







 本文详细介绍了K-D Tree算法的原理,包括k-d树的构建算法和最邻近查找算法,并提供了Python实现。通过实例展示了如何在二维空间中构建k-d树以及查找最近邻的过程,探讨了在高维数据下k-d树的性能问题和适用场景。
本文详细介绍了K-D Tree算法的原理,包括k-d树的构建算法和最邻近查找算法,并提供了Python实现。通过实例展示了如何在二维空间中构建k-d树以及查找最近邻的过程,探讨了在高维数据下k-d树的性能问题和适用场景。
K-D Tree 算法
k−d tree k − d t r e e 即 k−dimensional tree k − d i m e n s i o n a l t r e e ,是一种分割k维数据空间的数据结构,常用来多维空间关键数据的搜索(如:范围搜素及近邻搜索),是二叉空间划分树的一个特例。通常,对于维度为 k k ,数据点数为 的数据集, k−d tree k − d t r e e 适用于 N≫2k N ≫ 2 k 的情形。
k-d tree算法原理
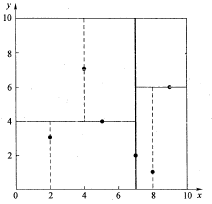
为了避免比较生硬苦涩的文字说明,这里我采用简单的例子表明 k−d tree k − d t r e e 算法。假设有6个二维数据点 {
(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)} { ( 2 , 3 ) , ( 5 , 4 ) , ( 9 , 6 ) , ( 4 , 7 ) , ( 8 , 1 ) , ( 7 , 2 ) } 数据点位于二维空间内(如图1所示)。k-d树算法就是要确定图1中这些分割空间的分割线(多维空间即为分割平面,一般为超平面)。下面就要通过一步步展示k-d树是如何确定这些分割线的。
k−d tree k − d t r e e 算法可以分为两大部分,一部分是有关k-d树本身这种数据结构建立的算法,另一部分是在建立的k-d树上如何进行最邻近查找的算法。
k-d树构建算法
首先列出构建k-d树的伪代码见表1,其中k-d树每个节点中主要包含的数据结构见表2。(参考于王永明 王贵锦 编著的《图像局部不变特性特征与描述》)
| 算法:构建k-d树(createKDTree) |
|---|
| 输入:数据点集Data-set和其所在的空间Range |
| 输出: Kd,类型为Kd-tree |
| 1 If Data-set 是空的,则返回空的 Kd-tree |
| 2 调用节点生成程序: (1)确定split域:对于所有描述子数据(特征矢量),统计它们在每个维上的数据方差。以SURF特征为例,描述子为64维,可计算64个方差。挑选出最大值,对应的维就是split域的值。数据方差大表明沿该坐标轴方向上的数据分散得比较开,在这个方向上进行数据分割有较好的分辨率; (2)确定Node-data域:数据点集Data-set按其第split域的值排序。位于正中间的那个数据点被选为Node-data。此时新的Data-set’ = Data-set\Node-data(除去其中Node-data这一点)。 |
| 3 dataleft = {d属于Data-set’ && d[split] ≤ Node-data[split]} Left_Range = {Range && dataleft} dataright = {d属于Data-set’ && d[split] > Node-data[split]} Right_Range = {Range && dataright} |
| 4 left = 由(dataleft,Left_Range)建立的k-d tree,即递归调用createKDTree(dataleft,Left_ Range)。并设置left的parent域为Kd; right = 由(dataright,Right_Range)建立的k-d tree,即调用createKDTree(dataleft,Left_ Range)。并设置right的parent域为Kd。 |
| 域名 | 数据类型 | 描述 |
|---|---|---|
| Node-data | 数据矢量 | 数据集中某个数据点,是n维矢量(这里也就是k维) |
| Range | 空间矢量 | 该节点所代表的空间范围 |
| split | 整数 | 垂直于分割超平面的方向轴序号 |
| Left | k-d树 | 由位于该节点分割超平面左子空间内所有数据点所构成的k-d树 |
| Right | k-d树 | 由位于该节点分割超平面右子空间内所有数据点所构成的k-d树 |
| parent | k-d树 | 父节点 |
以上述举的实例来看,过程如下:
由于此例简单,数据维度只有2维,所以可以简单地给 x,y x , y 两个方向轴编号为 0,1 0 , 1 ,也即split= {
0,1} { 0 , 1 } 。
(1)确定split域的首先该取的值。分别计算 x,y x , y 方向上数据的方差得知 x x 方向上的方差最大,所以split域值首先取
,也就是 x x 轴方向;
(2)确定Node-data的域值。根据
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









