






实验坐标是这样的
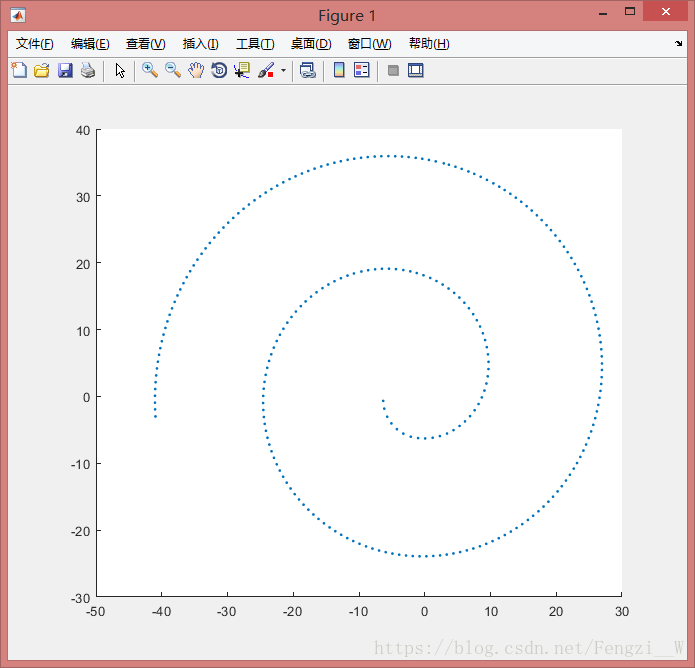
基本是一个阿基米德螺旋线,原数据是笛卡尔坐标系的,通过拟合半径与方位角之间的关系得到多项式
以下是多项式拟合
clc
clear
format long
shuju=xlsread('jingpan12')
x=flipud(shuju(:,1));
y=flipud(shuju(:,2));
r=sqrt(x.^2+y.^2);
jiaodu=acosd(x./r);
for i=1:1:19
jiaodu(i)=360-jiaodu(i);
end
for i=20:1:73
jiaodu(i)=360+jiaodu(i);
end
for i=74:1:147
jiaodu(i)=720-jiaodu(i);
end
for i=148:1:254
jiaodu(i)=720+jiaodu(i);
end
for i=255:1:257
jiaodu(i)=1080-jiaodu(i);
end
jiaodu=jiaodu*3.14./180;
plot(jiaodu,r);
p9=polyfit(jiaodu,r,9);
n=3.2:0.1:16;
y9=polyval(p9,n,'.');
hold on
plot(n,y9)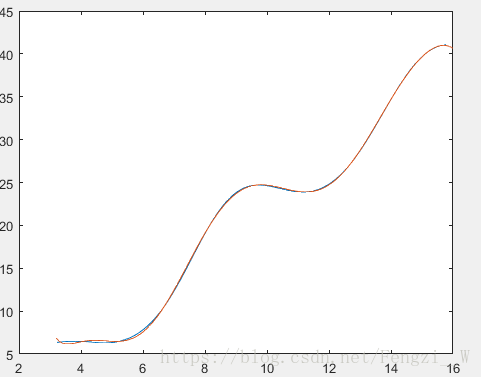 拟合结果
拟合结果
将数据回代,
clear all
clc
format long
shuju=xlsread('jingpan12')
p=[-5.00630375898308e-06,0.000460742305865134,-0.0182267190094672,0.404815073833663,-5.53480697324230,48.0789047375280,-264.371215185261,886.259566745230,-1645.21576472083,1297.95181501538]
for n=3.2:0.1:16;
p9=polyval(p,n);
c=p9*cos(n);
d=p9*sin(n);
plot(c,d,'.')
hold on
end
plot(shuju(:,1),shuju(:,2),'.')回代结果
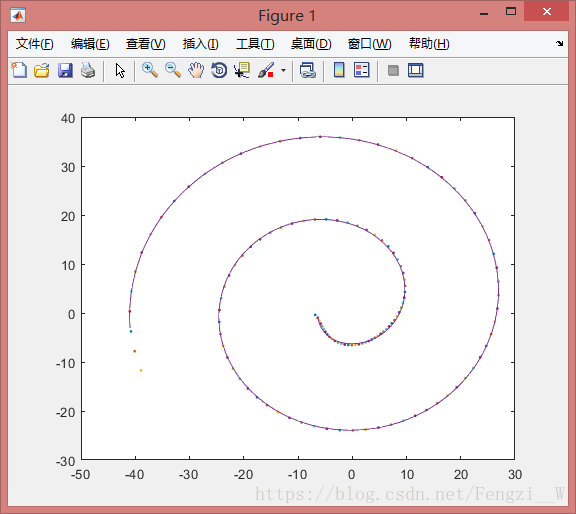
实线是元数据,点是拟合结果

















 4701
4701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









