







本章主要内容
关键概念:最优状态值(optimal state value)和最优策略( optimal policy);
函数工具:贝尔曼最优方程(the Bellman optimality equation (BOE))
一、激励性例子(Motivating examples)
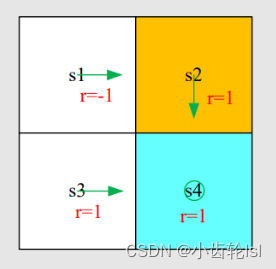
第一步:根据实例写出每个状态对应的贝尔曼方程:
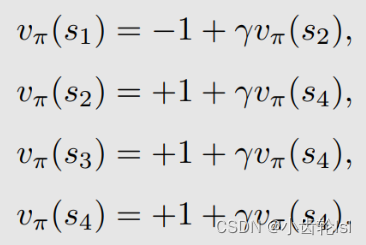
第二步:求每个状态对应的状态值(state value),假定这里的=0.9,先由第四个式子求s4的状态值(state value),再求s1,s2,s3的状态值(state value):

第三步:根据上一步求出的状态值(state value),再求出动作值(action value),这里以s1状态为例,求s1状态时各个动作的动作值(action value),每一个状态都有5个可采取的动作,故有相应的5个动作值(action value),而每一个动作action也对应着一个策略和状态值(state value):
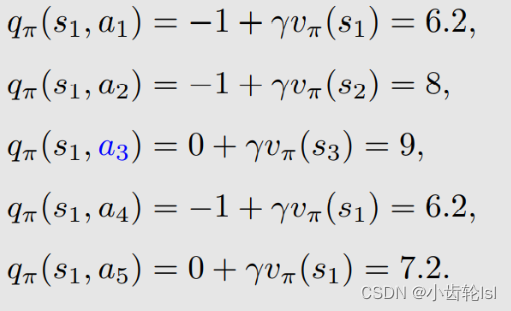
总结:从上述求解得到的动作值(action value)可知,在采取动作a3的时候值是最大的,因此这个策略也是最优的。采取动作a3的时候值是最大的原因是s3状态是一个可进入的网格。
改进:在上述例子中,可以看到在s1状态的时候,当前的策略是:
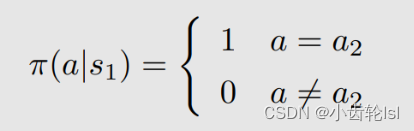
通过在第二步和第三步对状态值(state value)和动作值(action value)求解并对比之后可知,在s1状态时,采取动作a3的策略是最优的,因此我们选择一个新的策略(式子中的就是得到最优策略的动作,在本例中是a3):
总结:
- 动作值(action value)就是评估动作的主要参数,如果选择一个动作action之后,它对应的动作值action value很大,那么证明可以得到更多的reward,相应的策略也更好;
- 在计算过程中,利用不断地迭代,就可以得到一个最优策略。就是首先对每个状态都选择 action value 最大的 action,选择完了一次,然后再来一次迭代得到一个新的策略,再迭代得到一个新的策略,最后那个策略一定会趋向一个最优的策略。
