







 本文介绍了在无人系统研发中如何利用三维可视化仿真技术,如RflySim平台,提高数据的直观性和分析效率。文章详细描述了RflySim3D与CopterSim、Python和Simulink的交互,以及如何自定义无人机模型并将其导入RflySim3D进行仿真。
本文介绍了在无人系统研发中如何利用三维可视化仿真技术,如RflySim平台,提高数据的直观性和分析效率。文章详细描述了RflySim3D与CopterSim、Python和Simulink的交互,以及如何自定义无人机模型并将其导入RflySim3D进行仿真。
一.技术背景
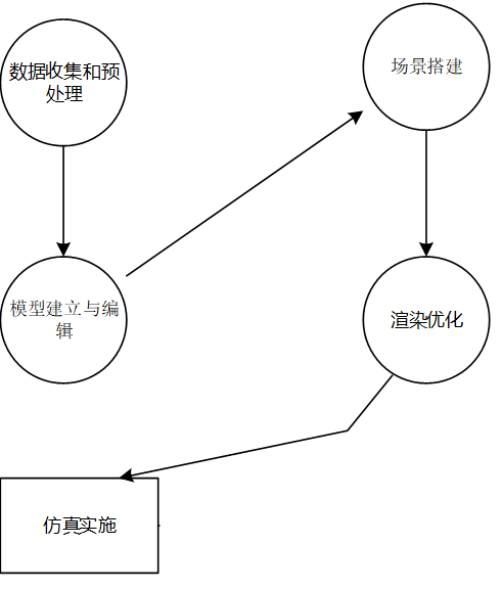
在无人系统研发过程中,需要进行大量的运动控制系统半物理实时仿真实验,传统仿真界面的运动轨迹显示多采用的是二维曲线形式,运动过程和状态是通过文本数据显示。随着数据量的增加,该方式缺乏直观性,不易观察、理解和分析,不利于挖掘隐藏于数据中的本质特性;而一幅逼真图像包含的信息则囊括了曲线和文本显示的信息。因此,将三维可视化仿真技术应用到无人系统仿真中,可以使系统数据以更自然、更易理解的图像形式展示出来,逼真的再现无人系统运行全过程。三维仿真实现路线图如下图所示:
二. RflySim平台介绍
在无人系统仿真领域已经出现了不少高逼真三维仿真平台,主要包括以下几个:AirSim;Gazebo;V-REPCARLA;MORSE;FlightGoggles等。
上述平台大多只支持特定载具(多旋翼、无人车、机器人等)的开发,而且适用的开发阶段主要是机器视觉或人工智能等上层算法开发。目前市面上仍然缺乏适用于各类无人系统载具类型,以及覆盖从底层控制器设计、上层智能决策算法开发、后期自动测试与安全评估等的全流程开发平台,这也是RflySim平台开发的初衷,其中的RflySim3D/RflySimUE5的三维引擎也弥补了目前市面上三维引擎对无人系统可视化方面的不足。
RflySim3D与其他软件交互是通过UDP实现的,RflySim平台提供了Python、Simulink的接口,它们都是通过UDP与RflySim3D交互的。RflySim3D在RflySim仿真平台中所处的位置如下图所示:
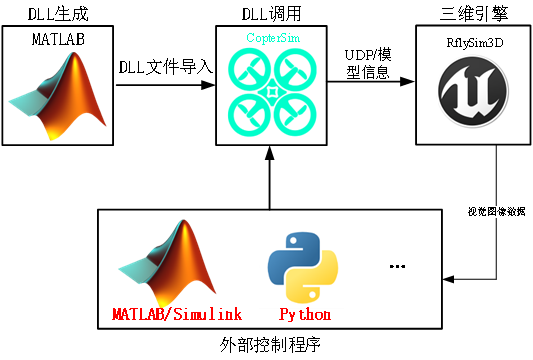
CopterSim会根据从Pixhawk(或者PX4SITL)传入的电机控制数据解算出无人机当前的状态(主要是位置、姿态数据)ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 161
161

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









