









仅供学习参考。
一、系统原理
变频调速控制的原理:变频调速技术的基本原理是根据电机转速与工作电源输入频率成正比的关系,通过改变电动机工作电源频率达到改变电机转速的目的。变频器就是基于上述原理采用交-直-交电源变换技术,电力电子、微电脑控制等技术实现的设备。在通用变频控制过程中,其主驱动控制为输入的磁通量,由于主磁通的大小可以直接影响到电机效率的问题,从而衍生VVVF(Variable Voltage and Variable Frequency/可变电压与可变频率)控制系统,即变频调速系统。 VVVF控制的逆变器连接电机,通过同时改变频率和电压,达到磁通恒定和控制电机转速,磁通恒定过程可以用反电势/频率近似表征,电机转速控制可以用恒压频比(频率成正比)的方式来实现。
矢量变频控制的原理:由于交流异步电机调速控制时候时需要进行电压、电流和频率等控制量的多变量协调控制,有电压、电流、和频率等几种独立的输入变量,而转速、磁通则是相对独立的输出变量。更为重要的,电机的输入电源是三相交流电源,需要协调控制三相电的幅值、频率、相位,才能实现电源的可控输出。交流异步电机的控制电压、电流、频率、磁通、转速之间又互相都有影响,可谓是一个强耦合的多变量系统。而直流电机的磁通由励磁绕组产生,该磁通可以电枢接电以前建立,且除弱磁调速时外,基本不参与系统的动态过程,直流机的控制比较简单的根本原因也在此。它的动态数学模型是一个自然且解藕、线性、单输入单输出〔SISO〕的系统 矢量控制模仿直流电动机的控制原理,根据异步电动机的动态数学模型,利用一系列坐标变换把定子电流矢量分解为励磁分量和转矩分量。对电机的转矩电流分量和励磁分量分别进行控制,在转子磁场定向后实现磁场和转矩的解耦,从而达到控制异步电动机转矩的目的。

图1 矢量控制原理
二、系统仿真模型及各模块工作原理

图2 交流异步电机矢量控制Simulink仿真
整体系统控制模块图如图2所示,主要环节可以分为六部分,分别是主电路模块(包含直流电源模块、桥式电路逆变器模块、交流异步电动机模块等)、IGBT驱动脉冲电路模块、磁场电流估计观测器模块、PI调节器模块(ATR/ApsiR/ASR,即速度控制单元、、励磁控制单元、电流环控制单元) 、矢量解耦控制模块、控制量给定模块。
2.1主电路部分
直流电源DC510V通过三相逆变器输出可控的三相交流电,电流脉冲发生器产生的脉冲Pulses通过g口直接控制该逆变器的三相电源输出,三相交流电直接输出到异步电机中使之受控运行,通过对电机模块的转速、转矩、三相电流等直接测量进行估计状态观测计算得到 PI调节器模块(ATR/ApsiR/ASR)需要的反馈量。

图3 交流异步电机矢量控制主电路
电源:本实验仿真采用的是DC510V直流的电源,除UPS等电池驱动外,在实际应用中主电路电源一般采用交-直-交的三相电源产生方式,如图所示。