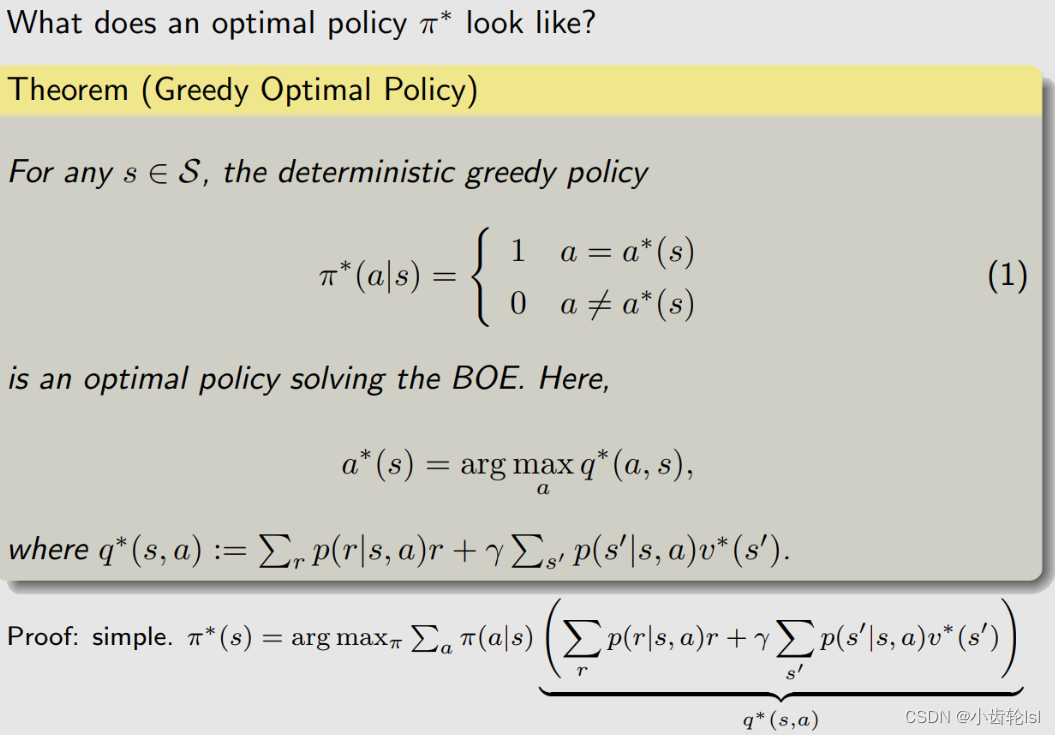
二、最优策略(Optimal policy)
状态值(state value) 是评估一个策略是否最优,如果有一个策略,它的状态值比在这个状态所有其他策略的状态值都要大,那么这个策略就是最优策略:
三、贝尔曼最优方程(Bellman optimality equation (BOE))
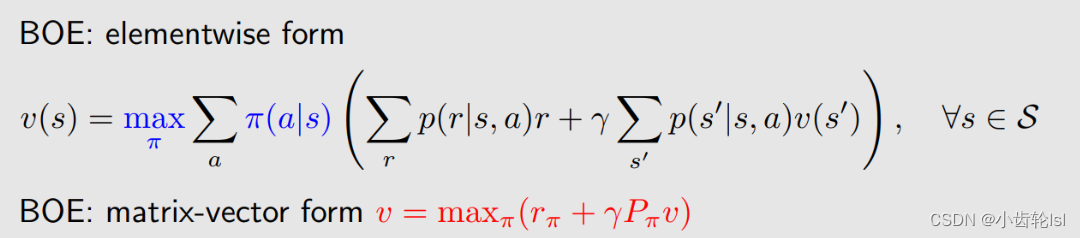
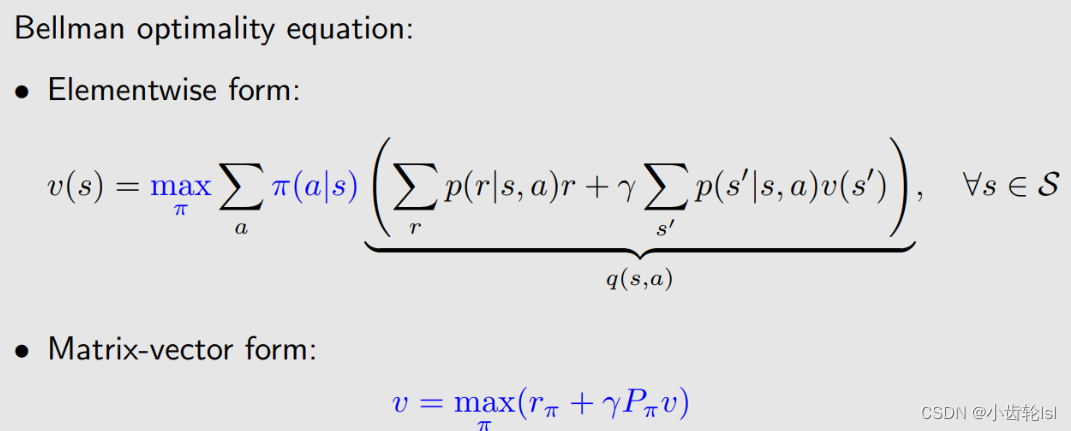
贝尔曼最优方程:
方程中p(r|s, a), p(s'|s, a) 已知;v(s), v(s‘)未知要计算得到;π(s) 未知(贝尔曼公式依赖于一个给定的 π,而贝尔曼最优公式的 π 没有给定,需要求解)。

贝尔曼最优方程的矩阵向量形式Bellman optimality equation (matrix-vector form):
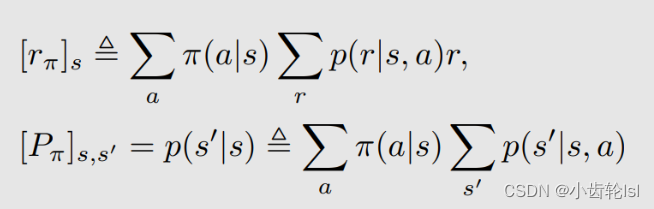
公式右边两个元素的推导式如下,在第二章中有推导:
总结:
- 贝尔曼方程描述了最优策略和最优状态值state value;
- 贝尔曼公式的π(a|s) 是给定已知的,依赖于一个给定的 π;
- 在贝尔曼公式前面加上了 max_π成为贝尔曼最优公式,这时候 π 就不再是给定的了,因为这里面嵌套了一个优化问题,需要先解决这个优化问题求解出这个 π,再把这个 π 带到这个式子里面去,求解出状态值。
四、贝尔曼最优方程右侧的最大值(Maximization on the right-hand side of BOE)
先看贝尔曼最有方程,如果右侧有最大值,那么最优策略也相应的求出:
右侧的最大值求解思路
贝尔曼最优方程中,有一个式子,却有两个未知量(状态值 v 和策略 π,对任意一个状态都要求出来最优的一个 π)。
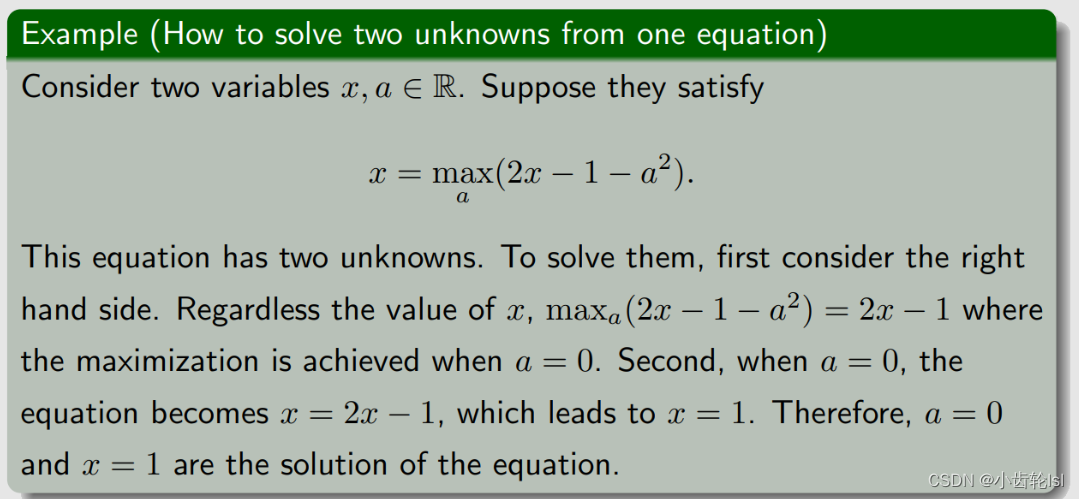
第一步
在下边的简单例子中,如果想要使2x-1-a2的值最大,显然当a=0的时候有最大值;这时方程消除a后是x=2x-1,计算得x=1,即当x=1,的时候方程有解。
照着这个思路可以总结出:
- 最初的方程中已知与未知的值:p(r|s, a), p(s’ |s, a), r, γ 已知;v(s), v(s‘ ) 未知;π(s) 未知;
