









前言
磁场定向控制又称矢量控制(FOC), 本质上为控制定子电流的幅度和相位,使之产生的磁场和转子的磁场正交,以产生最大的扭矩. PMSM的磁场定向控制框图如下图所示:

第19、20讲分别实现了基于NUCLEO-F103RB和X-NUCLEO-IHM07M1 3SH及MotorControl Workbench的单电阻FOC有感(hall)算法及单电阻FOC无感并都让电机运转起来。本节将重点对比一下这两种算法在代码实现上的具体差别。
本节将用到Beyond Compare文件对比分析工具,对第19、20讲的代码进行差异分析。用文件夹比对方式将第19、20讲的代码加载到Beyond Compare:
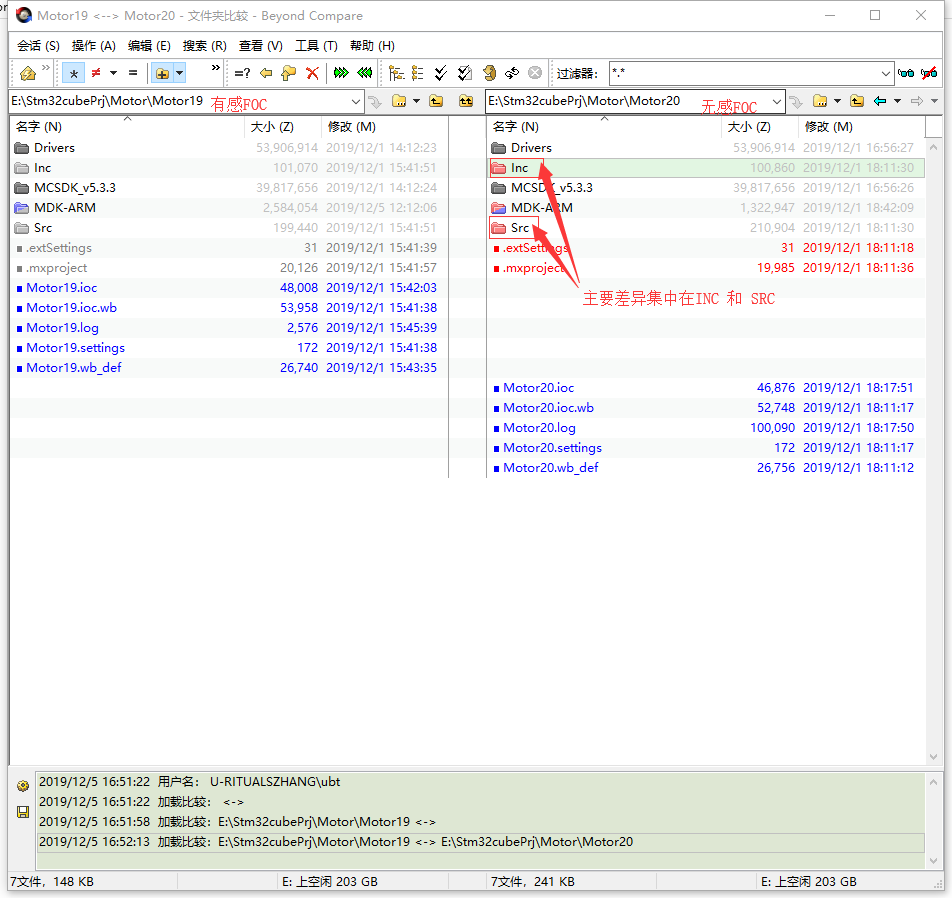