图4 交-直-交
三相异步电动机:本实验采用的是三相异步电动机,又称“感应电动机”, 即转子置于旋转磁场中,在旋转磁场的作用下,获得一个转动力矩,因而转子转动。转子是可转动的导体,通常多呈鼠笼状。三相异步电机参数如图所示:鼠笼式异步电机,视在功率 4700VA,电压 380V,频率 50HZ,定子电阻 0.435Ω,电感 0.004H,转子电阻 0.816Ω,电感 0.004H,互感为 0.0693。
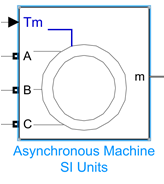
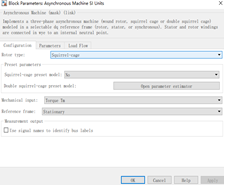
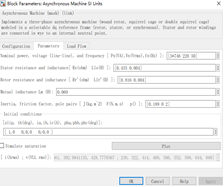
图5 交流异步电机参数
逆变器:逆变器是把直流电能(电池、蓄电瓶)转变成定频定压或调频调压交流电的转换器。它由逆变桥、控制逻辑和滤波电路组成,逆变器最主要的功能就是将直流电变化成交流电。
2.2 IGBT驱动脉冲电路模块
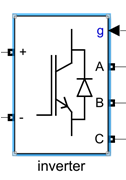
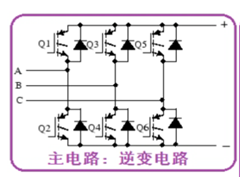
图6 逆变器原理
输入三个给定电流与三个实际电流进行比较,形成六个脉冲,输入到逆变器的IGBT产生三相电流。IGBT驱动电路的作用主要是将单片机脉冲输出的功率进行放大,以达到驱动IGBT功率器件的目的。在保证IGBT器件可靠、稳定、安全工作的前提,驱动电路起到至关重要的作用。IGBT是MOSFET管与双极晶体管的复合器件,既有MOSFET易驱动的优点,又具有功率晶体管电压、电流容量大等优点,其频率特性介于MOSFET管与功率晶体管之间,可正常工作于数十千赫兹的频率范围内。首先反馈测量到的三相电流与电机转速输出到电流磁场估计观测器,可获取磁链psir,电流ist,矢量相位角sin_cos。
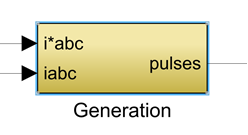

图7 IGBT驱动电路
2.3磁场电流估计观测器模块


图8 磁场电流估计观测器模块
交流异步电机(感应电机)不同于永磁同步电机,磁链可以直接通过转子测得,感应电机的实际测量反馈信号只包括的三相电流实际幅值与相位、电机实际转速、机械力矩。但是交流异步电机矢量闭环控制中需要的反馈信号包括转矩控制电流ist*及励磁控制电流ism*需要由磁链、转速、矢量控制的矢量相位、给定的磁链与给定转速计算得出,由于磁链无法直接测出,需要建立估计观测器,通过三相电流ia、ib、ic与电机转速w与电机控制的传递函数与电流矢量变换间接求得。因此,由电流磁场估计观测器计算得到的磁链psir,转矩电流ist可以用于期望转矩电流ist*与励磁电流ism*的闭环计算。
2.3 PI调节器模块
PI调节器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。它根据给定值r(t)与实际输出值c(t)构成控制偏差:
其中u(s)为为PI控制器的输出,e(t)为PI调节器的输入,Kp为比例系数,Kr为积分时间常数,通过改变PI调节器参数观察其动态性能如超调量、调节时间等,分析系统的性能。通过改变PI调节器参数观察其动态性能如超调量、调节时间等,分析系统的性能。在本次仿真分析中,有三个PI调节器,分别是ATR、ApsiR、ASR(速度环控制单元、电流环控制单元、磁链环控制单元),交流异步电机矢量控制的各个闭环PI调节器的分析如下:
调速PI控制:反馈测量得到的当前转速n与给定的期望转速n*偏差计算后到调速控制PI调节器ASR中进行比例积分运算,得到并输出期望的预期转矩控制信号Te*。


图9 ASR PI调节器模块
矩电流PI控制:反馈计算得到的磁链psir与转矩电流由转矩公式计算得到当前的转矩Te,Te与转速ASR PI调节器输出的期望转矩Te*作偏差比较后在与电流ATR PI调节器中进行比例积分运算,得到并输出期望的转矩控制电流ist*。
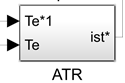

图10 ATR PI调节器模块
磁电流PI控制:反馈计算得到磁链psir与给定的期望磁链psir*作偏差计算后到磁链控制PI调节器Apsir中进行比例积分运算,得到并输出期望的励磁电流ism*。


图11 Apsir PI调节器模块
2.4矢量坐标变换控制模块
Dq0_to_abc模块是一个2r/3S坐标变换部分,根据三闭环产生的期望转矩控制电流ist*、期望励磁控制电流ism*与期望矢量转角sin_cos,经过坐标变换关系,实现dq坐标到三相坐标abc的准确变换,最终实现控制量(三相电流ia、ib、ic)的输出。abc_to_dq0模块也是一个3S/2r坐标变换部分,相当于上述环节的逆变换,它根据实际电机反馈量测量得到的三相电流(三相电流ia、ib、ic)与反馈量测量得到的矢量转角sin_cos,经由坐标变换关系,实现abc坐标到三相坐标dq的准确变换,最终实现所需反馈量(实际转矩电流ist*,实际励磁电流ism*)的估计计算值。