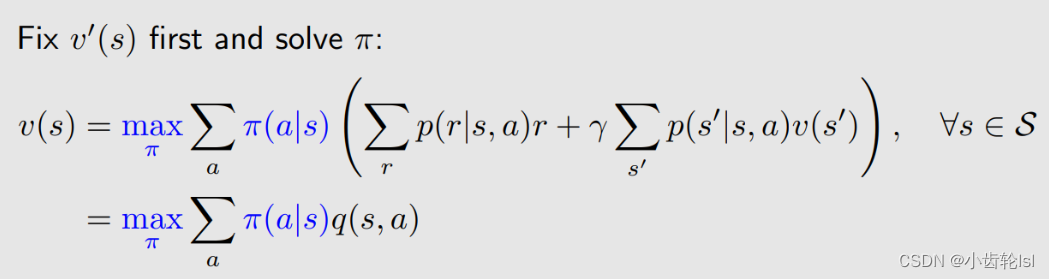
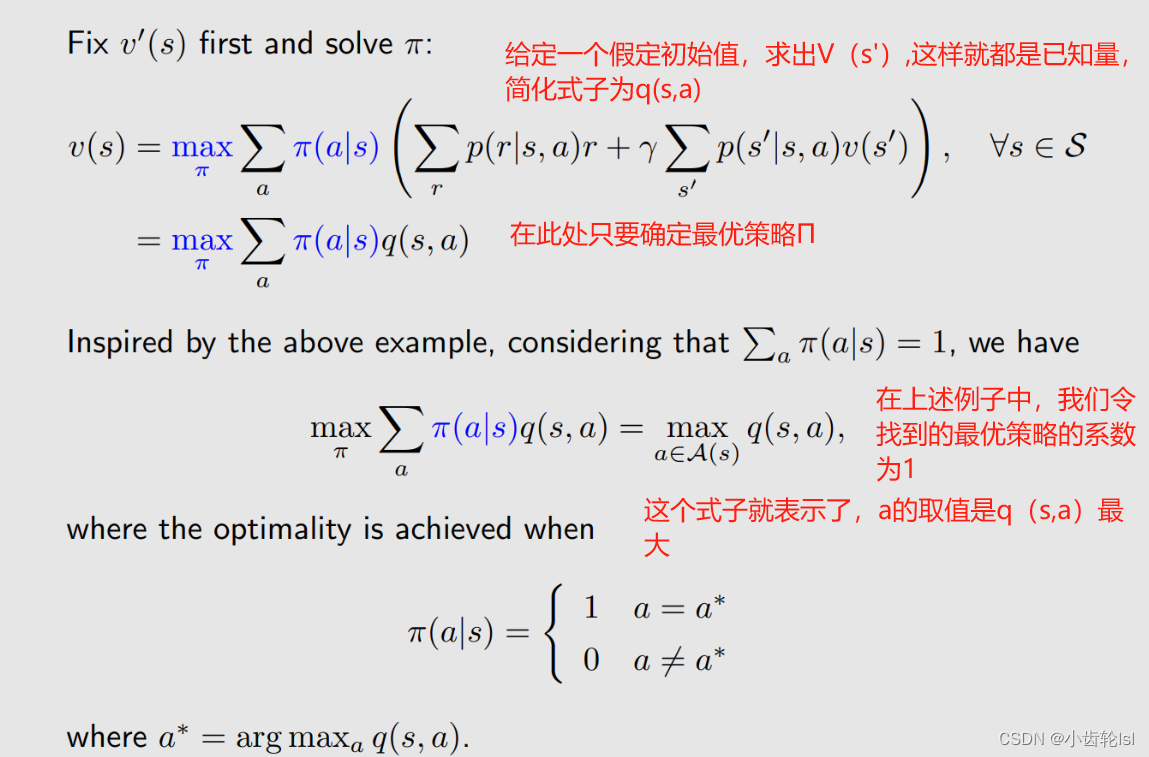
- 固定 v(s') 并求解 π,即给出 v(s') 的一个初始值,把初始值给定后,v(s') 变成已知的,第一行的大括号内部写成 q(s,a),是已知的。下面要做的是把 π(a|s) 确定下来;
- 这里有多个 action,在网格世界中有 5 个 a,q(s, a1),q(s, a2),q(s, a3),q(s, a4),q(s, a5)。
列式子:
第二步
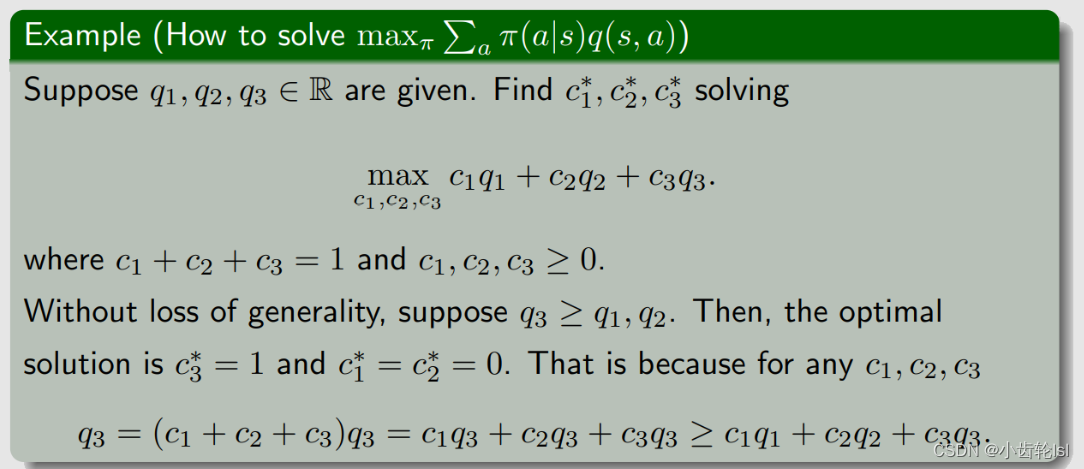
- 为了求解π(a|s) ,再给出一个例子,假如已知三个 q 值,要解决的问题是求解三个系数或者叫三个权重,使得下面的目标函数(object function)达到最大;
- 系数和权重应该满足和为 1 ,并且每个值都大于等于 0,之所以有这样的约束,是因为这个例子里面的系数对应上面的概率 π(a|s) ,概率 π 满足这样的性质;
- 假设 q3 是最大的,最优解是 c3* = 1,c1*=c2*=0;
照着这个思路可以总结出:
通过上面的例子,我们就知道了如果右边的 q(s,a) 确定了,如何求解最优的 π(a|s),最后的结果就是右边这一项的最优值等于最大的 q(s,a) 值,这里 π(a|s) 的选取应该是对于 a* 等于 1,不是 a* 等于 0,这里 a* 对应最大的 q 值的 action,即 q(s,a*) 是所有 v 的取值里最大的。
五、贝尔曼最优公式的求解(Solve the Bellman optimality equation)
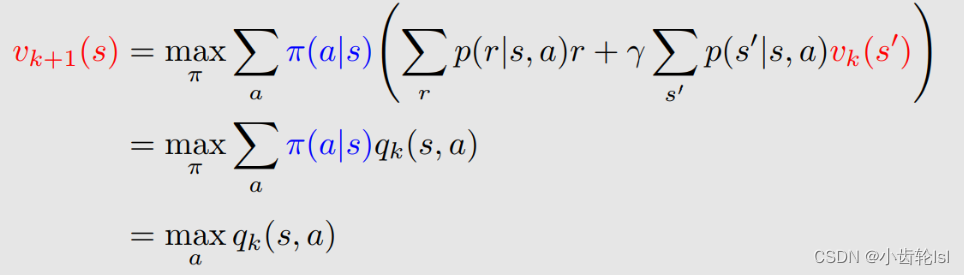
把等式右侧写成一个函数 f(v),之所以这样是因为求解等式右侧最大值 max_π 的方法是先固定 v ,就可以求出一个 π,至于这个 π 是什么样子,最后得到的最优值是什么不用太关心,我们知道右侧肯定是 v 的一个函数。本来右侧是 π 和 v 的函数,现在把 π 确定下来了,右侧就变成了 v 的函数(与上面第一个例子一样)
- 对每一个v,都能求出一个max,这个max是和v有关的式子。那么把v看成变量,max就是v的函数了,把这个函数定义成f(v);
- π 是 v 的函数,老师说了,所以右边整体都是v的函数;