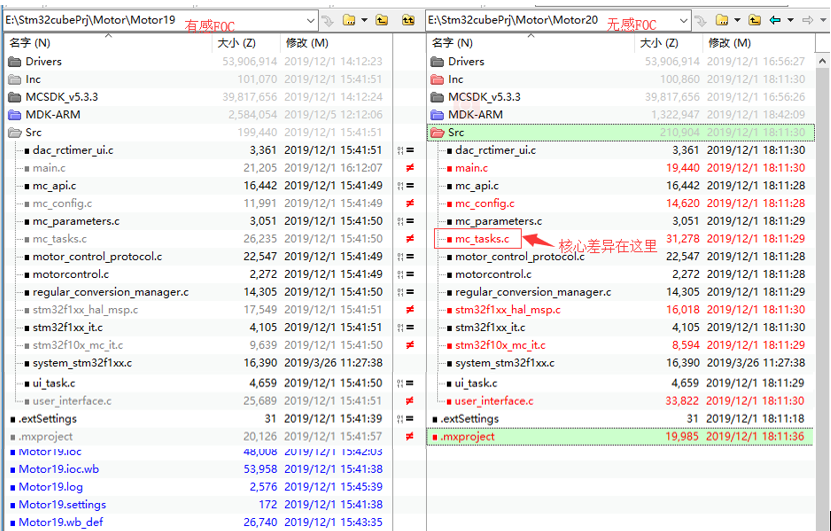
从上面的两个对比结果图可以看到,有感FOC算法与无感FOC算法在代码上差异区主要集中在INC和SRC两个文件夹中,其中inc文件夹中的主要不同集中在drive_parameters.h、main.h、mc_config.h、parameters_conversion.h、pmsm_motor_parameters.h五个文件;Src文件夹中的主要不同集中在main.c、mc_config.c、mc_tasks.c、stm32f1xx_hal_msp.c、stm32f10x_mc_it.c、user_interface.c六个文件中: 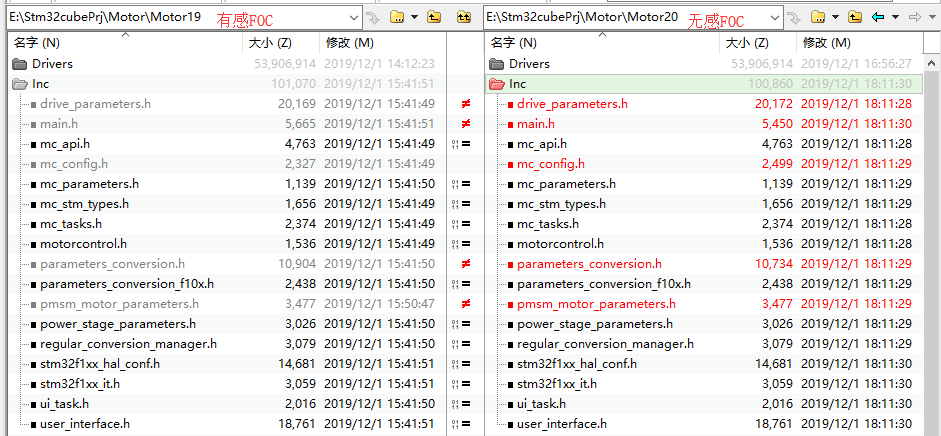
