






基于自抗扰控制器ADRC的永磁同步电机FOC
1.转速环采用ADRC,和传统PI进行对比来分析ADRC控制性能的优越性。
对ADRC中的ESO进行改进,进一步提高了ADRC性能。
2.提供算法对应的参考文献和仿真模型
仿真模型纯手工搭建,不是从网络上复制得到。
仿真模型仅供学习参考
YID:6258679478551456
努力惜春华JW
基于自抗扰控制器ADRC的永磁同步电机FOC
引言:
自抗扰控制器(Active Disturbance Rejection Control,简称ADRC)是一种基于扰动观测补偿的先进控制方法,在电机控制领域具有广泛的应用。本文将着重探讨在永磁同步电机场景下,将ADRC应用于转速环控制的优越性,并在此基础上对ADRC中的扰动观测器(Extended State Observer,简称ESO)进行改进,以进一步提高ADRC的性能。
-
转速环采用ADRC
传统的永磁同步电机转速环控制常使用PI控制器,其性能受到传统PID调参方法的限制。而ADRC作为一种基于扰动观测补偿的先进控制方法,可以有效克服传统PID控制器在扰动抑制等方面的不足。在本文中,我们将采用ADRC来实现永磁同步电机的转速环控制,以探究ADRC在这一场景下的性能优势。 -
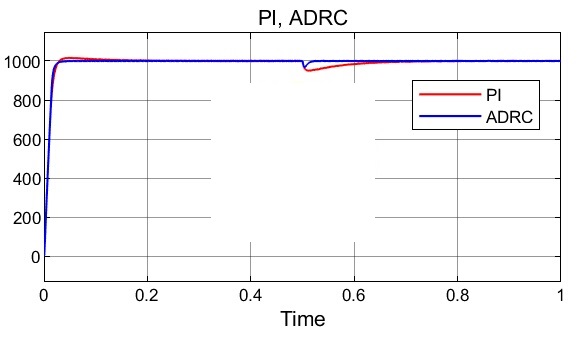
ADRC与传统PI控制的对比分析
为了分析ADRC控制性能的优越性,我们将ADRC与传统PI控制进行对比。首先,我们提出一种转速环控制性能的评价指标,例如过渡过程的时间、超调量等,然后在同一实验条件下,通过对ADRC和传统PI控制系统的参数调整和模拟仿真实验,对比两者在性能上的差异。通过实验结果的对比分析,我们可以清晰地看到ADRC相较于传统PI控制,在扰动抑制、响应速度等方面的优越性。 -