- 冒号等号代表定义的意思;
- 其实就是分两步,第一步求max, 消掉Π; 第二步求出v;
- 其实就是Π已知了,要开始求最大的state value;
- 贝尔曼方程实际上是一组方程,对每一个状态都有一个贝尔曼方程;
- 和选取的动作的概率无关,因为取最大值适合概率是1,所以只需要考虑v的值;
- 参考前面向量形式的展开,这里f(v)第s个元素对应的是s下的最大v(s)。
优化后的贝尔曼公式:
下面我们求解贝尔曼最优公式就求解 v = f(v) 即可。
六、收缩映射定理(Preliminaries: Contraction mapping theorem)
1.收缩映射定理(Preliminaries: Contraction mapping theorem)定义
不动点(Fixed point):点 x 属于集合 X,f 是一个映射(或者叫函数),如果满足 f(x) = x,则 x 就被称为一个不动点。

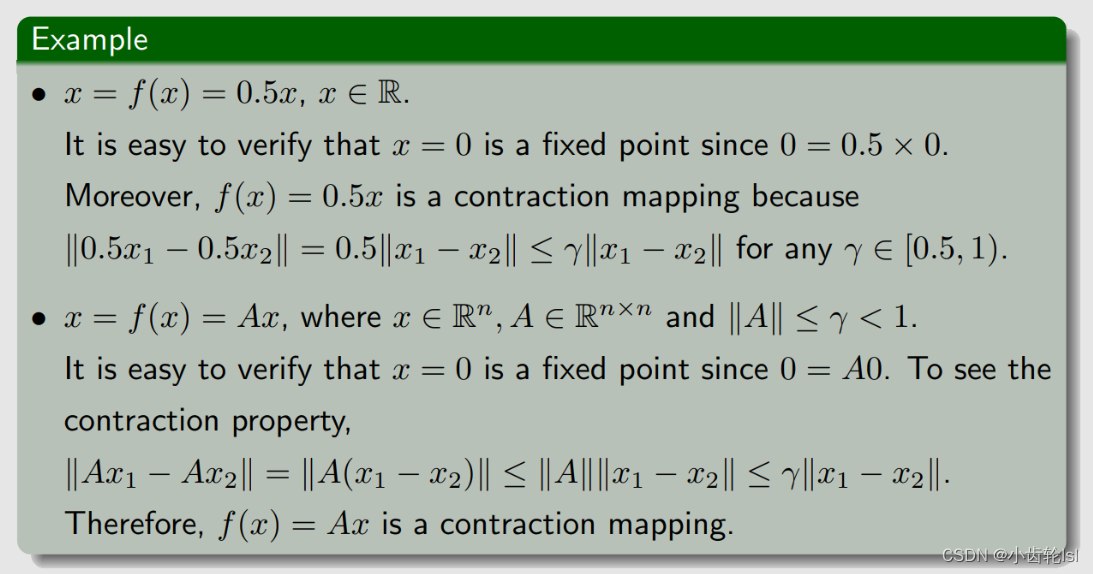
收缩映射Contraction mapping(或收缩函数contractive function)(mapping 和 function其实是一回事):f 是收缩映射(contraction mapping),如果满足:(伽马可以自由选择的,只要在0到1之间)
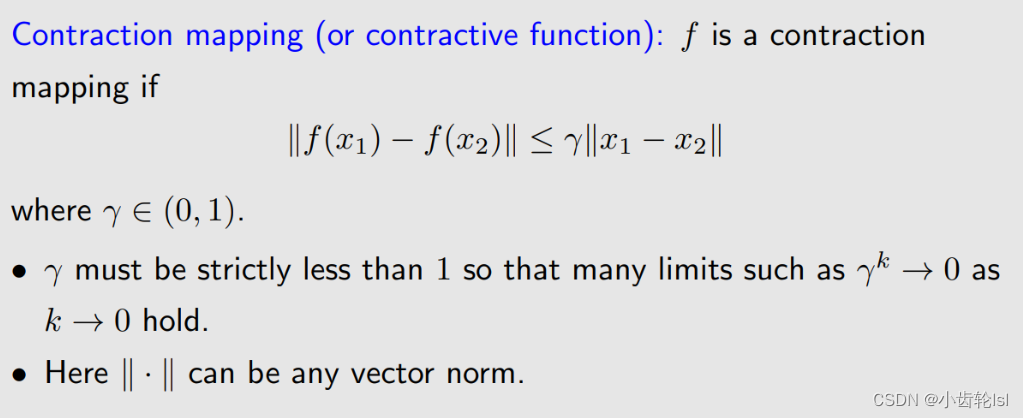
下边是一个说明解释的例子:
Contraction mapping theorem定理:
对于任何形式为 x = f(x) 的方程,如果 f 是收缩映射,那么满足
- 存在性:存在一个满足 f(x*) = x* 的不动点(fixed point) x*。我们不太关心 f 的表达式究竟是什么,只要它是一个 Contraction mapping,就一定存在一个不动点(fixed point)满足 f(x*) = x*;
- 唯一性:不动点(fixed point) x* 是唯一存在的;
- 算法(求解这样的一个不动点(fixed point)的算法): 考虑一个序列 {xk},其中 xk+1 = f(xk) (迭代算法),则当 k → ∞ 时, xk → x*(即 xk 会收敛到 x*) 。此外,收敛速度是指数级的,非常快。(先给一个 x0,x1=f(x0) 求出 x1;再用 x2=f(x1)求出 x2,以此类推,求出的 xk 会收敛到 x*)
2.例子