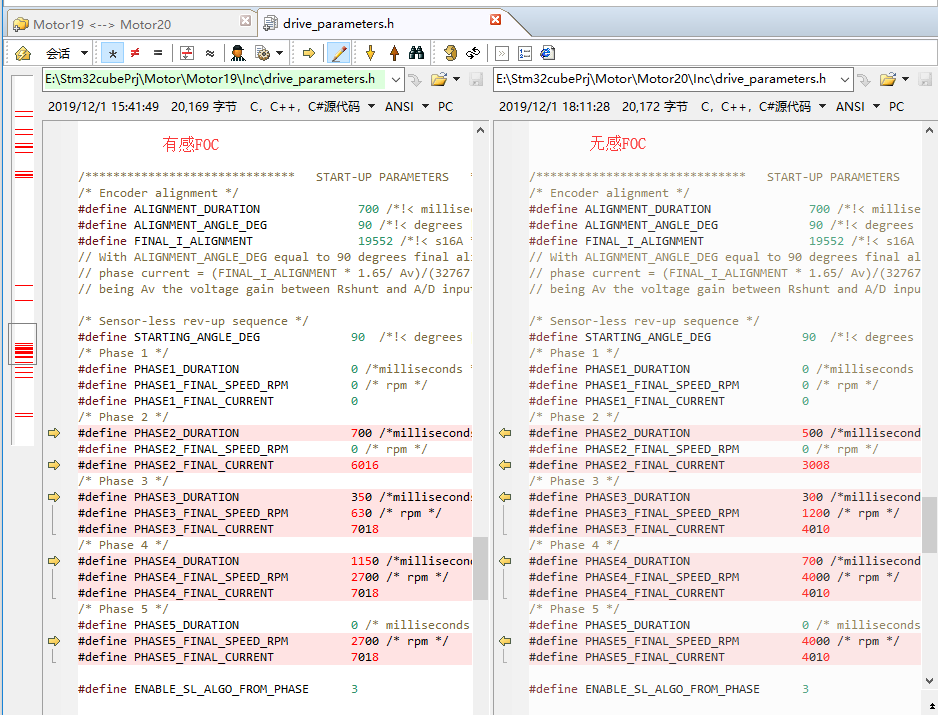
drive_parameters.h中主要是工程配置时有些差数配置不一样:
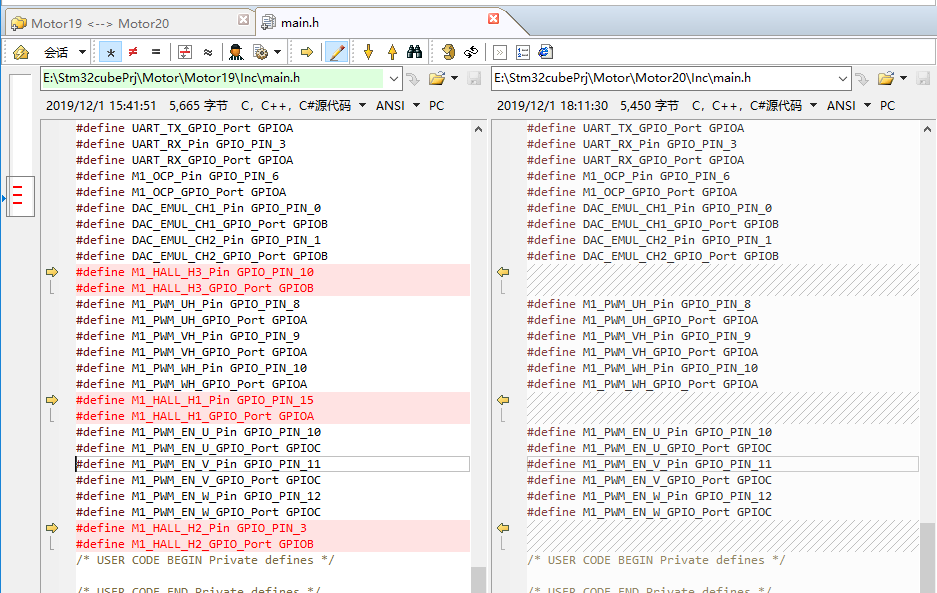
main.h中差异主要体现在无感foc(右侧)算法没有对HALL传感器引脚的定义:
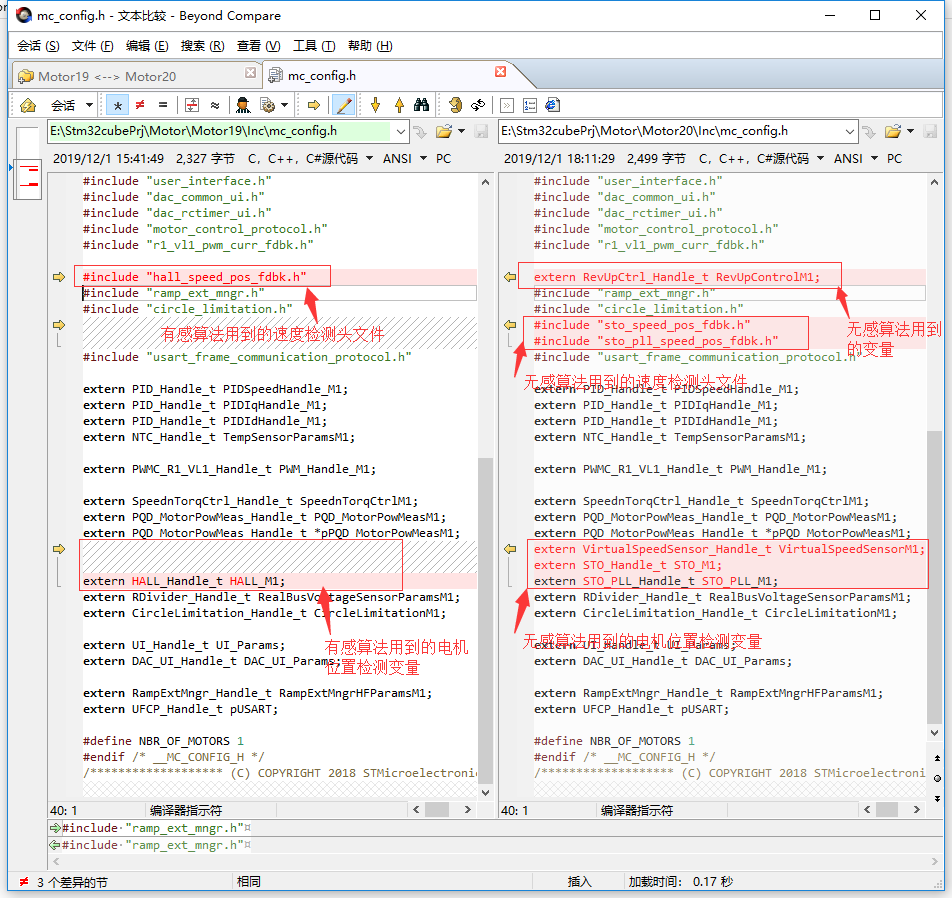
mc_config.h的差异:
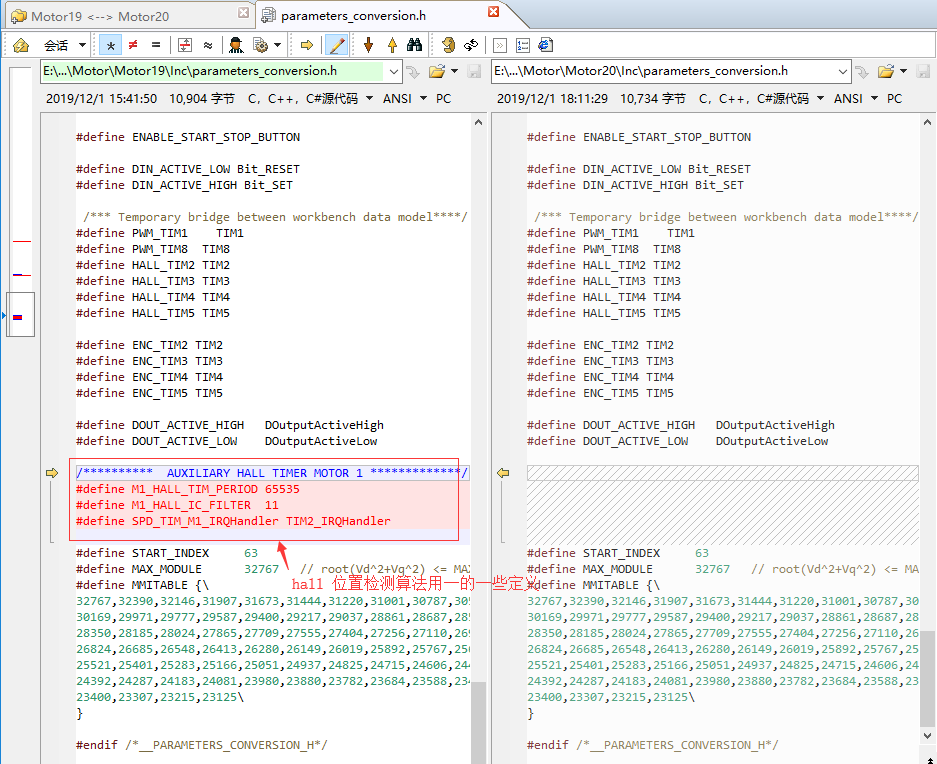
parameters_conversion.h的差异主要在:

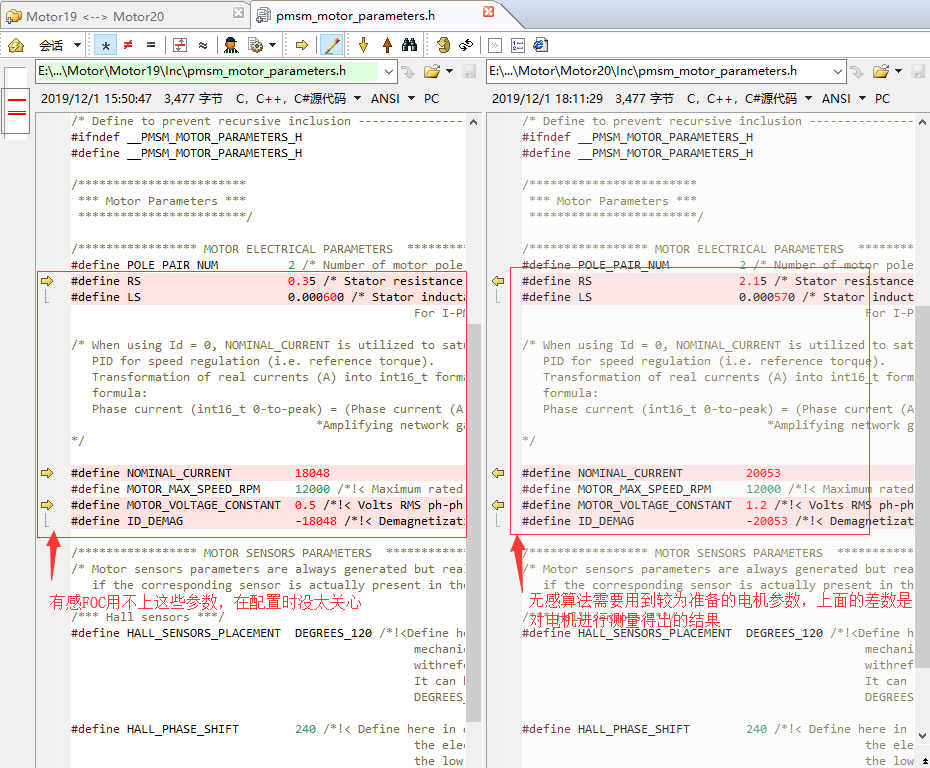
pmsm_motor_parameters.h差异主要体现在电机配置时对电机参数提输入不同:
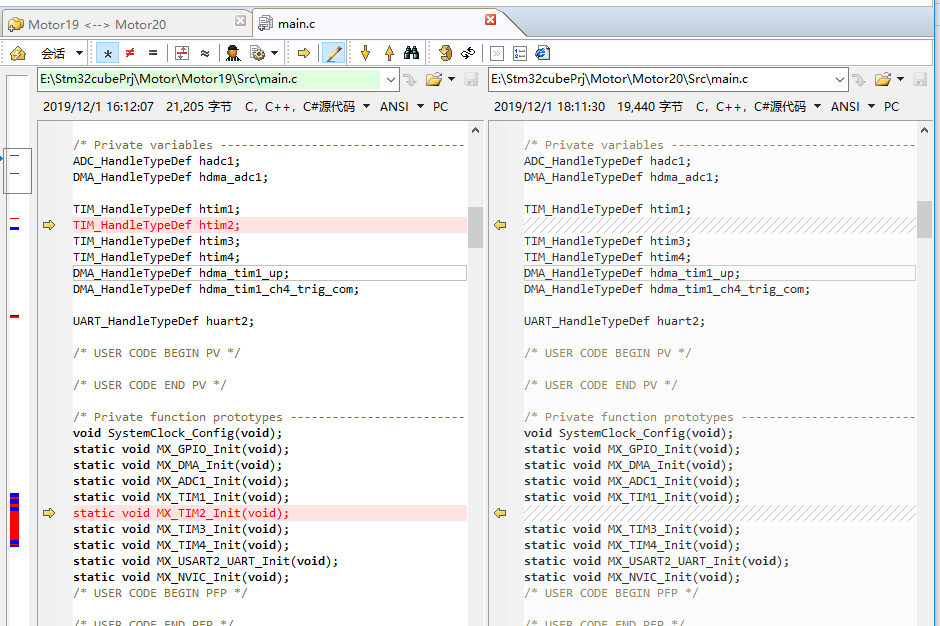
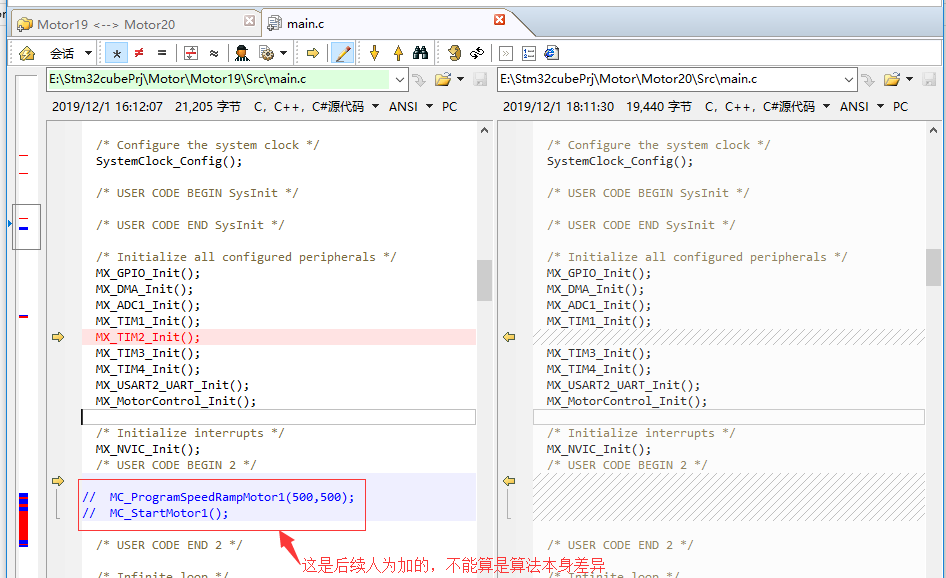
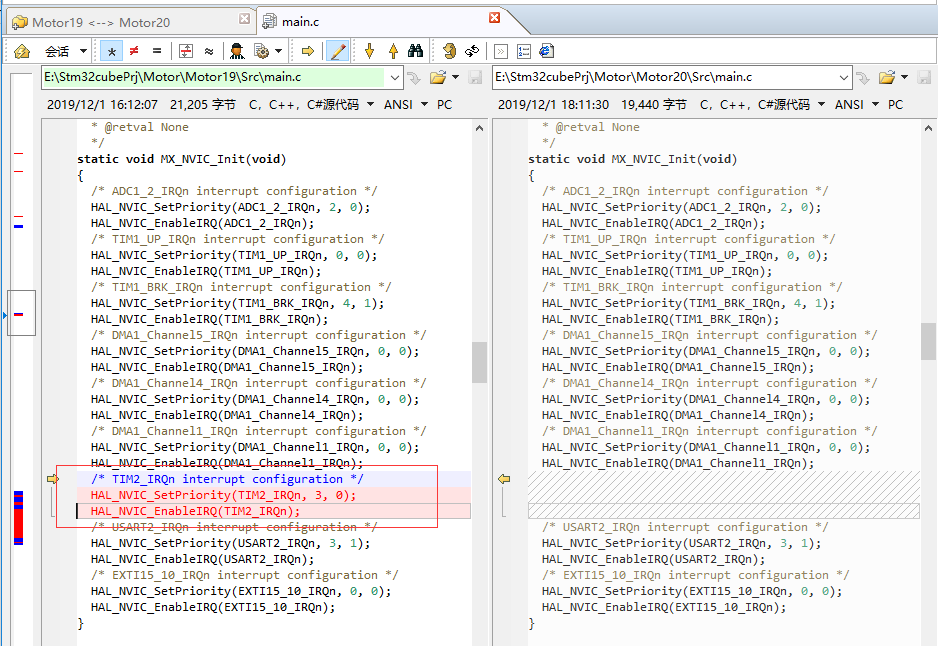
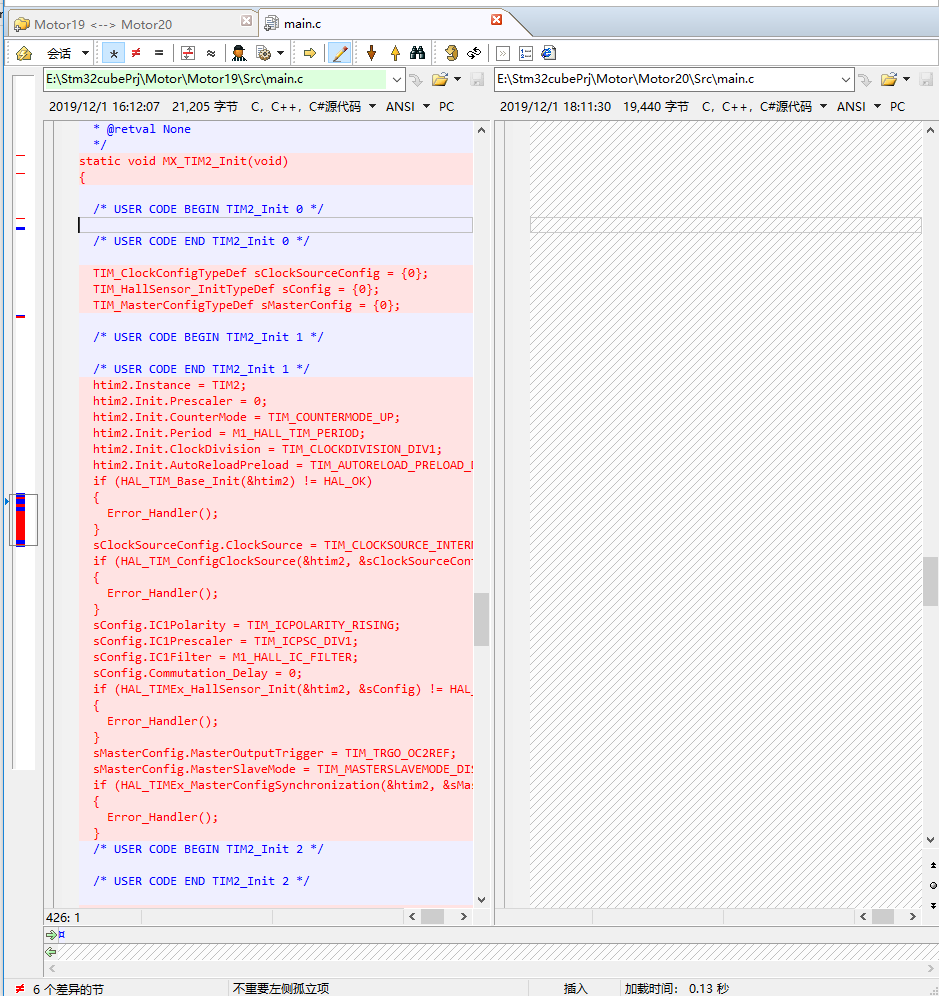
main.c中的差异主要体现在使用有感(HALL)的FOC算法多了一些硬件定时器的定义初始化配置等函数实现:
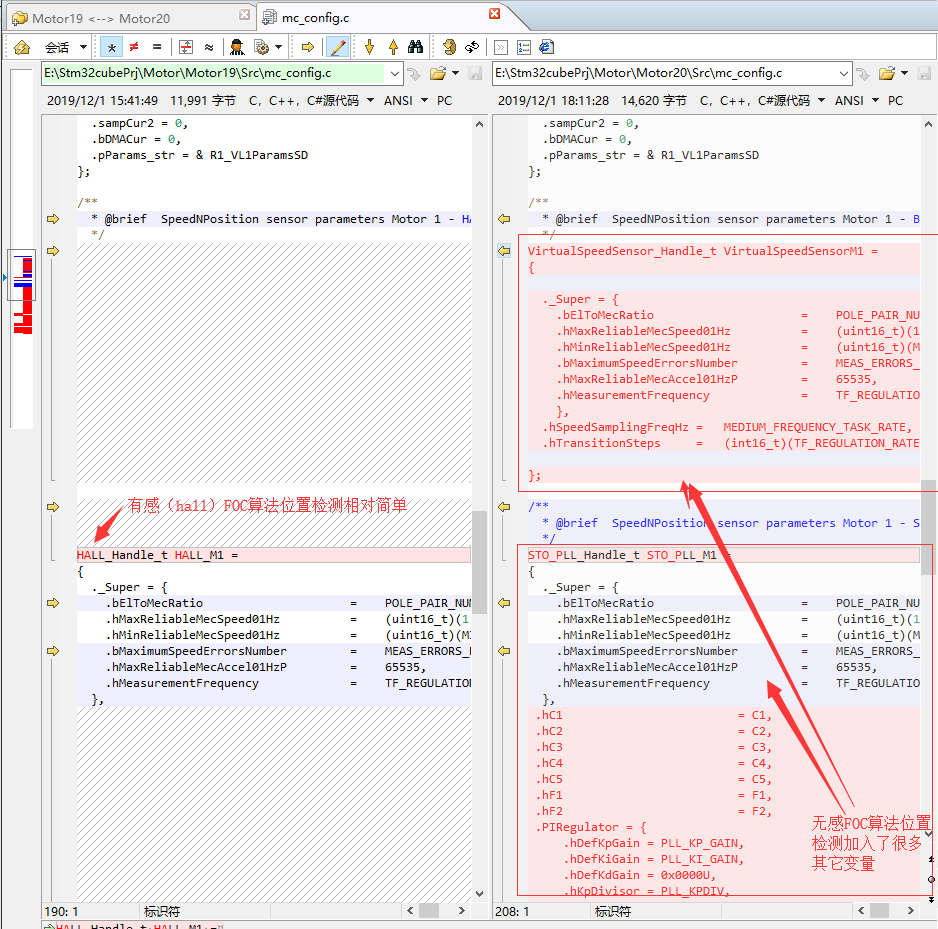
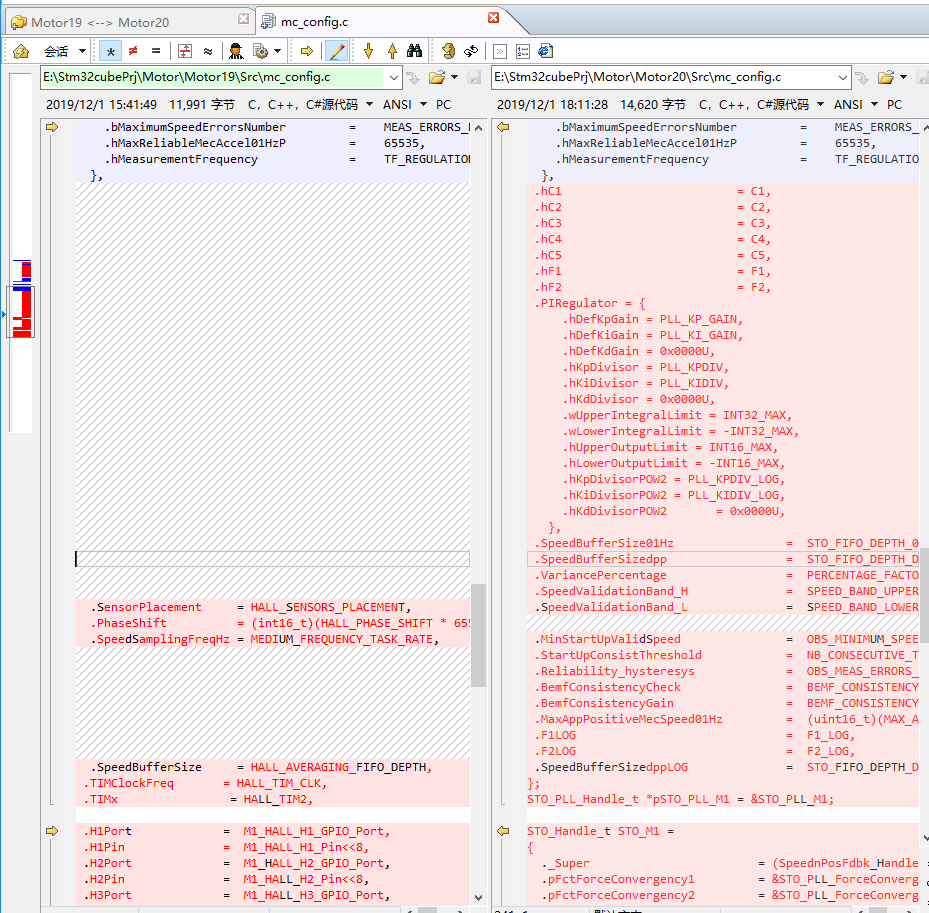
mc_config.c文件中的差异更能体现去有感FOC算法与无感FOC算法之间的差异:
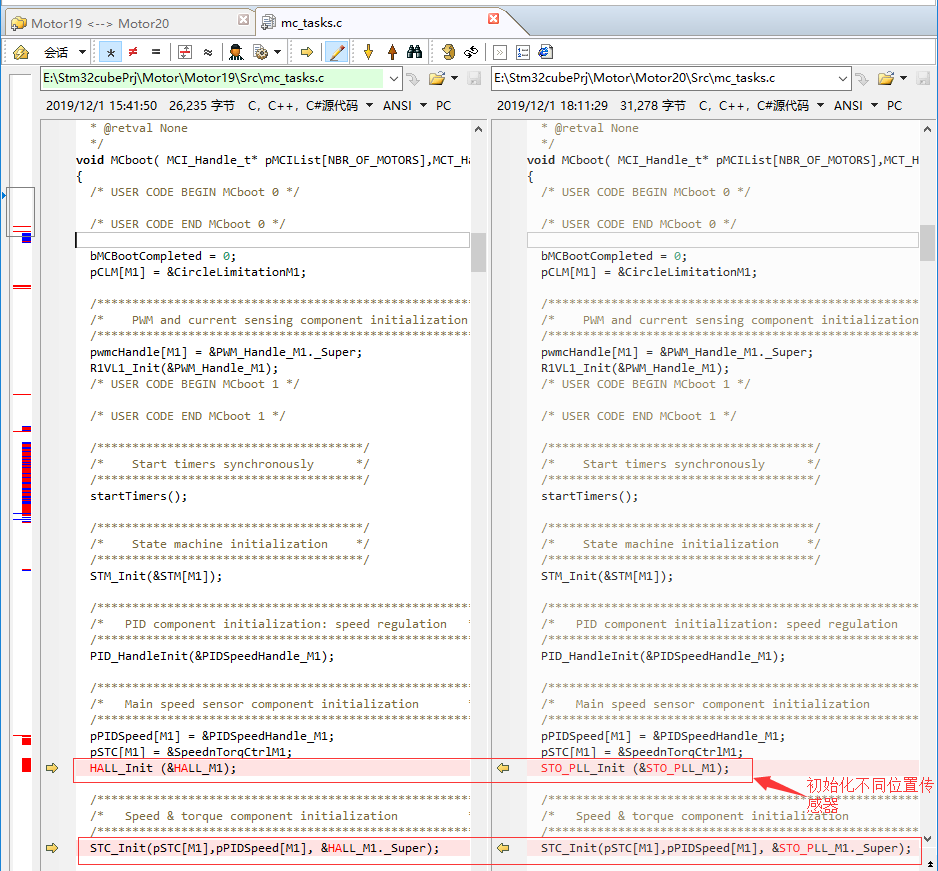
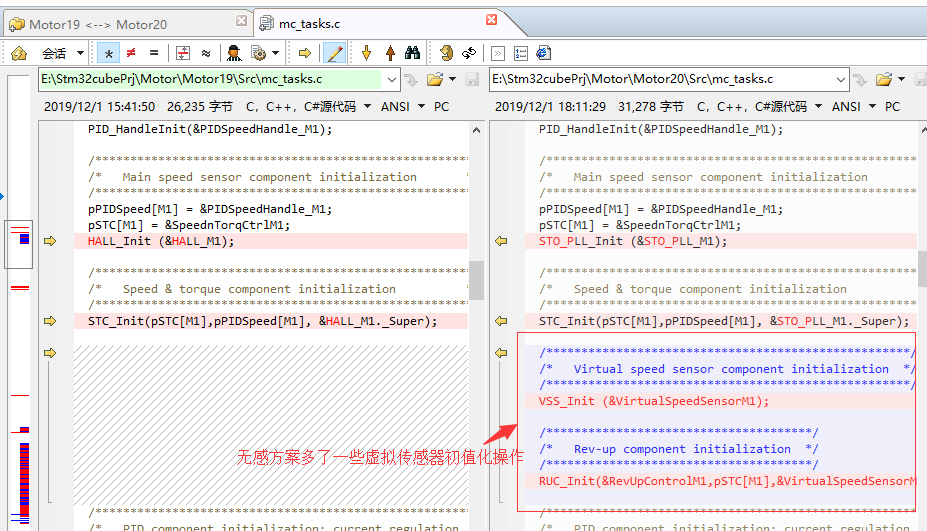
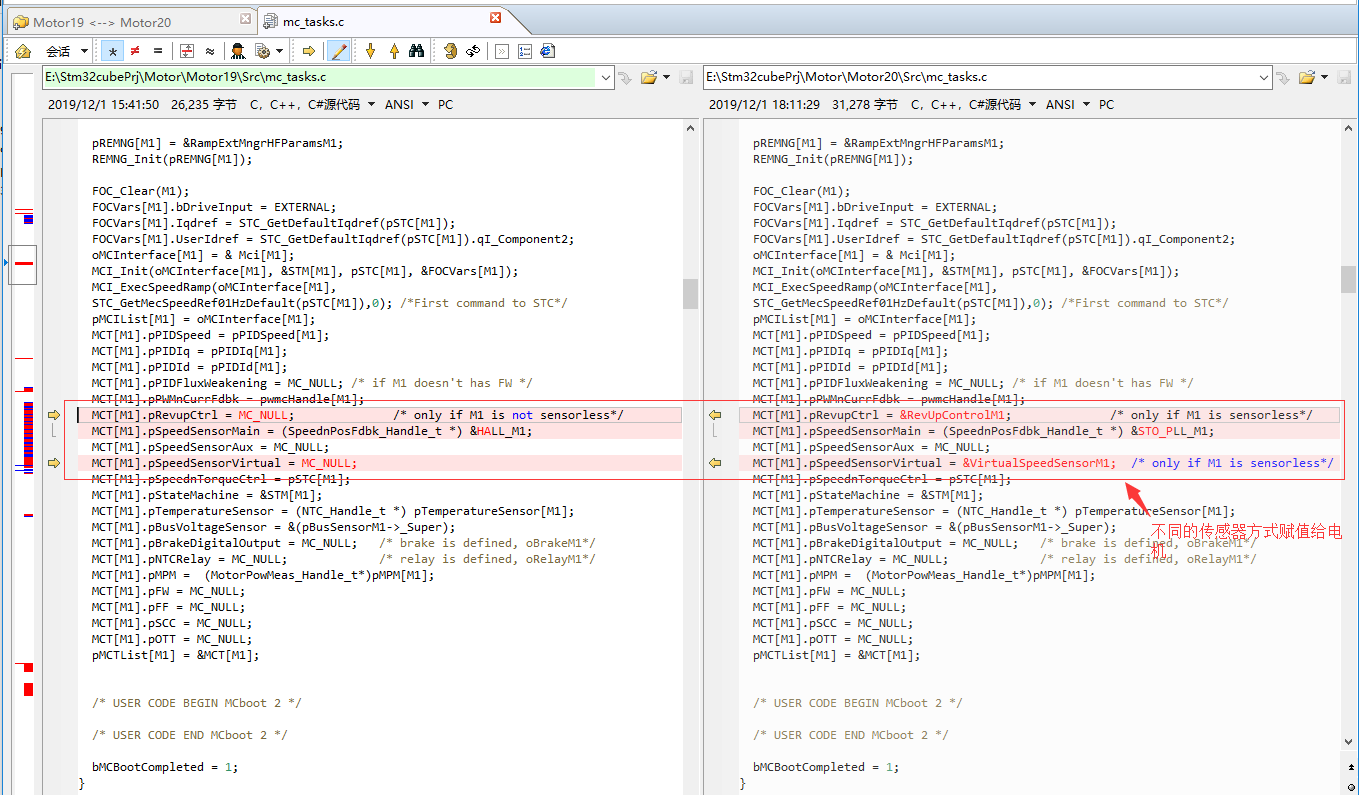
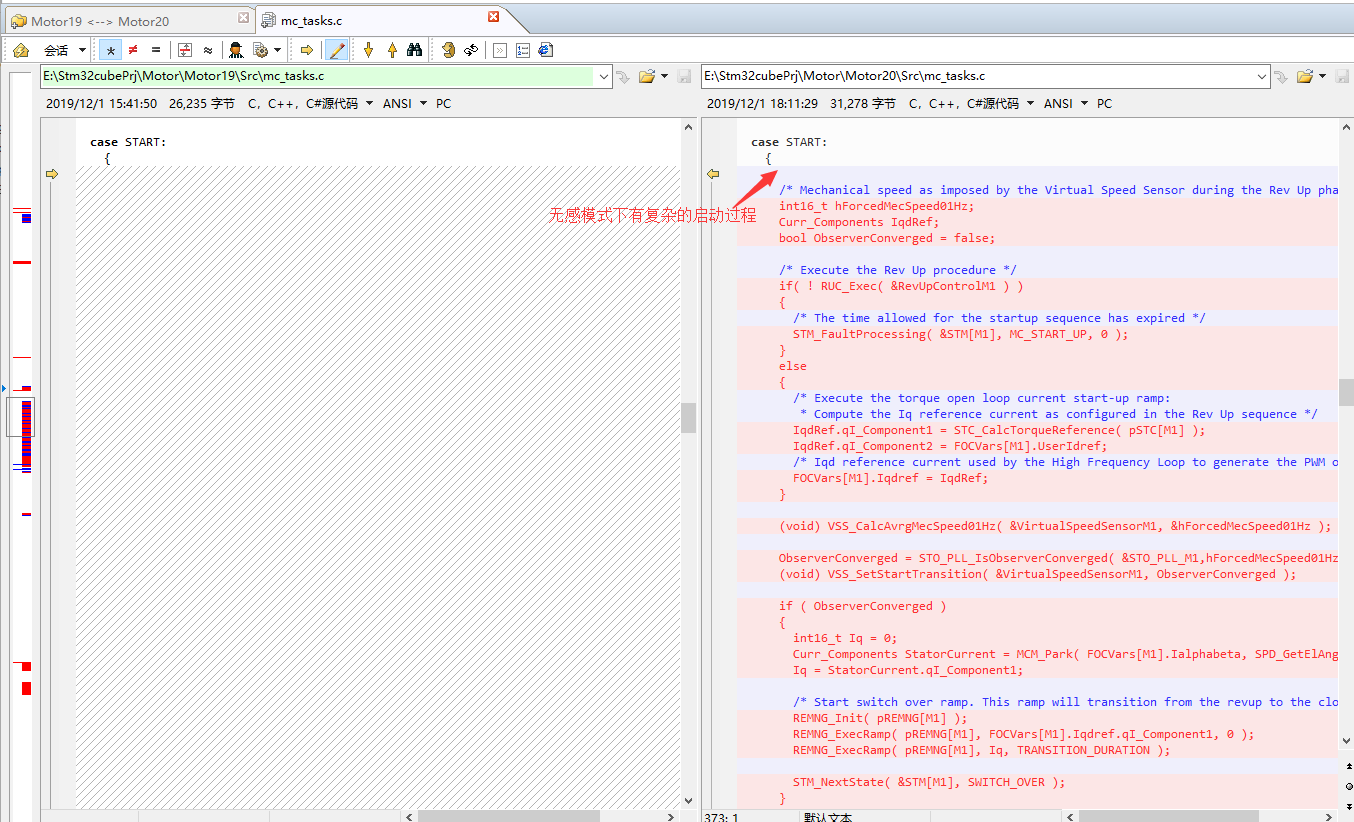
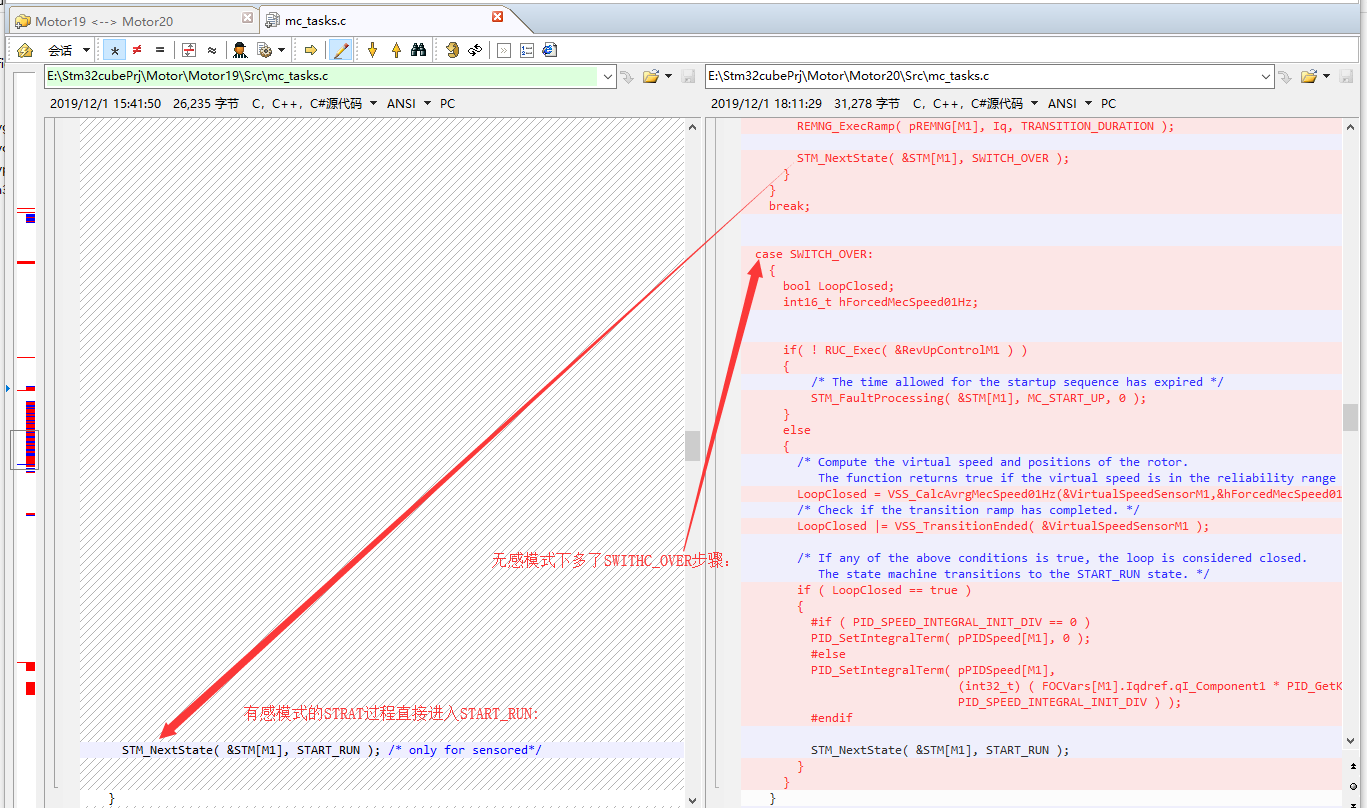
mc_tasks.c两种算法的真正核心差异集中体现在mc_tasks.c,清楚该文件间差异及其用用,通过修该文件,可以将无感FOC变换成有感(如绝对式磁编码器,hall ,hall+增量编码器),首先是在MCboot函数中:
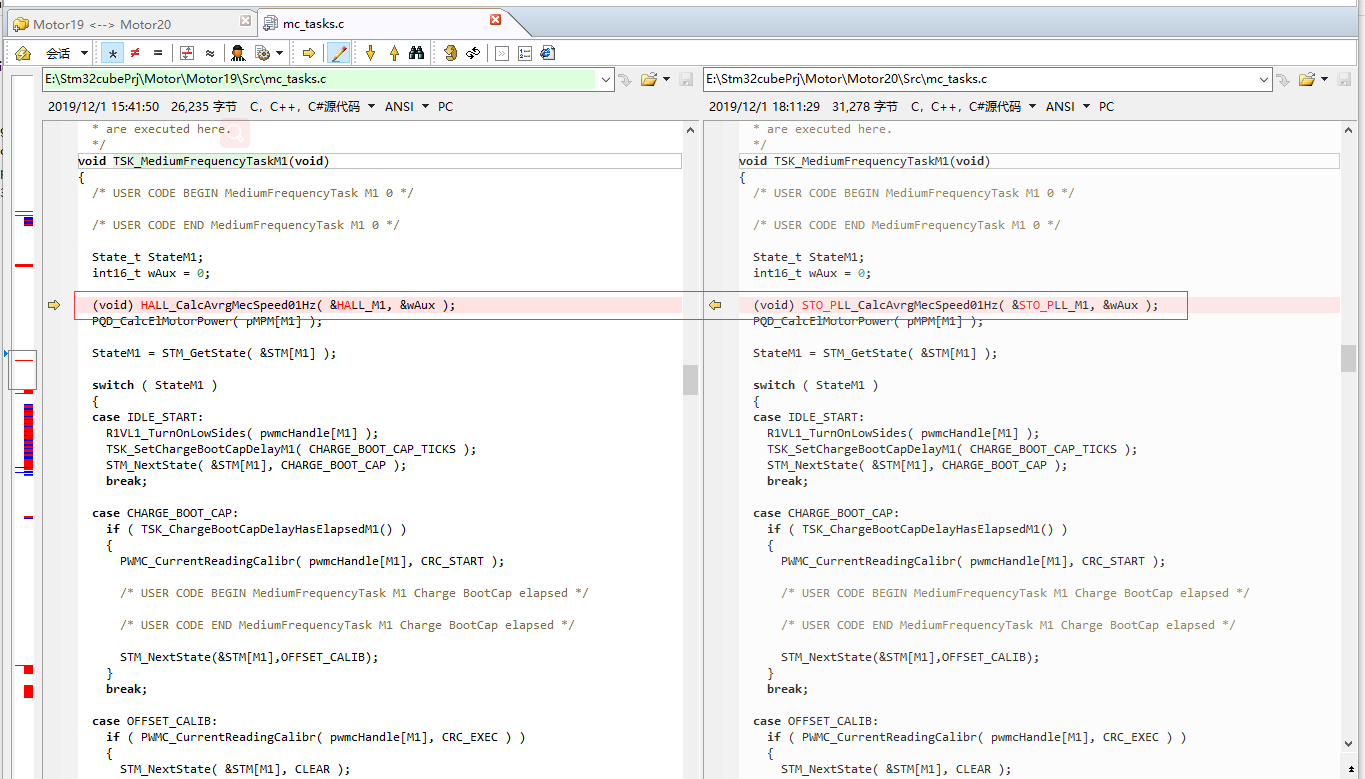
