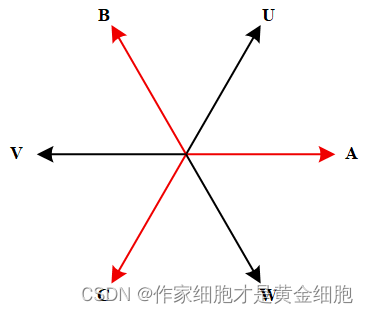
图1
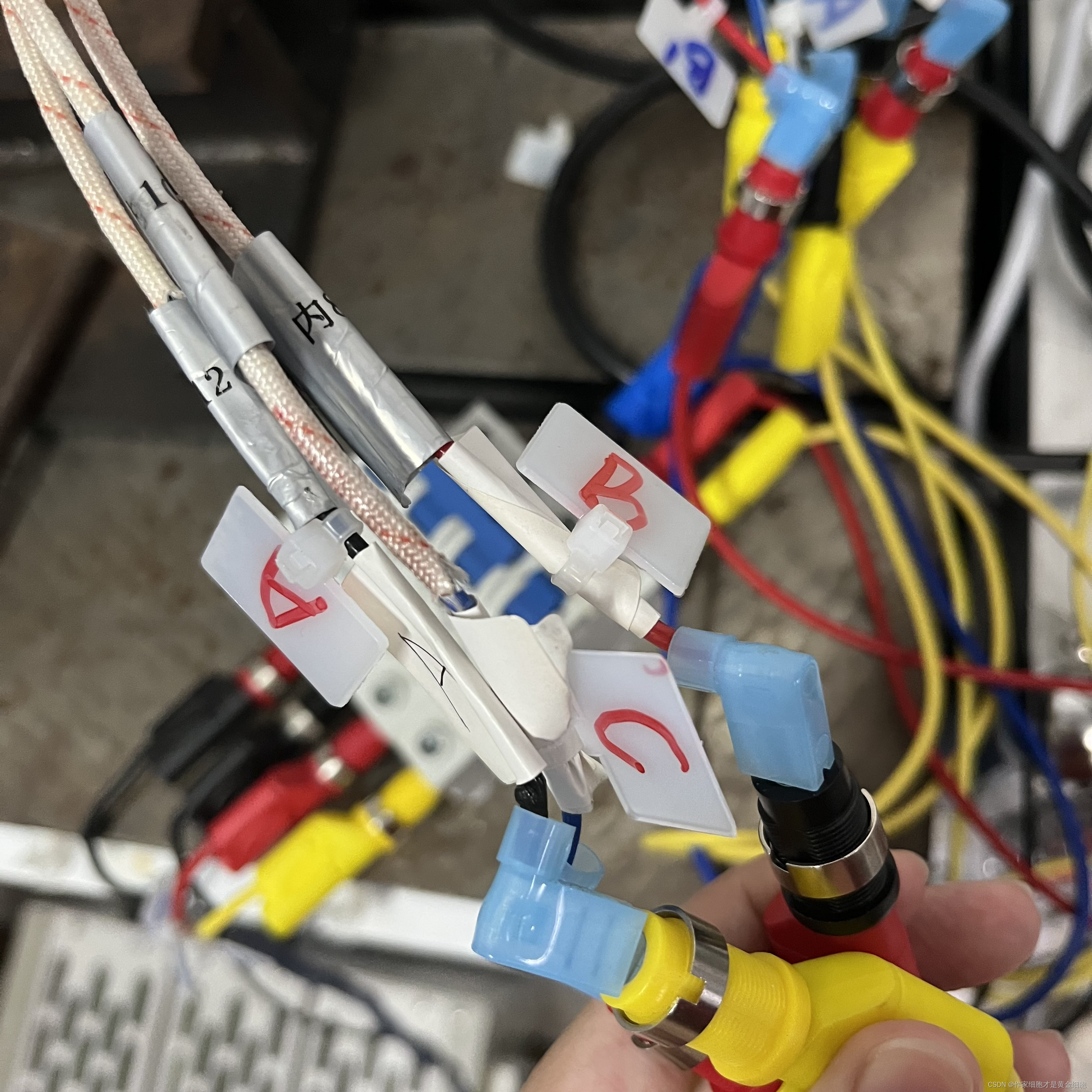
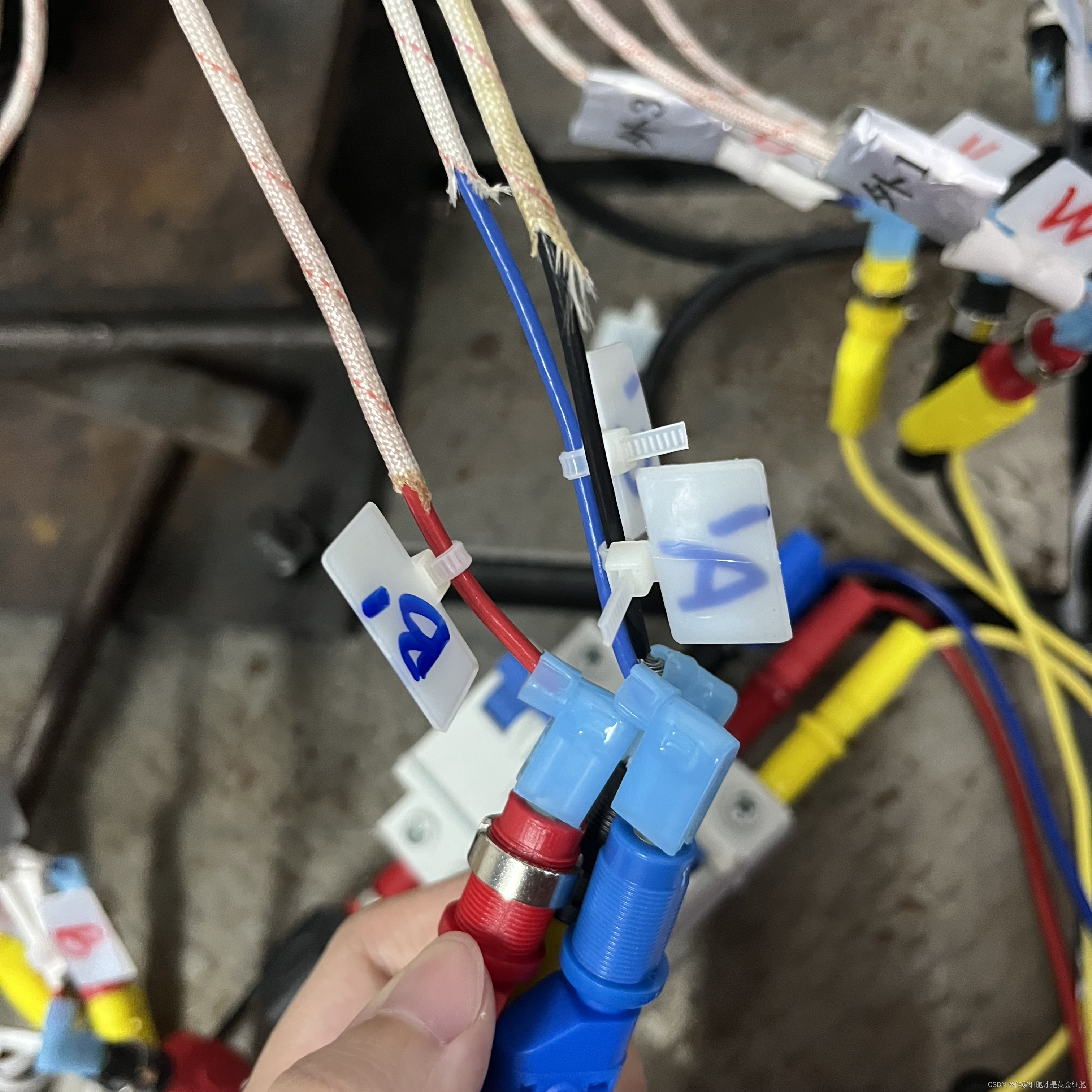
1、六相电机引出线上一般给有两套三相线分别接在一起的一捆,这是六相电机的两个隔离三相中性点,一般情况不用管,放在一边就可以了。另外六根线上面标有外3根,内3根。
我们的目的就是:确定内和外哪一套是ABC,哪一套是UVW,以及内、外的各三根线中ABC和UVW的真实顺序即可。
情况1:电机没有标内外,用万用表测各电机线与中性点间的通断,一个中性点对应3根通的电机线,分好类别。
2、将确定好为一组的3根线接到ABC桥臂上,另外一组接到UVW桥臂上。假定现在接在第一个桥臂上的为电机的A相,拉位置PC端电角度为0。然后ABC更换位置,拉B和C相线,在PC端记录转动方向和电角度的值。
ABC位置拉完后,就可以推断出这3根电机线的真实位置关系。但是问题是,不确定他们是ABC还是UVW,所以我们准备拉UVW了。
注:此时要把电机再拉回到A位置,让电角度归为0,仍以A为基准去判断UVW。
3、把ABC和UVW的3条电机线都调换,也就是现在ABC接在第4、5、6桥臂上,UVW接在第1、2、3桥臂上了,开始拉UVW位置并记录转动方向和电角度值。这一流程走下来后,就确定了第二套的3个电机相线之间的位置关系。再根据A相超前U相,判定哪套为ABC,哪套为UVW即可。
情况2:ABC测好了,换到UVW时,发现从A相电角度为0值拉位置到U相,电角度仍为0值不变。
emo:(我的六相电机难道是无相位差的两套三相电机的组合吗???)可是电机上标了六相对称电机嘛!看图:
还记得我们开头画的六相对称电机的磁链合成方向图吗,思考一下,什么情况下在转子电角度为0时,拉另一相位置时角度竟然不变。我放一张图2解释一下,便于理解。

图2
第一套电机相序位置测好后,我们要再拉回到A位置,也就是拉回到基准位置。此时拉第二套中的一相时,没有相位差。观察,如果我们现在拉的是真实V相位置,如果电机的输入端和输出端反掉了呢,我们拉的V位置合成的磁链方向不就和A相同方向了吗!也就是V’的方向。
好了,问题找到了。减掉一个中性点,把输入和输出对调,重新做好新的中性点和电机引出端。
情况3:提供一种角度,一组线的输入输出要确定好,哪套三相线对应哪个中性点,很重要!避免在上述情况下把电机接成开绕组模式。
如果此篇文章对您有帮助,记得评论告诉我(●'◡'●)


















 5555
5555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