通过收缩映射定理和迭代算法来求解

七、贝尔曼最优公式的收缩特性(Contraction property of BOE)
1.推导过程
让我们再回到贝尔曼最优方程:v = f(v),这个就是 Contraction mapping 要解决的那一类问题:
为了应用 Contraction mapping theorem ,我们首先要证明贝尔曼最优公式里面的 f(v) 是一个 Contraction mapping:
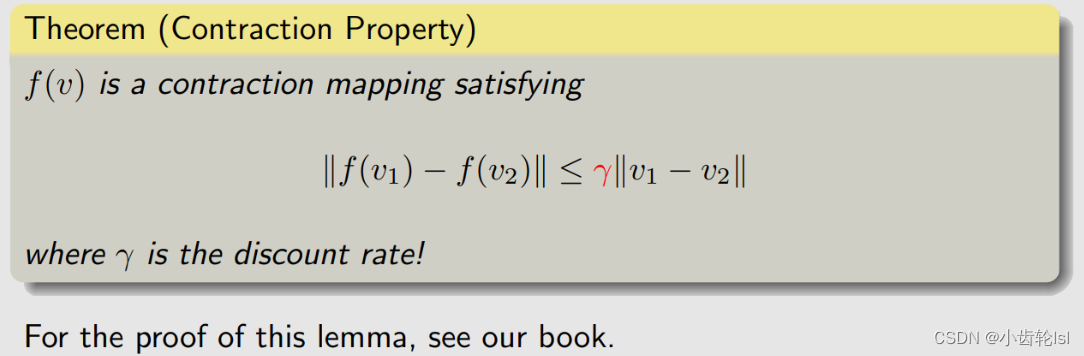
我们知道了 f(v) 是一个 Contraction mapping,那么贝尔曼最优公式就可以立刻用收缩映射定理(Contraction mapping theorem)来求解出来,可以得到以下结果:
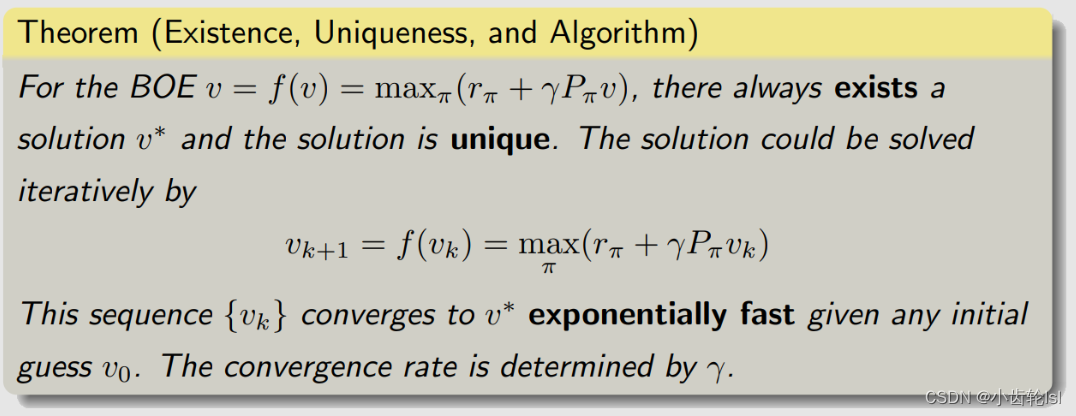
在这个贝尔曼最优公式的收缩性质下,我们可以计算得到总是存在一个解V*,且这个解是唯一的;这个解可以通过迭代算法来求解得出(迭代的原理就是,先给定一个猜测的V0,然后逐渐迭代收敛,最后得到的Vk就收敛于V*,这个迭代收敛速度很快,并且取决于γ值)
下面详细解析一下由 Contraction mapping theorem 给出的迭代算法:
迭代算法矩阵向量形式(Matrix-vector form):

化成元素形式(Elementwise form):即对于某一个具体的 s 状态这个算法是怎么运行的:
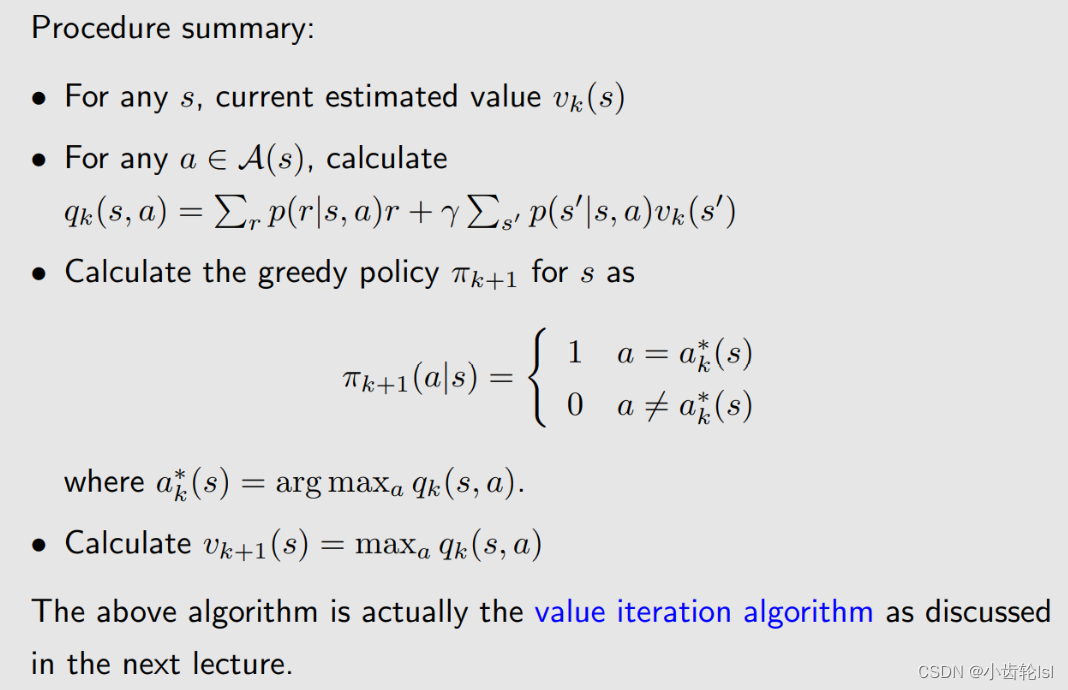
总结:
- 对任意状态 s,即当前我们对解 v*(s) 有一个估计,这个估计是 v_k(s),最开始可以是 v_0(s),这个可以是任意的一个值;
- 对任意状态 s 下的每一个 action,求解 q_k(s,a) , v_k(s’) 是刚才第一步给定的;
- 计算 s 的贪婪策略 πk+1 如下:基于 q_k(s,a) 我们得到一个新的策略,这个策略是 π_k+1(a|s) 会选择最大的 q_k(s,a) 对应的 a_k*(与第五部分思想一样);
- 计算 v_k+1(s) = max_a q_k(s, a) ;
- 下边算法实际上就是下一讲中讨论的值迭代算法(value iteration algorithm),这个算法其实计算由 Contraction mapping theorem 给出来的算法。
2.例子