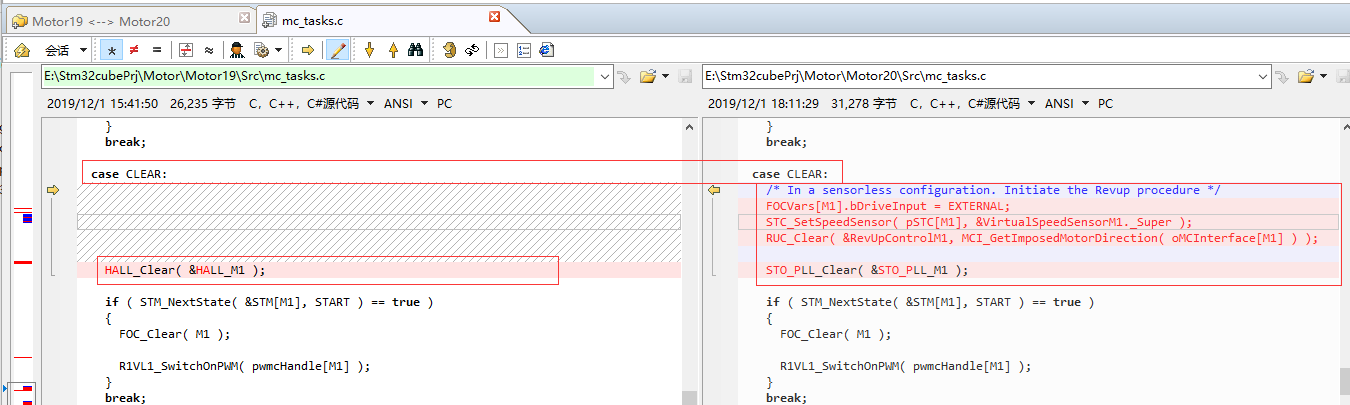
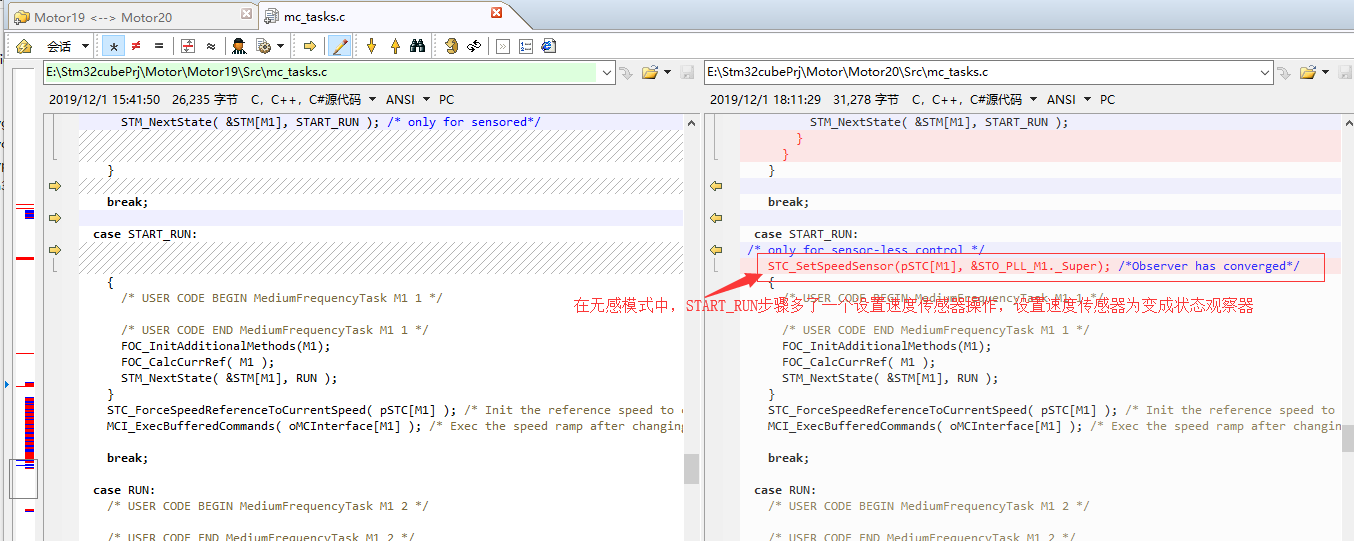
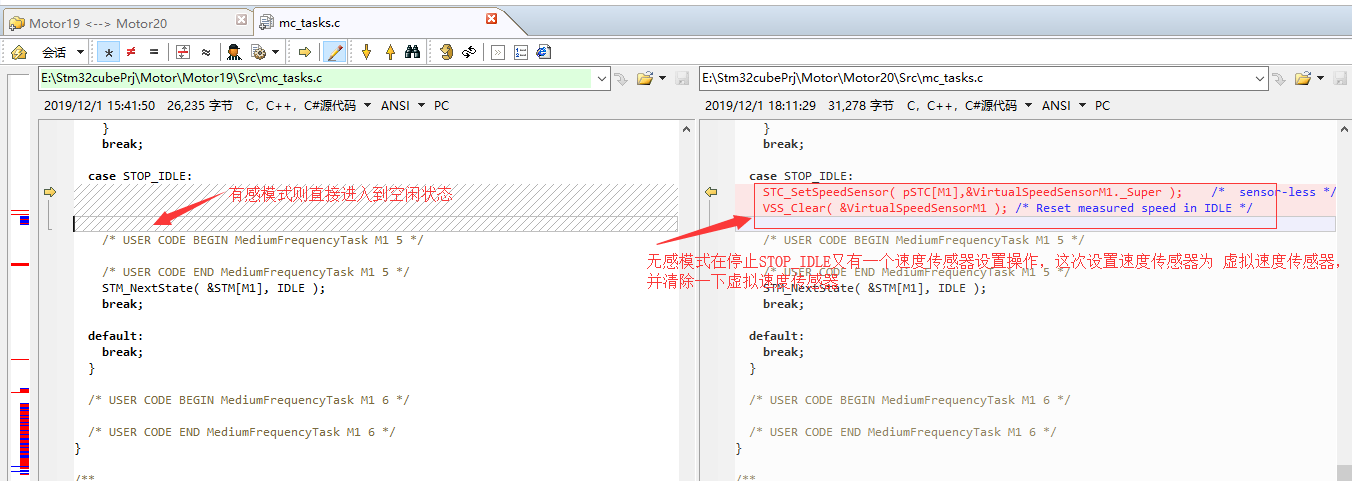
在TSK_MediumFrequencyTaskM1中频任务中调用不同的速度计算函数,和不同的状态中具体操作也有点差别:
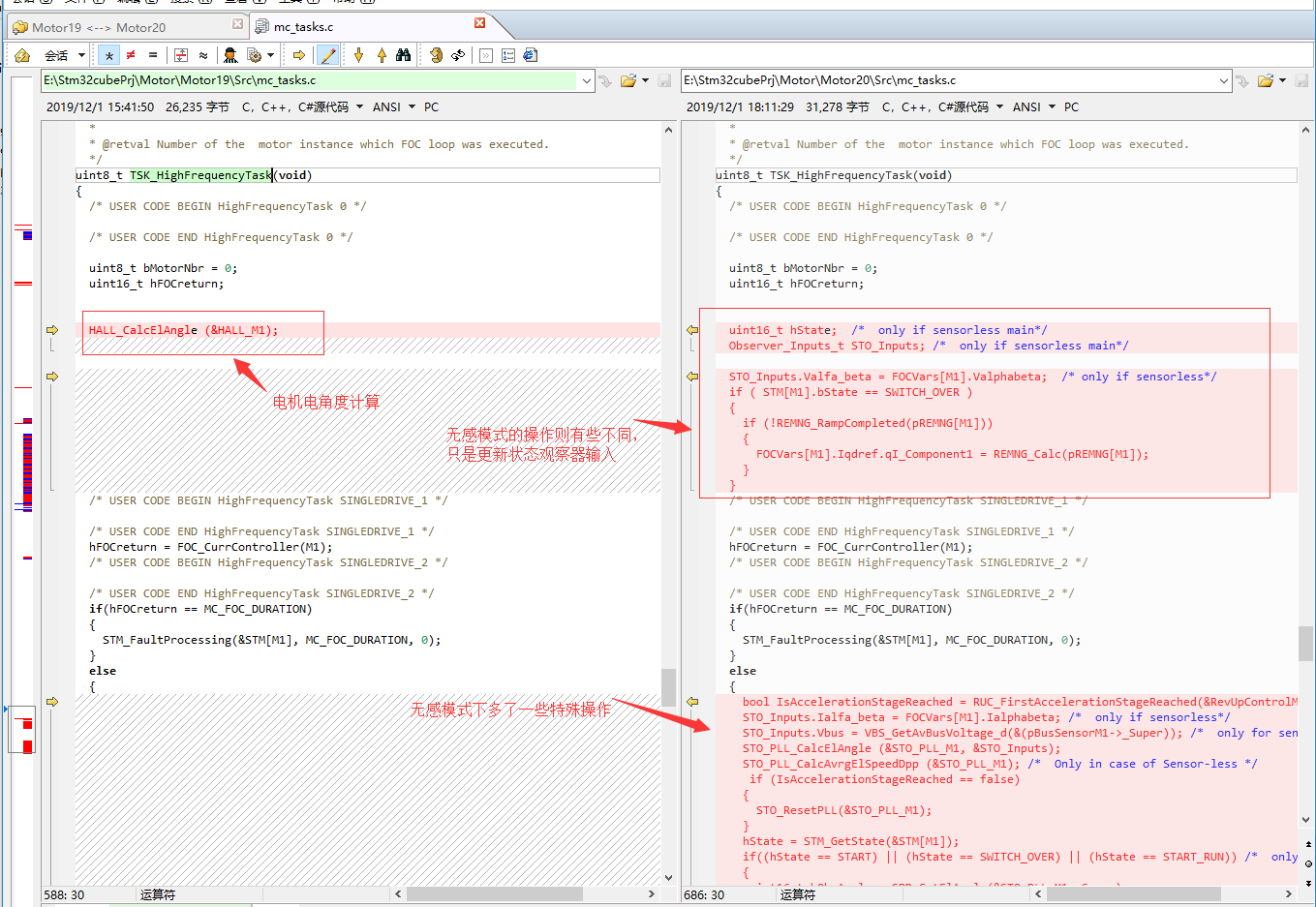
在TSK_HighFrequencyTask高频任务中也有一些差异:
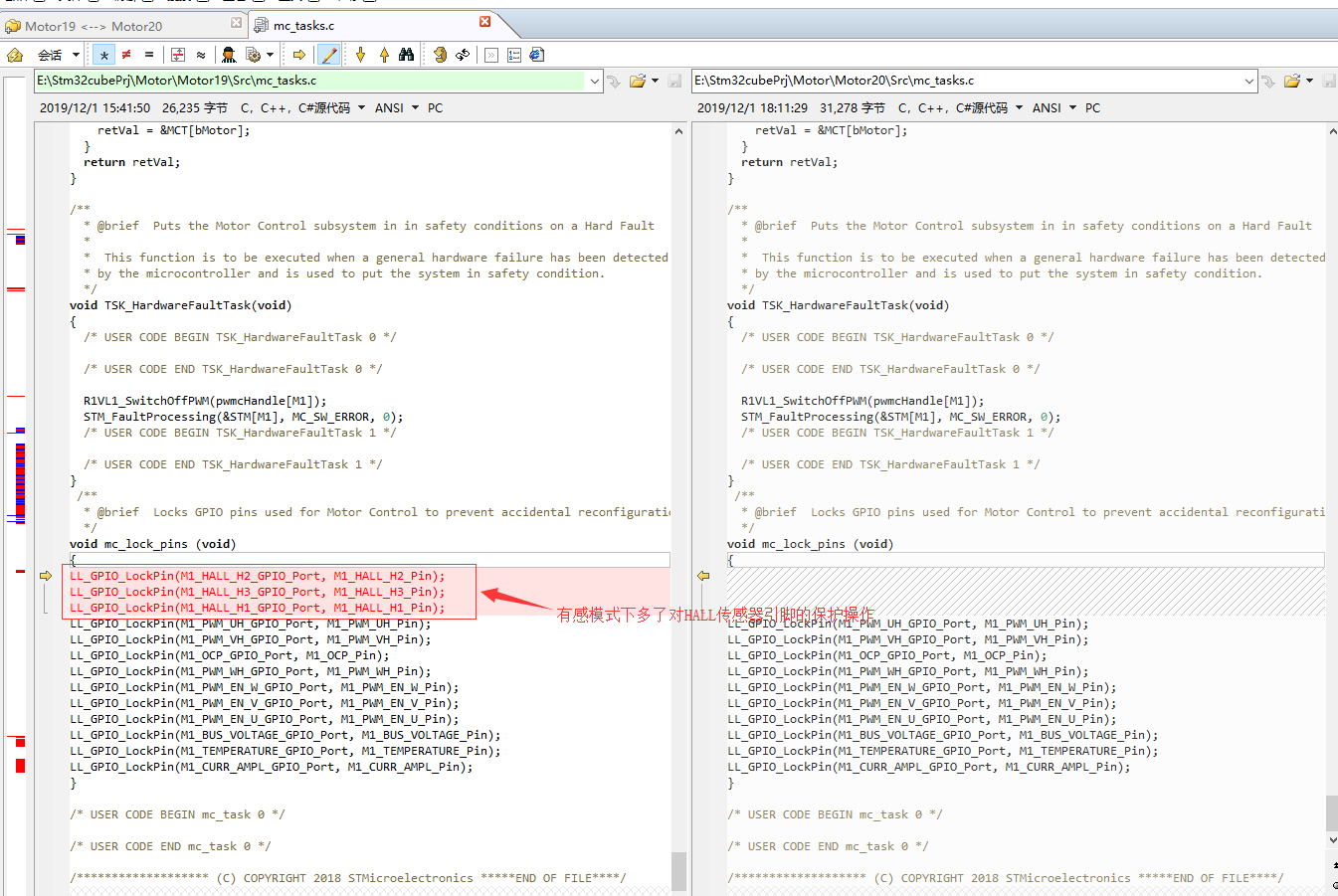
最后在mc_lock_pins函数中有感FOC算法多了对HALL传感器引脚的保护操作:
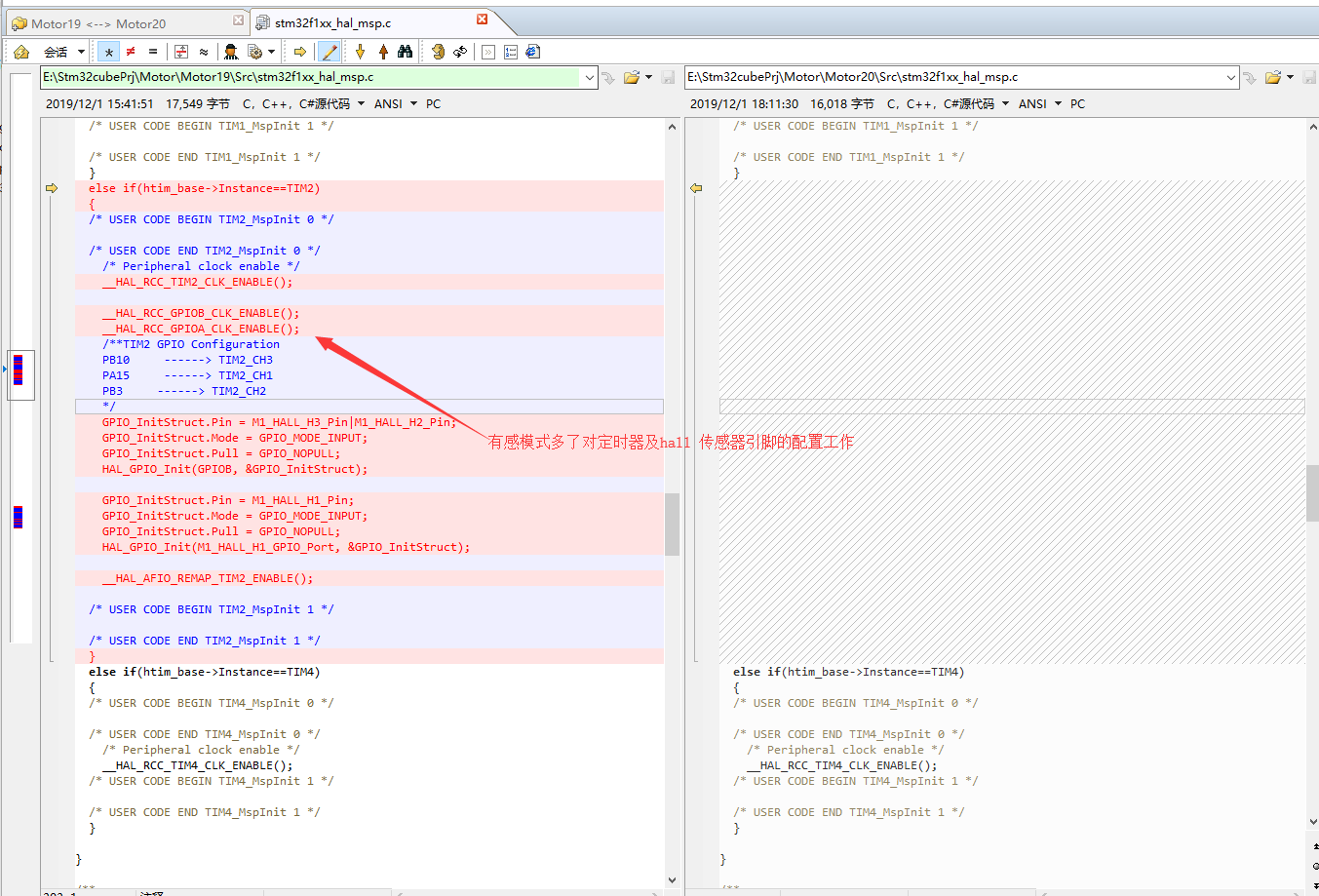
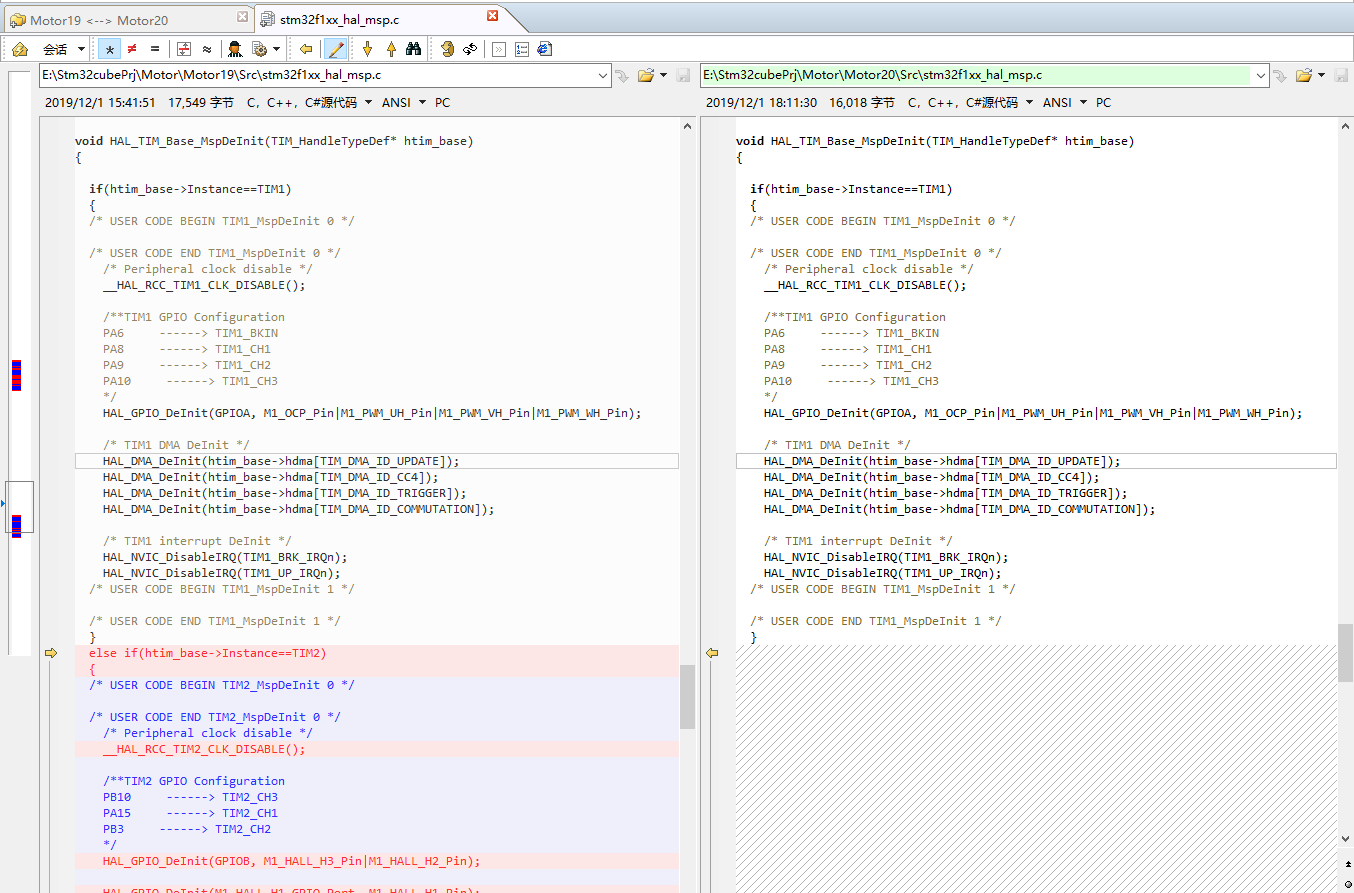
stm32f1xx_hal_msp.c中有感FOC模式下多了对定时器及HALL传感器引脚的配置工作:
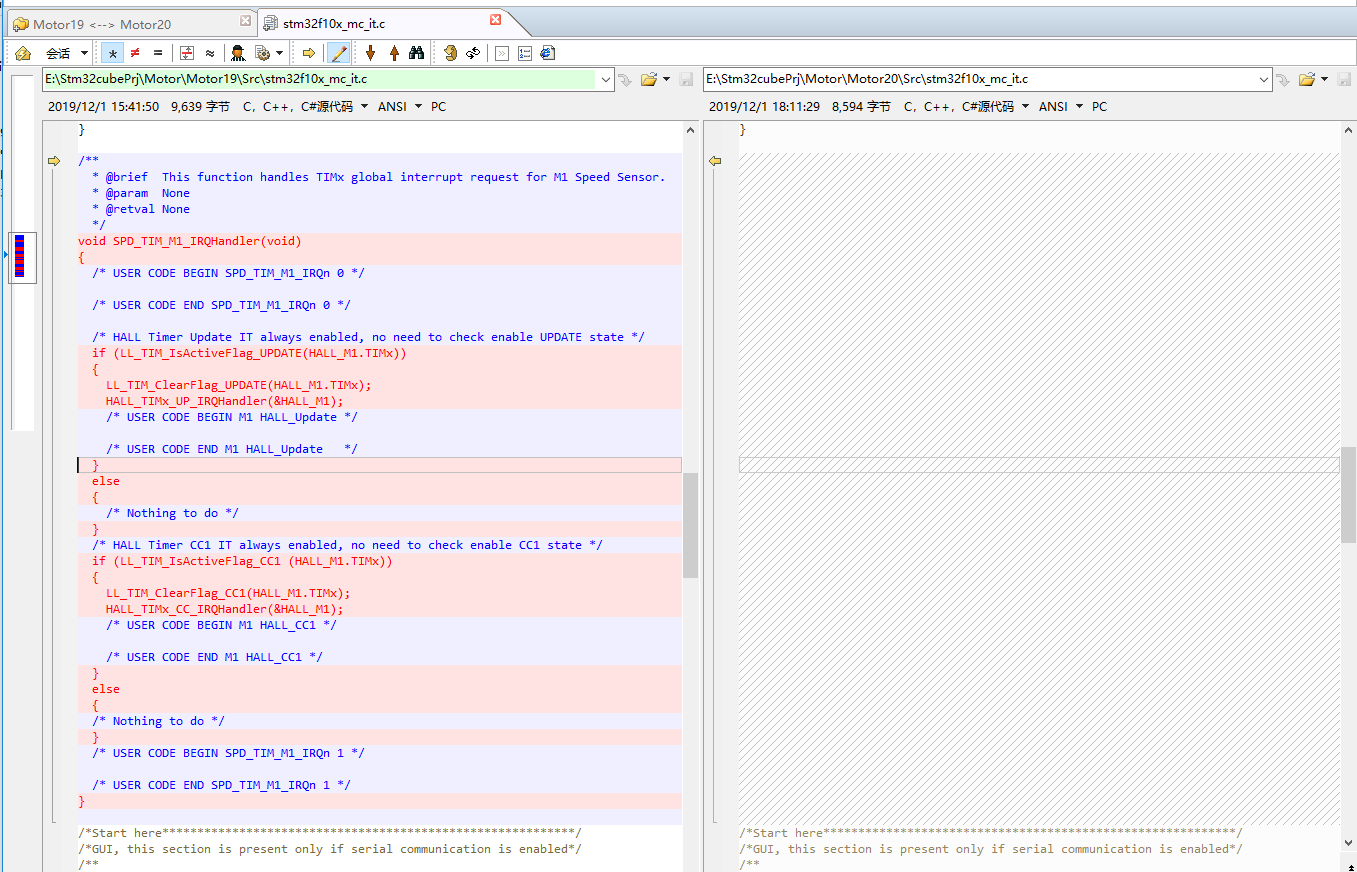
stm32f10x_mc_it.c中,有感FOC算法中多了SPD_TIM_M1_IRQHandler(定时器2)中断响应函数:
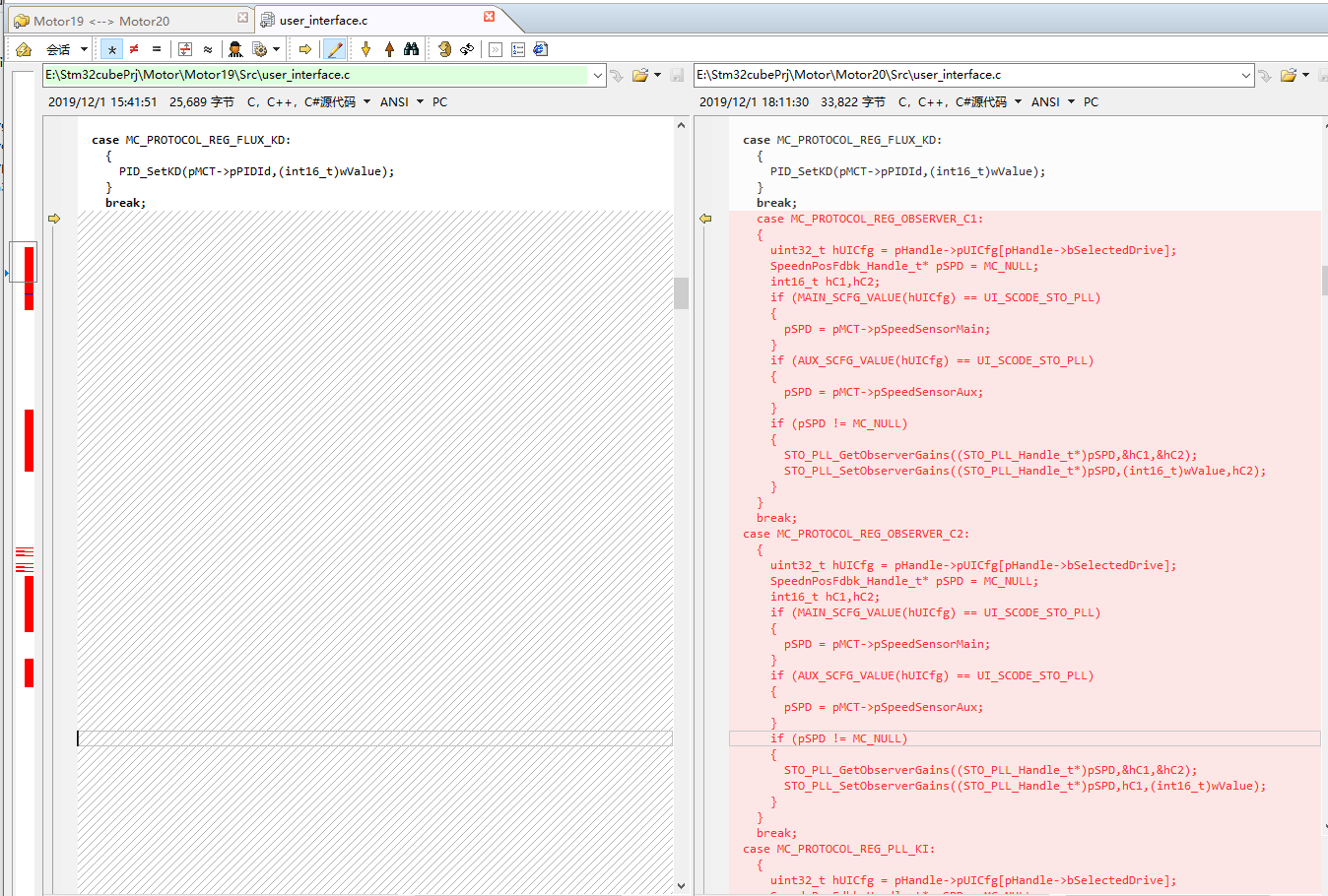
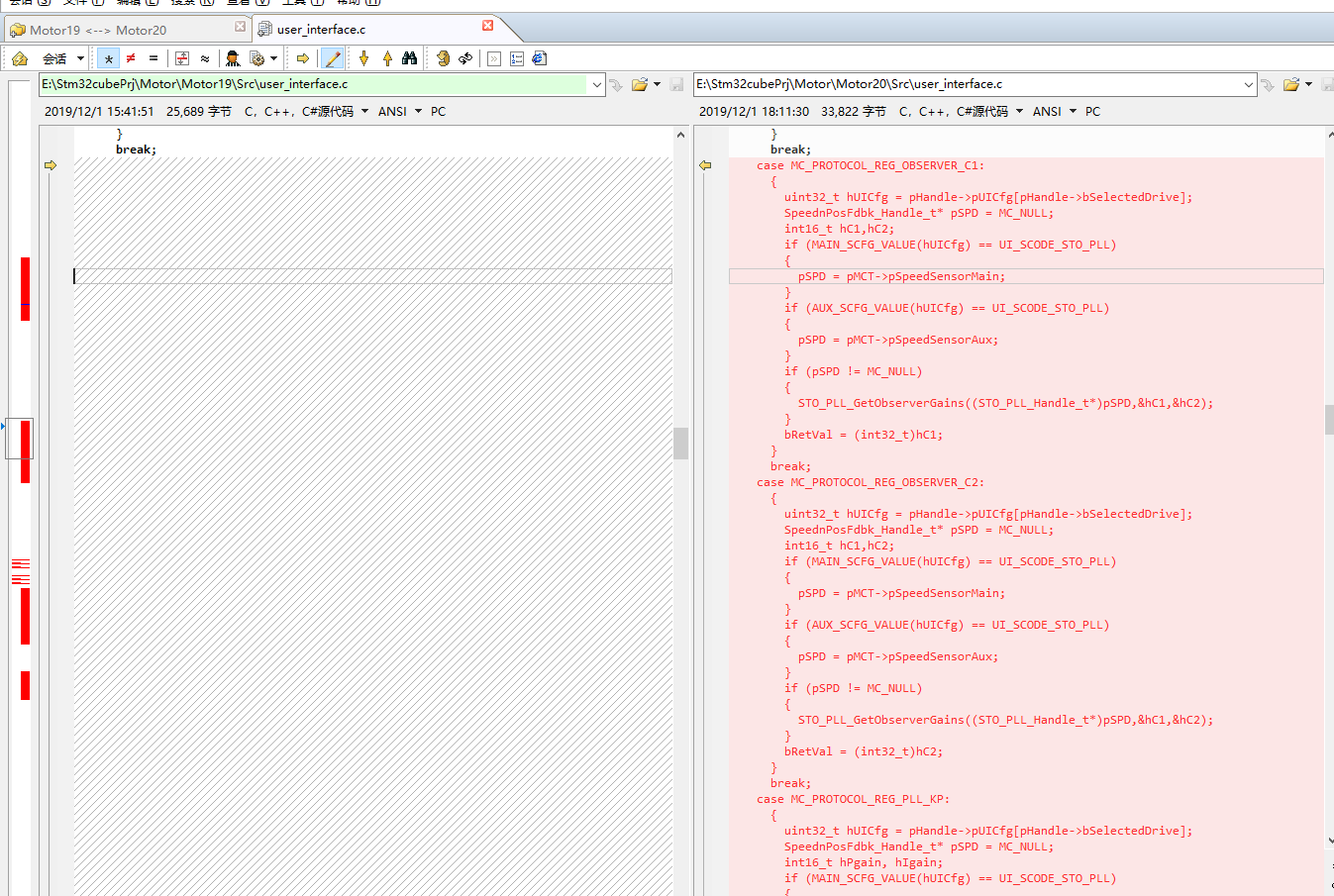
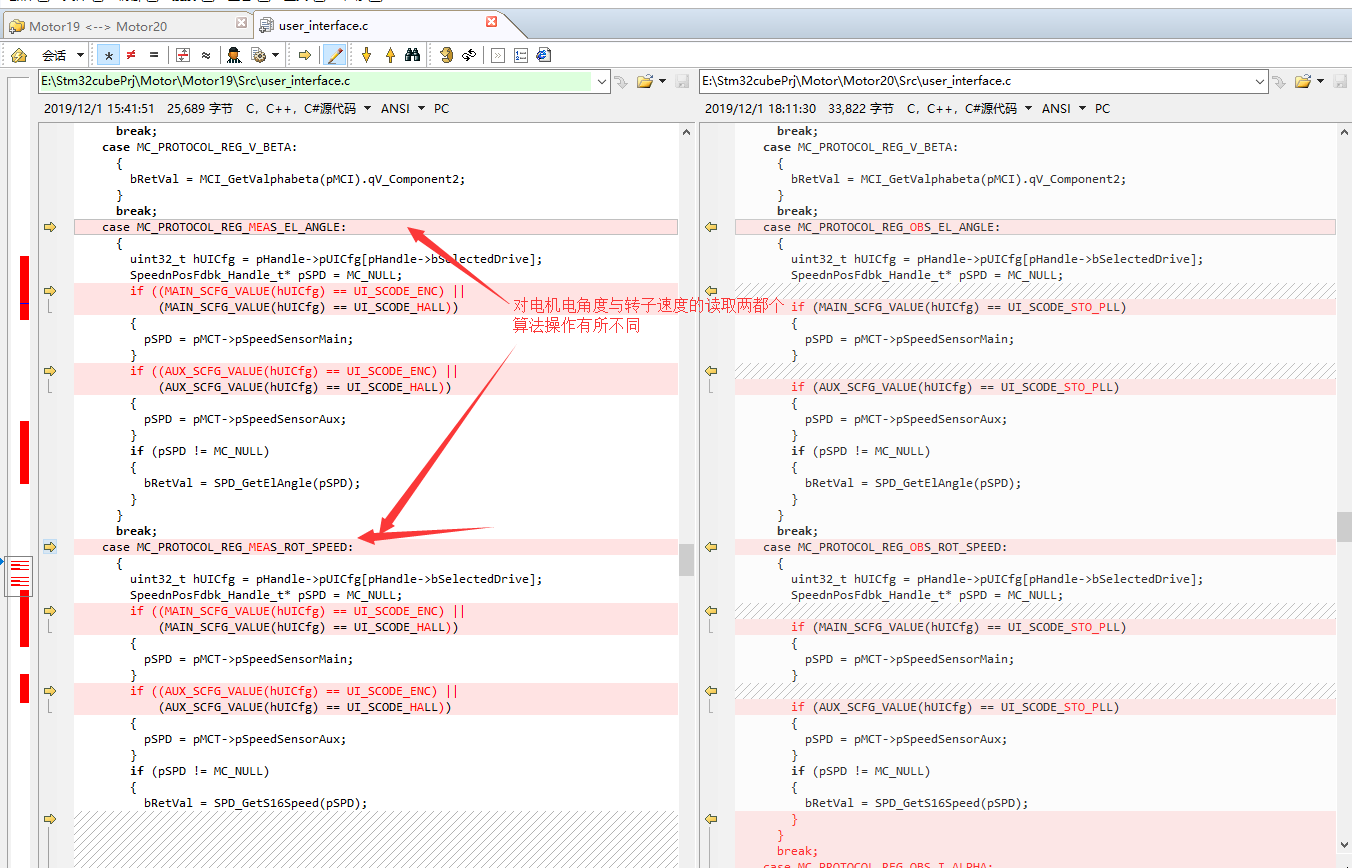
