






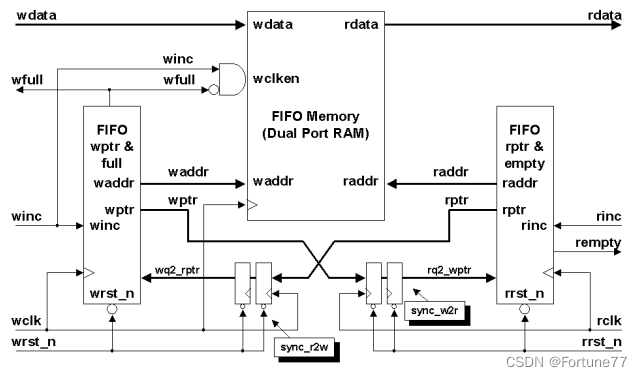
和同步fifo一样,中间是双口的ram,左右两个模块分别是读写地址的产生和判断空满信号。比如在FIFO wptr &waddr模块中产生ram的地址信号waddr,然后将waddr这个二进制编码的地址信号转换为格雷码来进行跨时钟域处理(注意,二进制编码转换格雷码是组合逻辑,组合逻辑的输出不能直接的进行跨时钟域,因为毛刺会影响跨时钟域的结果,需要将组合逻辑的输出放到寄存器中,之后再进行跨时钟域的处理)。在读时钟域下的rq2_wptr信号与原来的写时钟域的下的rptr信号来进行空状态的判断,以上是从写时钟域到读时钟域下的操作,从读时钟域到写时钟域同理。
使用格雷码的根本原因就是就算跨时钟域的时候,出现了亚稳态,整个fifo的功能也不会出现错误。比如用二进制的waddr来进行跨时钟域,比如waddr从7到8的变化(0111->1000),raddr此时处于6的位置,跨时钟域的时候,寄存器会随机的取到中间状态的一个值,所以在rq2_wptr处得到的结果可能是2,此时raddr是6,相当于fifo存就存到了2,读却读到了6,这样会使fifo的功能错误。如果使用格雷码,waddr从7到8的变化(0100->1100),中间就涉及到了一个值的变化,就算出现亚稳态,不是1100就是0100,是1100的话,正好功能正确,如果是0100的话,不影响fifo的读,最多可能出现fifo的假空判断,不会出现fifo功能的错误,即读大于写(读指针指向当前的值,写指针指向下一时刻的值)
在格雷码的基础上,扩展一位最高位,这个最高位可以方便判断空满,当写指针转了一圈又回来,说明把fifo写满了,此时读指针没有动的话,说明fifo是满的,此时扩展后的读指针和扩展后的写指针最高位不同,其他位置都一样。如果fifo是空的话,二者全相等。空标志在读时钟域判断,满标志在写时钟域判断
假空假满根本原因是因为打两拍的原因,比如写指针打两拍到了读时钟域,此时写指针已经大于了同步的写指针,如果此时判断为空的话,实际上,写指针在同步的时间里已经存了值进去,这样就是假空。假满同理,但是这个对fifo功能没有影响,比如fifo的深度是6,在1的时候空标志位拉高,只能说fifo实际的深度只有5,这是一种保守设计,对功能没影响。
关于异步FIFO设计,这7点你必须要搞清楚_孤独的单刀的博客-CSDN博客_异步fifo为什么要打两拍
这篇文章从快慢时钟详细的分析了空满的判断已经对fifo功能影响
二进制编码转换格雷码是组合逻辑,组合逻辑的输出不能直接的进行跨时钟域,因为毛刺会影响跨时钟域的结果,需要将组合逻辑的输出放到寄存器中,之后再进行跨时钟域的处理
async_fifo的设计代码(欢迎大家挑错)
module async_fifo(wclk,wr,din,full,rclk,rd,dout,empty,rst_n);
parameter data_width = 16;
parameter data_depth = 8;
parameter ram_depth = 256;
input rst_n;
input wclk;
input wr;
input [data_width-1:0] din;
output full;
input rclk;
input rd;
output [data_width-1:0] dout;
output empty;
reg [data_width-1:0] dout;
wire empty;
wire [data_depth-1:0] wr_addr;
wire [data_depth-1:0] rd_addr;
reg [data_depth:0] wr_addr_ptr;
reg [data_depth:0] rd_addr_ptr;
reg [data_depth:0] wr_addr_gray_rdy;
wire [data_depth:0] wr_addr_gray;
reg [data_depth:0] wr_addr_gray1;
reg [data_depth:0] wr_addr_gray2;
reg [data_depth:0] rd_addr_gray_rdy;
wire [data_depth:0] rd_addr_gray;
