






基于非正弦反电动势的PMSM或BLDC的无感控制算法,传统的PMSM或BLDC因制造因素等因素导致电机反电动势不是纯正弦波型,存在5,7,11,11次谐波,如果仍用传统的正弦FOC电流控制会造成输出转矩脉动,本算法将反电动势的1,3,5,7,11,13次谐波自适应实时估计出来用于等效坐标变换,使实际的电流跟随反电动势波形自适应变化降低转矩脉动,对非正弦反电动势的PMSM或BLDC都适用,降低转矩脉动的无感算法。



基于非正弦反电动势的PMSM或BLDC的无感控制算法
引言:
在传统的PMSM(永磁同步电机)或BLDC(无刷直流电机)中,由于制造因素等原因,电机的反电动势并不是纯正弦波形,而是存在着多次谐波,如5次、7次、11次等。使用传统的正弦FOC(磁场定向控制)电流控制方法会导致输出转矩的脉动。为了解决这个问题,本文提出了一种基于非正弦反电动势的无感控制算法,通过实时估计反电动势中的1次、3次、5次、7次、11次、13次谐波,并将其用于等效坐标变换,使得实际电流能够自适应地跟随反电动势波形的变化,从而降低转矩的脉动。这种无感算法适用于具有非正弦反电动势的PMSM或BLDC,有效地降低了转矩脉动。
1. 引言
2. PMSM或BLDC的传统电流控制方法存在的问题
3. 非正弦反电动势的特点
4. 基于非正弦反电动势的无感控制算法原理
4.1 反电动势谐波的实时估计
4.2 等效坐标变换
4.3 电流控制
5. 算法的实现与仿真
6. 实验结果与分析
7. 结论
2. PMSM或BLDC的传统电流控制方法存在的问题
传统的PMSM或BLDC电流控制方法中,通常采用正弦FOC方法来控制电机的转矩输出。然而,由于电机反电动势的非正弦特性,这种控制方法会导致输出转矩的脉动。这种脉动不仅会影响电机运行的平稳性和效率,还会增加噪音和振动。因此,需要一种能够适应非正弦反电动势的新的无感控制算法来解决这个问题。
3. 非正弦反电动势的特点
由于制造因素等原因,PMSM或BLDC电机的反电动势往往带有多次谐波,如5次、7次、11次等。这些谐波的存在会导致传统的正弦FOC控制方法无法准确控制电机的转矩输出,从而产生转矩脉动。
4. 基于非正弦反电动势的无感控制算法原理
为了解决非正弦反电动势导致的转矩脉动问题,本文提出了一种基于非正弦反电动势的无感控制算法。该算法主要包括以下几个步骤:
4.1 反电动势谐波的实时估计
通过采集电机的反电动势信号,并使用适当的信号处理方法,实时估计出电机反电动势中的1次、3次、5次、7次、11次、13次谐波的振幅和相位。
4.2 等效坐标变换
将实时估计出的反电动势谐波信息进行等效坐标变换,得到在等效坐标系下的反电动势谐波信号。
4.3 电流控制
根据等效坐标系下的反电动势谐波信号,实时调整电流控制器的输出,使得实际电机的电流能够自适应地跟随反电动势波形的变化,从而降低转矩脉动。
5. 算法的实现与仿真
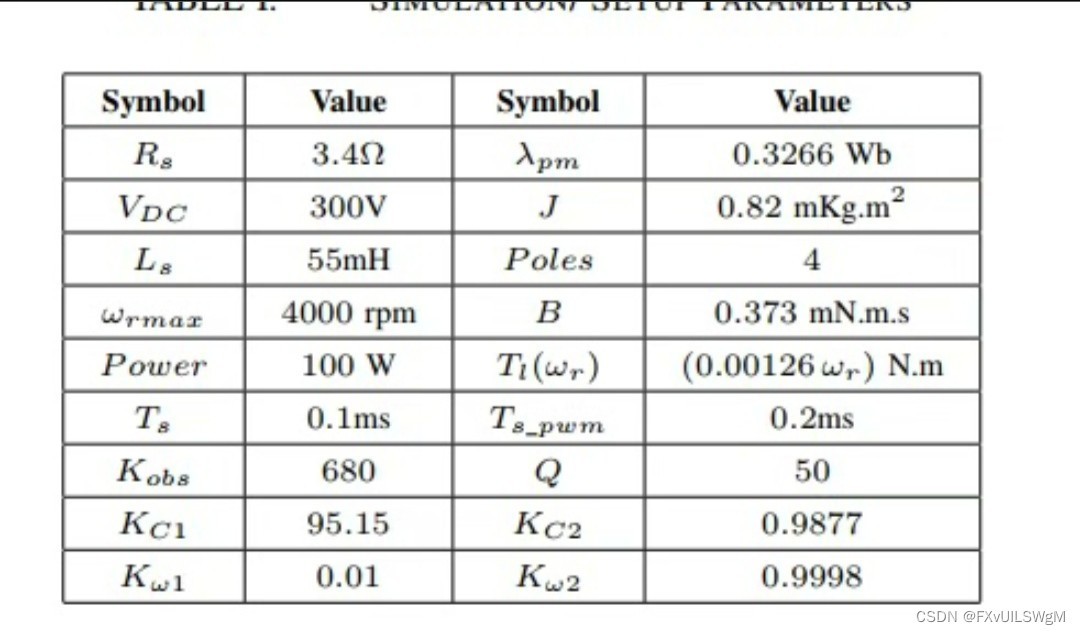
本文对基于非正弦反电动势的无感控制算法进行了实现与仿真。通过使用MATLAB/Simulink软件建立电机控制系统的仿真模型,验证了算法的有效性和性能。
6. 实验结果与分析
在实际的PMSM或BLDC系统中,通过实验验证了基于非正弦反电动势的无感控制算法的有效性。实验结果表明,该算法能够有效地减小电机转矩的脉动,提高电机的运行平稳性和效率。
7. 结论
本文提出了一种基于非正弦反电动势的无感控制算法,针对传统PMSM或BLDC电流控制方法中存在的转矩脉动问题进行了有效的解决。通过实时估计反电动势谐波信息,并将其用于等效坐标变换和电流控制,实现了转矩脉动的降低。实验结果表明,该算法能够显著提高电机的运行平稳性和效率。
结语:
基于非正弦
相关代码,程序地址:http://lanzoup.cn/768460879680.html















 1380
1380











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