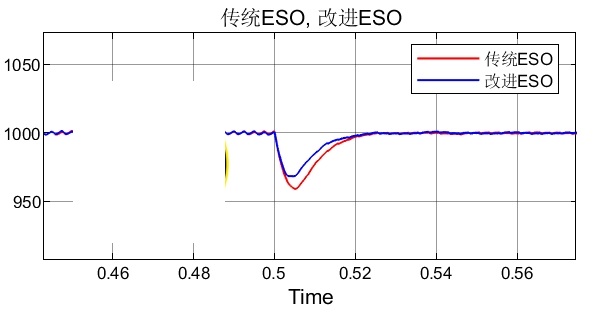
对ADRC中的ESO进行改进
ESO作为ADRC中的核心部件,其设计直接影响着整个控制系统的性能。为了进一步提高ADRC的性能,我们将对ESO进行改进。具体地,我们提出了一种改进的ESO算法,通过对ESO的参数和结构进行优化,进一步增强扰动观测的精度和稳定性。通过仿真实验,我们可以验证改进后的ESO对ADRC控制性能的提升效果。 -
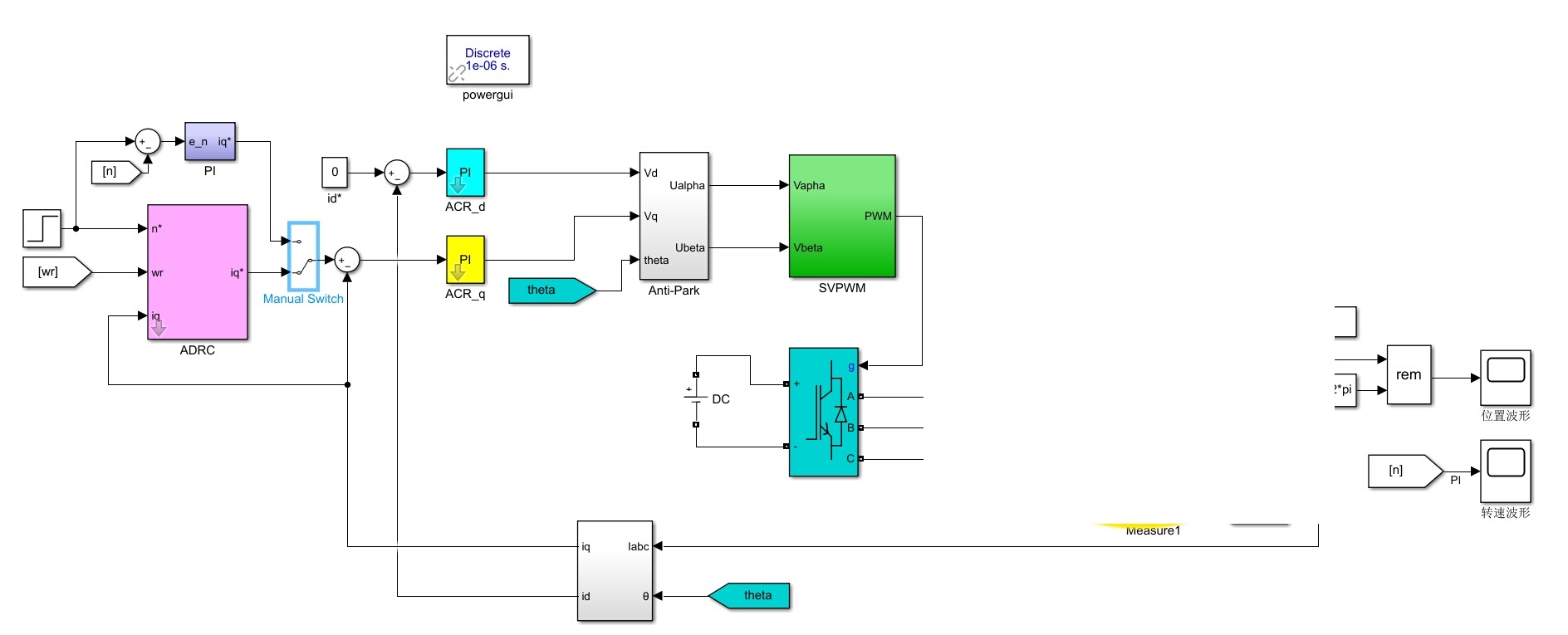
提供算法对应的参考文献和仿真模型
为了验证ADRC的控制性能,我们将提供对应的参考文献和仿真模型。参考文献将介绍ADRC在永磁同步电机控制领域的应用案例和相关研究成果,以提供理论依据和实验验证。仿真模型将基于我们自行搭建,确保模型的准确性和独立性。此外,我们强调仿真模型的纯手工搭建,并非从网络上复制得到,以保证模型的独特性和可靠性。
结论:
通过对ADRC在永磁同步电机FOC中的应用进行研究和分析,本文展示了ADRC相较于传统PI控制在控制性能上的优越性,并提出了一种改进的ESO算法以进一步增强ADRC的性能。通过提供参考文献和仿真模型,我们希望能为永磁同步电机FOC的控制设计和优化提供有益的参考和启示。
注:本文提供的仿真模型仅供学习参考,并非用于商业用途或实际系统控制,以确保模型的准确性和可靠性。
相关的代码,程序地址如下:http://matup.cn/679478551456.html
















 337
337











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