reg [data_depth:0] rd_addr_gray1;
reg [data_depth:0] rd_addr_gray2;
assign wr_addr = wr_addr_ptr[data_depth-1:0];
assign rd_addr = rd_addr_ptr[data_depth-1:0];
assign wr_addr_gray = (wr_addr_ptr >> 1) ^ wr_addr_ptr;
assign rd_addr_gray = (rd_addr_ptr >> 1) ^ rd_addr_ptr;
reg [data_width-1 : 0] ram_fifo [ram_depth-1:0];
integer i;
always@(posedge wclk or negedge rst_n)
if(!rst_n)begin
for(i=0;i<ram_depth;i=i+1)
ram_fifo[i] <= 0;
end
else if(wr && (!full))
ram_fifo[wr_addr] <= din;
always @(posedge rclk or negedge rst_n) begin
if(!rst_n)
dout <= 0;
else if(rd && (!empty))
dout <= ram_fifo[rd_addr];
end
always @(posedge wclk or negedge rst_n) begin
if(!rst_n)
wr_addr_ptr <= 0;
else if(wr &&(!full))
wr_addr_ptr <= wr_addr_ptr + 1;
end
always @(posedge rclk or negedge rst_n) begin
if(!rst_n)
rd_addr_ptr <= 0;
else if(rd &&(!empty))
rd_addr_ptr <= rd_addr_ptr + 1;
end
always@(posedge wclk or negedge rst_n) begin
if(!rst_n)
wr_addr_gray_rdy <= 0;
else
wr_addr_gray_rdy <= wr_addr_gray;
end
always@(posedge rclk or negedge rst_n) begin
if(!rst_n)
rd_addr_gray_rdy <= 0;
else
rd_addr_gray_rdy <= rd_addr_gray;
end
always@(posedge wclk or negedge rst_n)begin
if(!rst_n)begin
rd_addr_gray1 <=0;
rd_addr_gray2 <=0;
end
else begin
rd_addr_gray1 <= rd_addr_gray_rdy;
rd_addr_gray2 <= rd_addr_gray1;
end
end
always@(posedge rclk or negedge rst_n)begin
if(!rst_n)begin
wr_addr_gray1 <=0;
wr_addr_gray2 <=0;
end
else begin
wr_addr_gray1 <= wr_addr_gray_rdy;
wr_addr_gray2 <= wr_addr_gray1;
end
end
assign empty = (wr_addr_gray2 == rd_addr_gray)? 1'b1:1'b0;
assign full = (wr_addr_gray[data_depth:data_depth-1'b1] != rd_addr_gray2[data_depth:data_depth-1'b1]) && (wr_addr_gray[data_depth-1:0] == rd_addr_gray2[data_depth-1:0]);
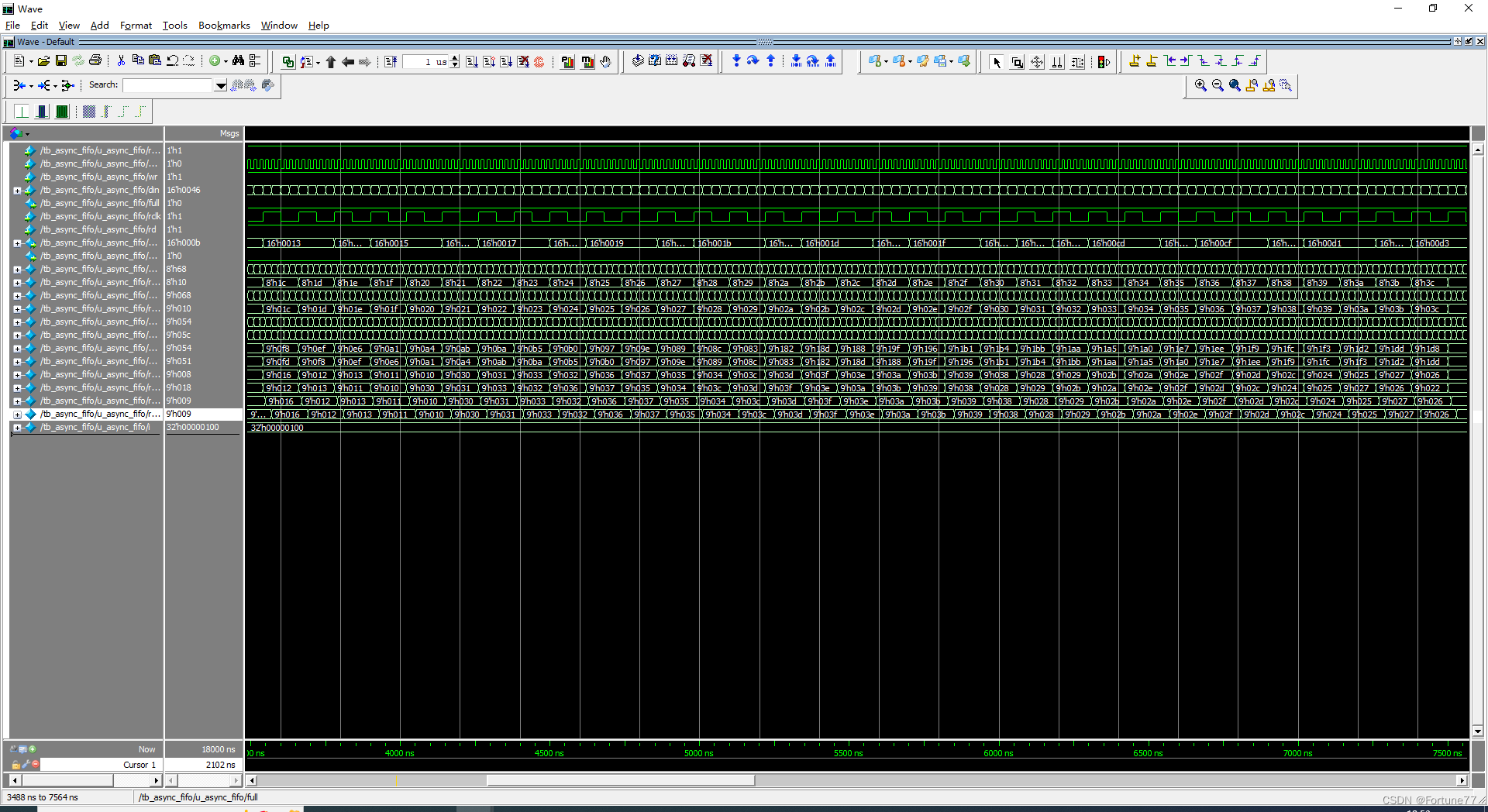
endmodule仿真波形















 1198
1198











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









