






 本文介绍了如何利用RflySim平台简化PX4的软件在环(SIL)和硬件在环(HIL)仿真过程,包括MATLAB/Simulink环境下的控制算法设计、一键启动脚本,以及HIL仿真中硬件接口的实时通信。
本文介绍了如何利用RflySim平台简化PX4的软件在环(SIL)和硬件在环(HIL)仿真过程,包括MATLAB/Simulink环境下的控制算法设计、一键启动脚本,以及HIL仿真中硬件接口的实时通信。
PX4软件系统是一款开源的无人机飞行控制系统,广泛应用于各种无人航空器平台。为了验证和测试PX4系统的性能以及集成的算法,我们往往需要采用软硬件在环仿真(Software-in-the-Loop, SIL)和硬件在环仿真(Hardware-in-the-Loop, HIL)的方式来验证。本文将介绍如何快速启动SIL、HIL仿真验证。
PX4软件官方的SIL、HIL仿真实现
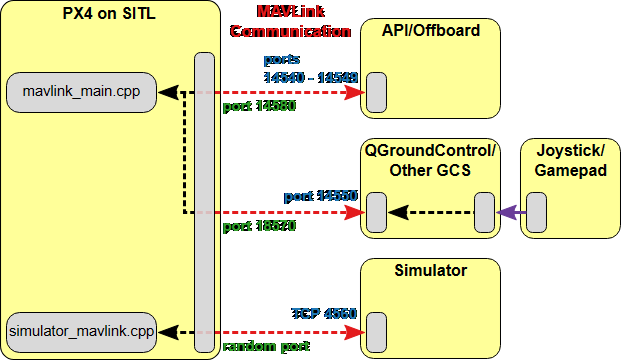
软件在环仿真是一种仿真技术,广泛应用于汽车、航空航天、工业自动化等多个领域。它主要是利用高级的软件模型来模拟实际的硬件系统行为,在软件开发早期进行功能和性能验证。基于PX4的软件在环仿真官方流程有详细的说明[1],其配置过程较为繁琐,配置环境的要求为Linux环境,且需要在Github中Clone源码,还需要安装仿真器(如:JMAVSim、Gazebo等),通过地面站软件来控制飞机从而实现整体的软件在环仿真的闭环,整体框架如下:
基于RflySim平台的SITL、HITL仿真实现
RflySim平台(下载链接:https://rflysim.com/download.html)
是一套专为无人平台控制系统开发、大规模集群协同、人工智能视觉等前沿研究领域研发的高可信度的无人控制系统开发、测试与评估平台。它是基于Pixhawk /PX4 和MATLAB/Simulink 生态系统或工具链,并且提供一键安装和配置环境的方式,可大大降低开发时间,提高开发效率。从算法框架的前期设计、搭建、仿真以及实飞提供完整的实验流程支持。