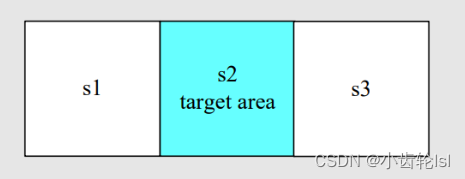
动作:a_l、a_0、a_r 代表向左走、保持不变、向右走。
奖励:进入目标区域: +1;尝试走出边界:-1;其他:0

q(s, a) 的值(建立 q-value 的一个表 table)(这里的 q 是第五部分那个非常长的一串可以缩写成这样的一个 q;
q-value 其实可以理解为state value的一个action下的值,这里的 q-value 就是 action value。
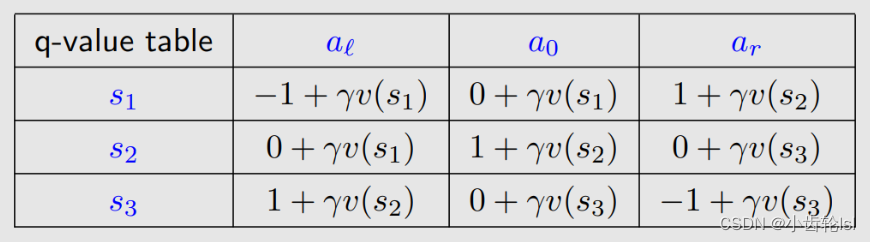
我们的目标是找到 v*(s_i) 和 π*(此时我们还没有将 v* 和 π*究竟是什么,我们只知道它是能够求解出贝尔曼最优公式对应的值和策略,之后我们会知道它们就是最优的状态值 state value 和最优的策略)
初始化v空间->找到各s处使v最大的a(得到policy)->更新v,重复
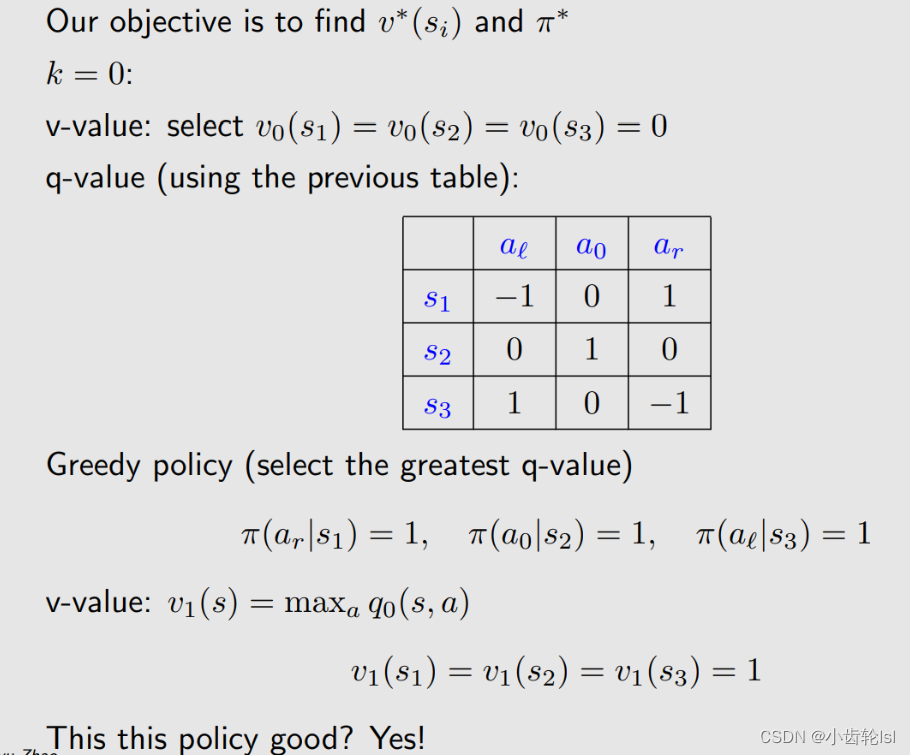
这个策略已经不错了,画出图后发现可以到达目标状态,已经达到了最优策略,但是 v 还没有达到贝尔曼最优公式的最优的解,所以还要继续迭代算下去,在考虑下一个 interation
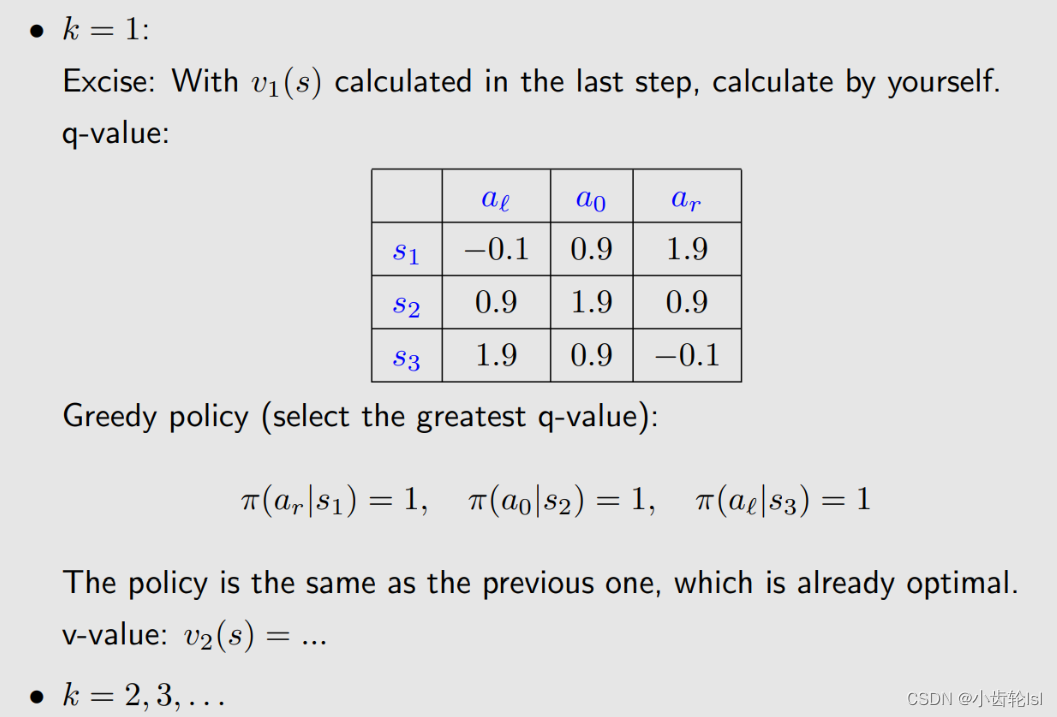
可以无限迭代下去,如果要编程实现,可以写一个迭代终止条件,两者之差若小于一个很小的数字,我们任务再去迭代也没什么太大变化了,可以停下,认为 v_k 达到了贝尔曼最优公式的解
八、贝尔曼最优公式最优策略(Policy optimality)
假设 v* 是贝尔曼最优方程(BOE)的解,可以用刚才介绍的算法求解出来。它满足:

假设:

π* 是对应 v* 的一个最优的策略,也就是把 v* 固定住,可以求解出来一个 π ,这个 π 我们用 π* 来表示,那么把公式 2 代入公式 1,公式 1 可以化成下面的式子,也就是把前面的 max_π 去掉了,把它改成了 π*
上面的公式 3 其实就是一个贝尔曼公式,因为贝尔曼公式一定是对应一个策略,那么上式就是对应 π* 的一个贝尔曼公式,这里的 v* = v_ π*,也就是 π* 对应的 state value,所以贝尔曼最优公式是一个特殊的贝尔曼公式,贝尔曼最优公式中对应的策略比较特殊,是一个最优的策略。

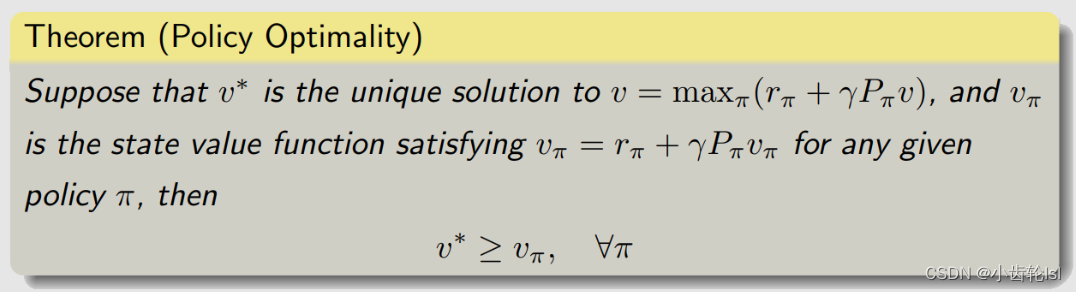