图12 矢量坐标变换模块
2.5控制量给定模块



图13 控制给定及参数设定模块
该模块主要是实现电机转速与磁链的给定输入,实现电机的转速期望控制。在此基础上,我为了更好表现系统的动态性能,设计了一个仿真实时切换开关,如图二所示,两挡转速与磁链给定输入,在仿真运行过程中进行切换,观测系统的阶跃响应。再者,本实验在实验仿真中引入给电机一个转矩阶跃输入,在电机运行到稳定后(4.5s时刻),给电机一个初值为55N/m的阶跃,观测负载变化的矢量PID电机控制系统的动态特性。
三、仿真运行结果分析
给定转速1250与磁链1.5,负载转矩阶跃输入设定为4.5s,55N/m,在0.77s手动切换到给定转速1500与磁链3,可得仿真波形。由上至下为电机反馈测量所得的实际转速、电机实际三相电流、转轴外加负载、电机转矩的动态响应特性曲线。分析1:电机刚启动时,转速转矩都为0,当突然加转速到1250时,电机的启动三相电流输入较大,随后电机转矩也逐渐升高,直到最大值。转速程斜坡线性升高,转矩电流逐渐降低。当达到额定速度时,转矩达到最小值,并恒定保持该状态。当在0.45秒时候突然加入55N/m的负载突变时,转速轻微下降,电流转矩突然升高,转速迅速回到到给定值。证明系统的动态特性良好,能胜任一定范围的负载变化。

图14 仿真波形

图15 仿真波形
分析2:上图是控制量的具体波形,从上至下分别是给定转速与实际转速波形、给定转矩与实际反馈转矩波形、给定dq分量与预期dq分量(dq电流)、给定磁场转角与实际估计磁场转角、给定dq合成电流与实际dq转换电流。可以看到转速经过最大允许电流升速后稳定到期望的转速,通过PI调节器对给定与实际的偏差进行控制,在0.3s内响应到稳定区间。进而依据转速要求给出的转矩大小,进而与反馈观测器计算得到的实际力矩,通过通过PI调节器对给定与实际的偏差进行控制,基本在0.1s就响应到了稳定区间。然而,dq分量的PI控制显得不够利息,波动较大,无法实时调节至一个较小的范围。磁场角sin_cos在仿真初期的偏差较大,但是经过三闭环调节后逐渐趋于比较接近的状态。Dq合成电流也基本满足PI控制的要求。
三、磁场观测器与转矩计算的检测原理
电磁转矩与运动学方程式:
从磁场能量来求解电磁转矩:

磁场能量:
磁场转矩:
传统的磁场转矩计算方式:

因此异步电动机的电磁转矩公式如下:

异步电机的拖动运动学方程如下:
在M-T(D-Q)轴下的电压方程的转子回路方程如下:

假定该电机仿真控制为理想的矢量控制,即转子磁链全都在M轴上有
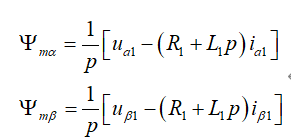
所以磁链本仿真实验中的psir可以由以下公式计算得

四、 低速检测误差的原因及改进方法

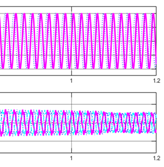
图15 低速检测误差示意
如图所示在低速时候的检测误差较大,原因是我们假定该电机仿真控制为理想的矢量控制,即转子磁链全都在M轴上有

但实际的系统并非理想的矢量控制,因为电机的电流给定转矩电流、励磁电流与期望的转矩电流、励磁电流偏差过大,所以导致磁链角度的检测误差较大。由于磁链的估计计算需要用到电机反馈的电流值。
改进方法:
采用间接检测法:利用直接测得的电压、电流或转矩信号,根据导出的电机模型计算,间接获得磁通信号。不过会受到数学模型的准确性、电机参数稳定性影响。
电机气隙(互感)磁链:















 362
362











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









