






西门子1200立库机器人码垛机伺服视觉AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序
PLC与工业相机视觉定位及机器人使用Modbus TCP通讯
PLC和码垛机Modbus TCP通讯(SCL语言)
PLC和4台G120变频使用Profinet通讯
1个伺服轴,AGV
SCL语言和梯形图混编,学习实用性广,知识点丰富,有注释
ID:512693055804233
CODESYS工业自动化
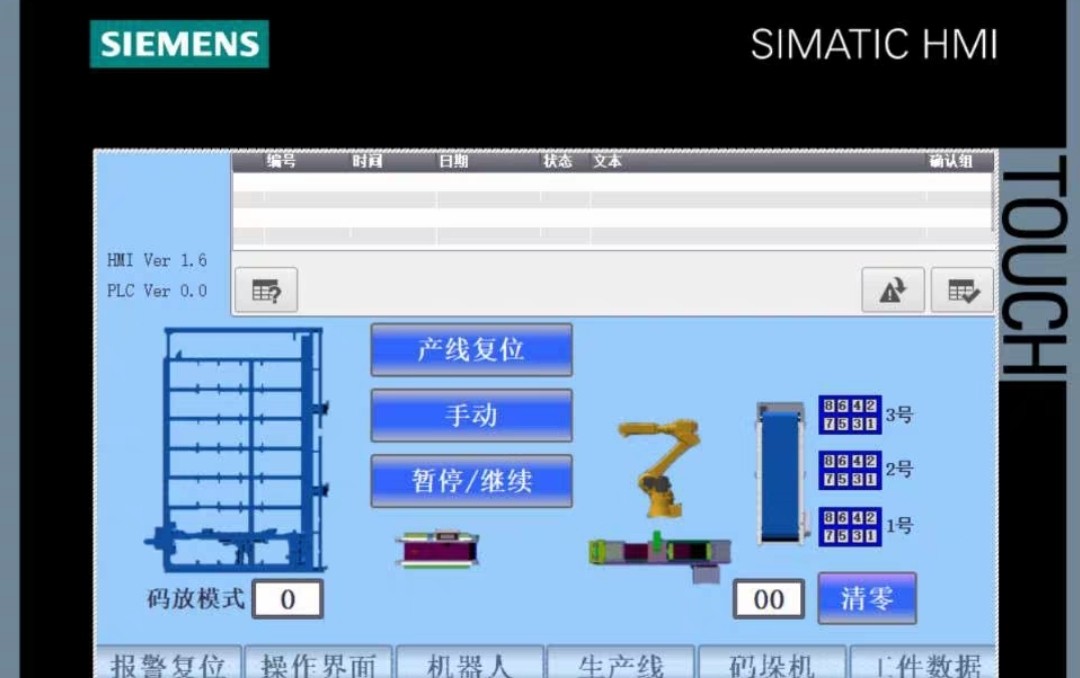
西门子1200立库机器人码垛机伺服视觉AGV程序
PLC与工业相机视觉定位及机器人使用Modbus TCP通讯
PLC和码垛机Modbus TCP通讯(SCL语言)
PLC和4台G120变频使用Profinet通讯
1个伺服轴,AGV
SCL语言和梯形图混编,学习实用性广,知识点丰富,有注释
技术资料售出不退换
随着工业自动化技术的不断发展,机器人在生产线上的应用越来越广泛。特别是在仓储和物流行业中,机器人码垛技术的应用已经成为提高生产效率和降低人力成本的重要手段之一。本文将针对西门子1200立库机器人码垛机的程序,以及相关的PLC控制和通讯技术展开分析。
首先,本文将重点介绍西门子1200立库机器人的码垛程序。该程序涉及2台西门子PLC1215程序和2台西门子触摸屏TP700程序。通过搭载在机器人上的视觉设备,如工业相机,可以实现对货物的定位和识别。利用PLC控制器和SCL语言编程,可以实现对机器人的精准控制和路径规划,从而实现高效的码垛操作。在编写程序时,注释的使用可以提高程序的可读性和维护性,使得程序更易于理解和修改。
其次,本文将介绍PLC与工业相机视觉定位及机器人使用Modbus TCP通讯的技术。工业相机的应用可以实现对物体的图像采集和处理,通过图像处理算法,可以实现对物体的定位和识别,为后续的码垛操作提供准确的数据支持。同时,PLC与工业相机之间的通讯是实现整个系统协调工作的关键。通过使用Modbus TCP通讯协议,PLC和工业相机可以实现实时的数据交换和控制命令传输,从而实现对机器人的精确控制和码垛操作的优化。
进一步地,本文将探讨PLC和码垛机Modbus TCP通讯的具体实现。在码垛系统中,PLC充当着控制中心的角色,而码垛机则是执行具体操作的设备。通过使用SCL语言编程,可以实现PLC与码垛机之间的数据交换和命令传输。Modbus TCP通讯协议的使用,可以实现远程通讯和控制,提高系统的灵活性和可靠性。通过融合SCL语言和梯形图的编程方式,可以充分发挥两种编程方式的优势,实现程序的高效和稳定运行。
另外,本文还将介绍PLC和4台G120变频使用Profinet通讯的技术。在码垛系统中,变频器的使用可以实现对机器人的速度和位置的控制。通过使用Profinet通讯协议,PLC和变频器之间可以实现实时的数据交换和命令传输,从而实现对机器人的精确控制和码垛操作的优化。
最后,本文还将介绍伺服轴和AGV的应用。伺服轴的使用可以实现对机器人的精确定位和轨迹控制,提高码垛操作的准确性和效率。同时,AGV的应用可以实现机器人的自主导航和路径规划,提高码垛操作的自动化程度和生产效率。
综上所述,本文围绕西门子1200立库机器人码垛机的程序及相关技术展开分析,重点介绍了PLC控制和通讯技术在码垛系统中的应用。通过深入的技术分析和实用性的示例,为读者提供了一个全面了解和学习相关技术的机会。希望本文能够对读者在码垛技术和工业自动化领域的学习和应用有所帮助。
【相关代码 程序地址】: http://nodep.cn/693055804233.html















 679
679

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