针对SIL仿真,RflySim整个阶段都可在MATLAB环境下进行,利用给定多旋翼仿真模型和例程,在Simulink中进行控制算法设 计,并正确连接模型和控制器,确保输入输出信号与实际多旋翼系统一致。类似于实际多旋翼系统,多旋翼模型将传感器数据或状态估计信息(例如,姿态角、 角速率、位置和速度等)发送给控制器,控制器将每个电机PWM控制指令发回给模型,从而形成一个软件 在环仿真闭环系统。在本阶段,用户可以观察控制性 能,自行修改或设计控制器来达到期望的性能需求。 同时,用户也可以将在Simulink中搭建的自定义载具的动态模型,通过提供的自动生成DLL文件程序,将其打包生成DLL文件,复制到平台的CopterSim软件中,再通过一键启动SILRun.bat脚本,一键启动SIL仿真。
相比较SIL仿真,HIL仿真时用户将设计完成的控制器上传到PX 4软件支持的飞控硬件环境下,通过串口线直接连接的方式与CopterSim软件中的DLL模型进行通信,CopterSim将传感器数据(例如,加速度计、气压计、磁力 计等)通过USB数据线发送给飞控硬件系统;Pixhawk系中的PX4自驾仪软件将收到传感器数据进行滤波和状态估计, 将估计的状态信息通过内部的uORB消息总线发送给控制器;控制器再通过USB数据线将每个电机的PWM控制指令发回 给CopterSim,从而形成一个硬件在环仿真闭环。
在实飞测试阶段,CopterSim的DLL文件模型进一步由真实载具替代,传感器数据直接由传感器芯片感知飞行运动状态得到,控制器信号直接输出给电机,从而实现真实载具的控制。需要注意的是,无论是HIL仿真还是SIL仿真,其仿真模型都难以与真实飞机保持完全一致,因此进一步的参数调整也是必要的。
一键启动SITL、HITL仿真演示
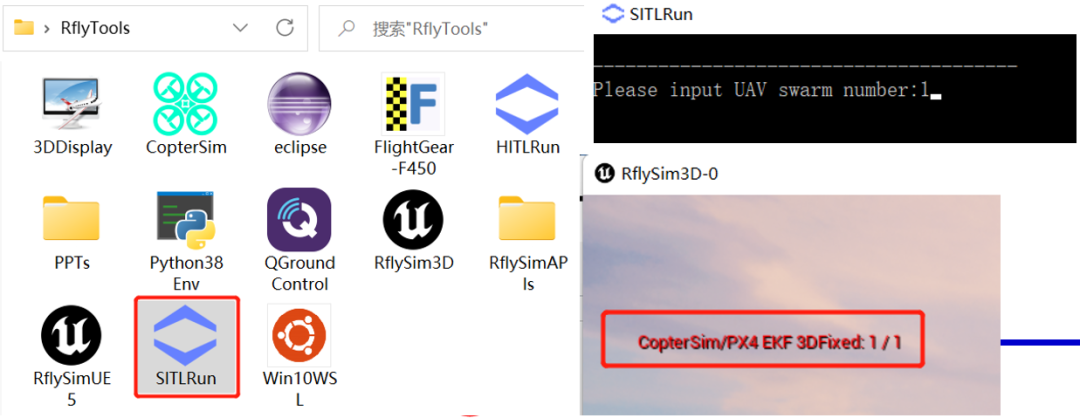
SITL仿真:安装完成RflySim平台之后,进入桌面“RflyTools”文件夹,双击“SITLRun”快捷方式,并输入1,再回车。 等到RflySim3D显示“*** EKF 3DFixed”(CopterSim上也会显示),表示飞控 已经初始化完毕,可以开始控制自主飞行。
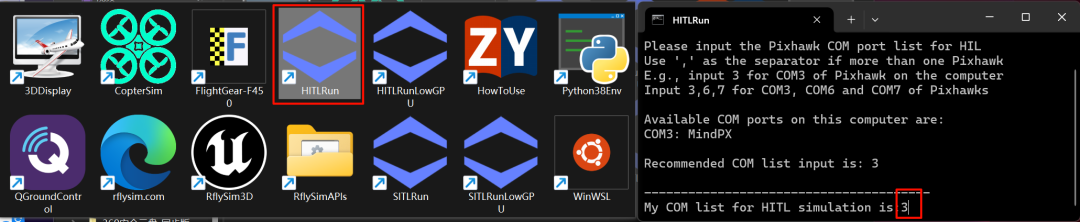
HITL仿真:通过USB线将飞控与电脑链接,进入桌面“RflyTools”文件夹,双击“HITLRun”快捷方式,并输入1,再回车。 等到RflySim3D显示“*** EKF 3DFixed”(CopterSim上也会显示),表示飞控 已经初始化完毕,可以开始控制自主飞行。
参考文献:
1.https://docs.px4.io/main/en/simulation/
2.https://rflysim.com/doc/zh/
3.https://zhuanlan.zhihu.com/p/227819106


















 158
158

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