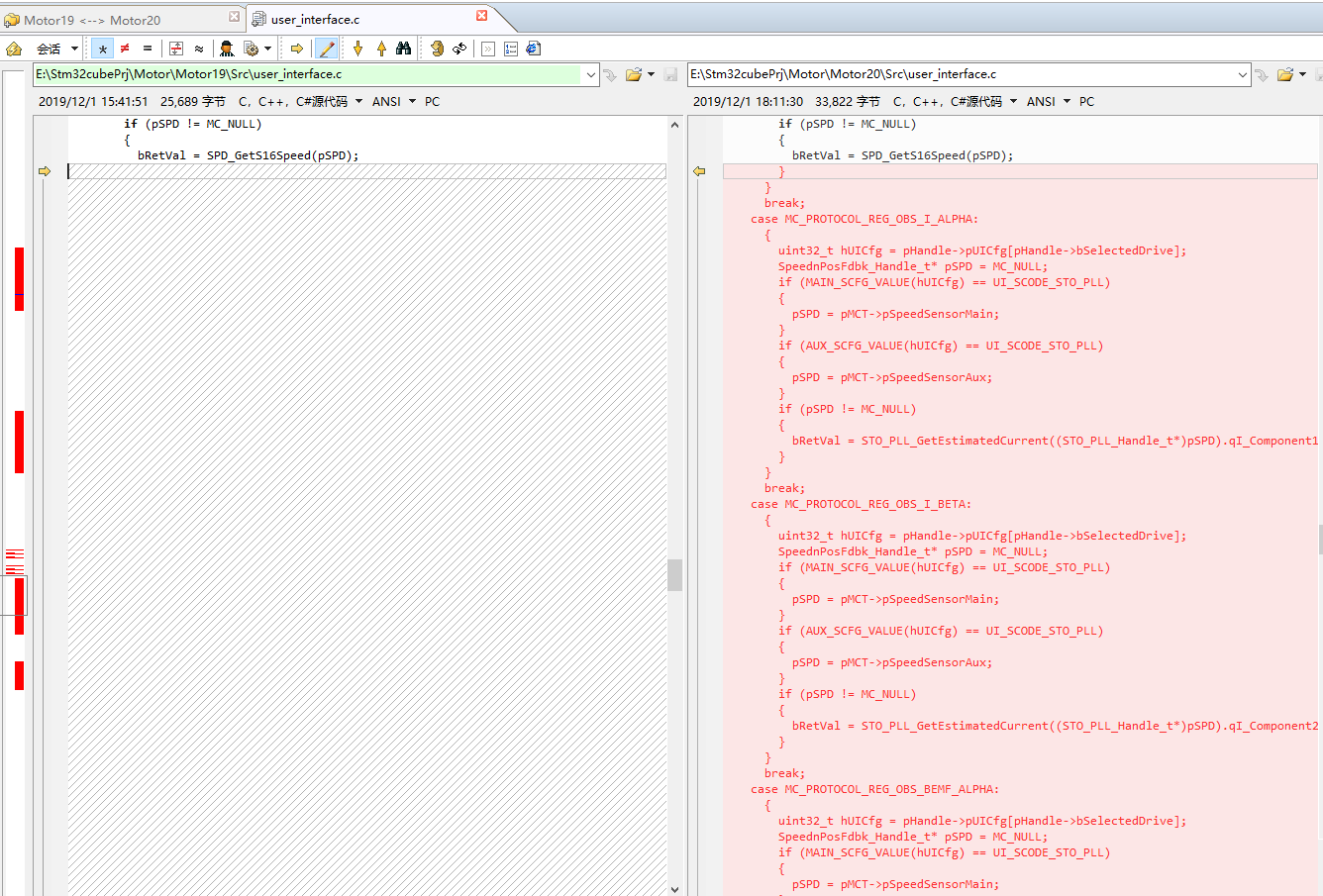
user_interface.c中无感FOC算法中多了多无法算法变量读取与设置功能接口的支持:
、 

到此,基于ST MCLIB的有感(hall)FOC算法与无感FOC算法代码实现差异分析就算完成了,下一节我们将在ST MCLIB无感FOC算法代码基础上进行修改,将其变成有感(HALL)FOC算法,让电机成功运转。本本节内容到此结束,也欢迎大家留言!!最后喜欢这个公众号的同学们记得加关注了,每天都会有技术干货推出!!
文中源码及资料下载,关注十三公众号:

在公众号里给十三发送 “下载|STM32 电机教程 21” :


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