对于贝尔曼最优公式的解 v*,它是最大的 state value,对于任何一个其他的策略(policy)π,所得到的状态值(state value)v_ π 都没有 v* 大。那么相应的 π* 肯定是一个最优的策略,因为 π* 所对应的 v* 就是 v_ π*,它对应的 state value 达到最大。
现在我们明白为什么要研究贝尔曼最优公式(BOE)了。这是因为它描述了最优状态值(optimal state value)和最优策略(optimal policy)。
那么 π* 长什么样子?之前讲过,我们应该不陌生,也就是在状态 s 的时候 π* 会选择 a*,也就是在状态 s 对应的 action value 最大的那个 action,对这个 action 概率是 1,对其他 action 概率是 0.所以它是确定性 deterministic 的,也是贪婪 greedy 的,就是不论什么,反正就选择最大的。
九、.分析最优策略(Analyzing optimal policies)
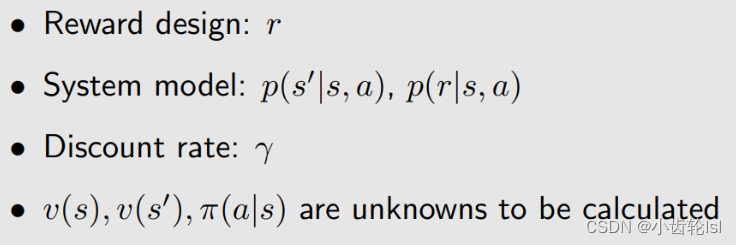
从下面的贝尔曼最优公式(BOE)可以清晰地看到:

我们要做的是求出黑色字体的变量,它们分别对应了最优的策略和最优的 state value ;我们已知的是这些红色字体的变量,它们分别对应了概率,这个概率就代表了系统的模型;r 是我们设计的奖励(reward);γ 是折扣因子。
求解贝尔曼最优公式就是在已知红色的量的时候求出黑色的量,那么显然最优的策略和最优的 state value 就是由这些红色的量来决定:他们分别是怎么设计 r,怎么选择 γ,还有系统模型是什么样的
接下来,我们用实例来说明当我们改变 r 和 γ 的时候,最优策略会发生什么样的改变(因为系统模型一般很难改变,所以我们不考虑这个)。
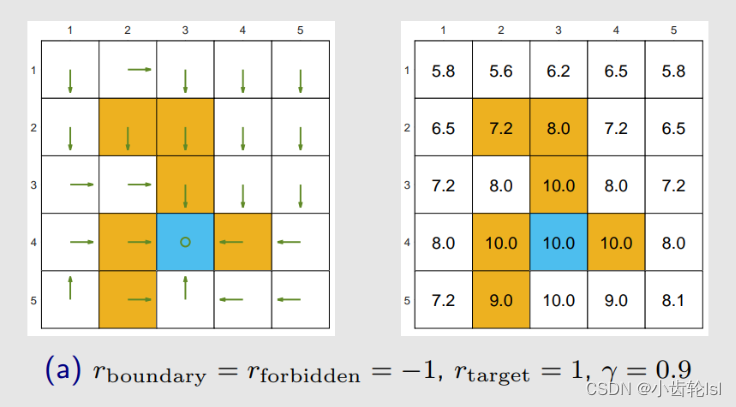
例子
通过求解贝尔曼最优公式(BOE),可以得到最优策略(左图绿色箭头)和相应的最优状态值(state value)(右图格子上的数字)。观察最优策略可以看出,最优策略没有绕开禁区(forbidden area),因为它发现进入禁区虽然暂时得到一个负数的惩罚,但是从长远来看我进入禁区到达目标所得到的回报(return)比绕一大圈再到达目标获得的回报(return)更大。最优策略敢于冒险:进入禁区!!
