






一.技术背景
上两篇文章我们学习了自定义三维模型如何在RflySim中实现仿真和三维场景导入RflySim的实验,本篇我们将两个教程合并在一起介绍,学以致用,实现最终在RflySim平台中完成仿真相关实验。
RflySim是一个用于无人系统开发的仿真平台,包含免费版、高级版、企业定制版三个版本。平台主要功能是提供一个仿真环境,供用户进行无人系统的设计、开发和测试。用户可以通过RflySim平台进行软在环仿真和硬件在环仿真,也可以进行集群控制算法的开发和仿真。
平台提供高逼真的3D视景,提供源码和教程帮助开发者在虚幻(UnrealEngine)中搭建高度逼真的3D场景,用于室内外环境仿真或者基于视觉算法的开发;场景支持物理碰撞引擎,全球地形和地图,OSGB+Cesium倾斜摄影视景地图导入,自定义GPS坐标,任意多窗口切换观察,RGB、深度、灰度、IMU、激光雷达等传感器数据输出,支持共享内存或者UDP图片直发指定IP地址,可用于机载计算机硬件在环SLAM仿真。
二. 三维模型与场景导入
RflySim3D是RflySim平台的核心三维显示软件,它基于UE4和UE5引擎开发,具备高逼真的虚拟现实显示效果,用户可以通过RflySim3D来导入和展示他们的三维模型和场景。
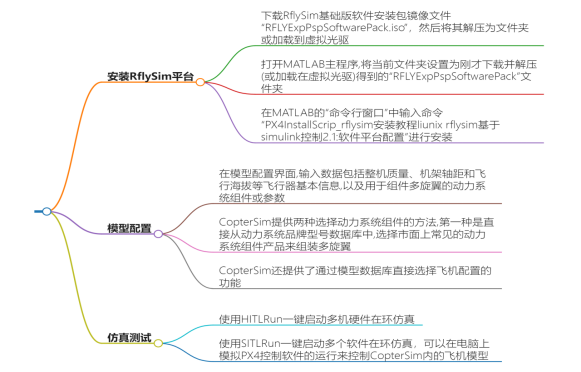
导入模型的两种方式:1.从动力系统品牌型号数据库中选择常见产品来组装多旋翼;2.通过自定义动力系统组件参数功能,模拟任意动力系统组件。
具体流程如下图所示:
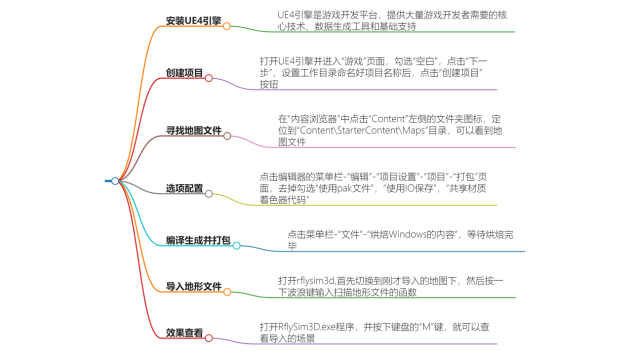
用户可以通过UE4引擎来创建和导入他们的三维场景,步骤包括创建项目、寻找地图文件、选项配置和编译生成并打包,具体流程如下图所示:
三. 实现仿真
导入模型和场景后,用户可通过RflySim平台来进行仿真,如下图所示可看到导入的三维模型和场景:

用户可以通过SITLRun一键启动脚本来快速启动软件在环仿真。在这种模式下,可以在电脑上模拟PX4控制软件的运行来控制CopterSim内的飞机模型,因此不需要插入Pixhawk硬件就可以进行闭环控制仿真。
用户可以通过HITLRun一键启动脚本来快速启动硬件在环仿真。仿真开始后,CopterSim会控制仿真的开始与停止,并实时显示Pixhawk自驾仪返回提示消息,显示仿真模型的位置、姿态等信息。
四. 仿真结果展示
RflySim基于UnrealEngine实时三维渲染引擎开发了面向无人的实时视景软件RflySim3D/RflySimUE5,它可以接收局域网内的所有飞机数据并集中实时显示在场景中,同时支持单独配置并获取到特定飞机的特定机载摄像头。此软件也支持自行设计并导入三维场景和飞机模型,且操作非常简单,支持直接使用UE4场景库中的海量三维场景和飞机模型,同时支持用3DsMax和AutoCAD等软件自行制作三维场景和飞机模型并导入UE4。下图分别展示了平台目前自带的四旋翼室内飞行、小车街区行驶、六旋翼森林穿梭和固定翼山脉巡航的三维场景。

五. 常见问题及解决办法
1.模型导入后位置不正确
解决方法:在导入时,通过选择正确的坐标系和相应的参考点,将模型正确地放置在场景中。
2.模型导入后纹理质量不高
解决方法:在3D设计软件中重新创建材质,或者导入您自己的材质库。
3.模型导入后,部分组件或材料缺失
解决方法:在导入模型之前,确保您的项目中已经包含了所需的所有组件和材料。
4.大尺寸模型导入时,电脑出现卡顿或崩溃现象
解决方法:在导入之前将模型进行优化处理,例如删除一些不必要的小零件或减少面片数等。
5.模型导入RflySim平台后,无法正常显示
解决方法:检查模型是否符合RflySim平台的支持格式,如.obj、.fbx、.3ds、.dae等。如果格式不兼容,可能需要转换模型格式。
6.在RflySim平台中,无法找到已导入的模型
解决方法:在RflySim平台中检查是否已正确设置模型的路径和文件夹,如果模型文件没有放在指定路径下,可能导致平台无法找到模型。
如有其他问题,请查阅RflySim平台官方文档或寻求技术支持
【飞思实验室】专注于为各高校、军工院所及应用单位,在无人装备的飞行控制、集群协同、智能感知及博弈对抗等方向提供一套完善的涵盖建模、设计、仿真、实装在内的教学、科研及实训解决方案,大大丰富教学及实训过程、加速科研成果落地,核心代码均自主可控。
















 708
708











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