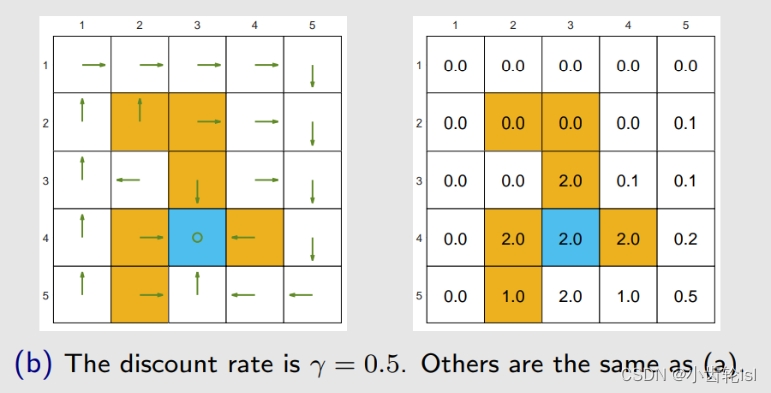
如果我们将 γ = 0.9 改为 γ = 0.5(其他参数不变,即设计的奖励 r 不变),由左图绿色箭头可以看出,最优策略已经发生改变,(a) 的最优策略是进入禁区到达目标,而 (b) 的最优策略是绕一大圈到达目标,因为它衡量发现绕一大圈再到达目标获得的回报(return)比进入禁区到达目标所得到的回报(return)更大。最优策略变得目光短浅!避开所有禁区!
总结:
之所以这样是因为当 γ 比较大的时候,智能体比较远视,它会比较重视未来的 reward;当 γ 比较小的时候,智能体比较近视,return 里所得到的值的大小主要由近期所得到的 reward 来决定, γ 比较小它的幂次方就小,未来的 reward 会被打折的很厉害。
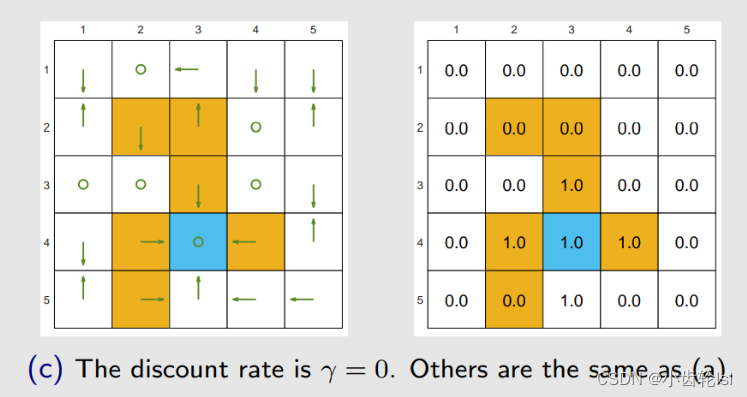
如果我们将 γ 改为 0。最优策略变得极其短视!同时,只选择即时奖励(immediate reward)最大的动作!从很多状态出发根本无法达到目标!
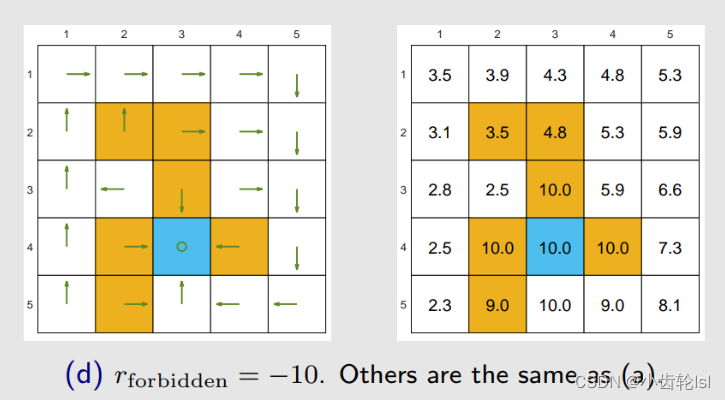
如果我们在进入禁区时加大惩罚力度(γ = 0.9) ,最优策略也绕开了禁区。
最优策略保持不变!因为重要的不是奖励(reward)的绝对值(absolute reward values)!而是它们的相对值(relative values)!
举例
毫无意义的绕行?
通过求解贝尔曼最优公式可以得到图 (a) 左图的最优策略(绿色箭头)和右图的最优状态值(optimal state value),(a) 中的策略是最优的,(b) 中的策略不是。
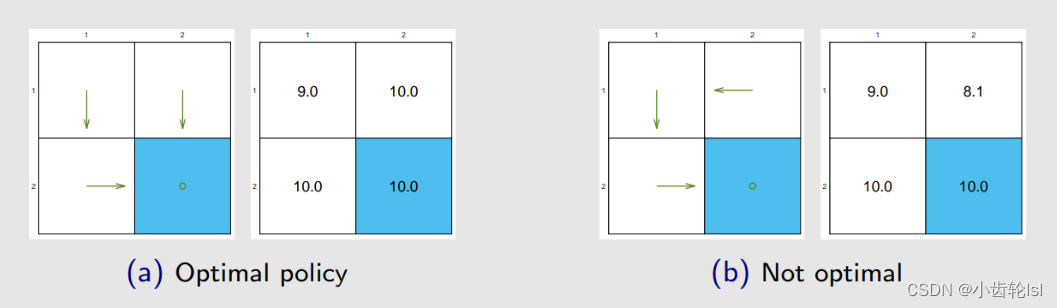
问题:为什么最优策略不是(b)?为什么最优策略不走毫无意义的弯路?我们定义从一个白色格子到另一个白色格子的 r=0,即走弯路不会受到惩罚。那么为什么最优策略不走毫无意义的弯路?
答案:因为折扣因子 γ
- 自己的理解就是随着这一次没有惩罚,但是随着尝试次数变多,discount rate<1,后边获得相应的奖励就会变少。

总结:
由上面的例子得到的启发:在设计 reward 的时候,很多人可能会觉得每走一步应该给一个惩罚 r=-1,r=-1 代表能量的消耗,这样它就不会绕远路,就会尽可能走最短的路径到达目标,如果 r=0,没有 r=-1 好像就会绕远路,其实不是这样的,因为除了 r 来约束它不要绕远路之外,还有 γ,因为越绕远路我们得到到达目标的奖励越晚,越晚那时候对应的 γ 的次方越小,奖励打折会很厉害,所有它自然会找一个最短的路径过去。
十、总结
有关贝尔曼最优方程的问题:
存在性:这个方程有解吗?
有,根据收缩映射定理
唯一性:这个方程的解是否唯一?
是,根据收缩映射定理(最优状态值 optimal state value 这个解是唯一的,但是对应 optimal state value 的最优策略 π 不一定是唯一的)
算法:如何求解这个方程,如何求解最优策略和最优解?
根据收缩映射定理提出的迭代算法
最优性:我们为什么要研究这个方程
因为贝尔曼最优公式的解对应于最优状态值(state value)和最优策略(opyimal policy)
最后,我们明白了研究BOE的重要性!

















 1931
1931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









