






参考文章
【RViz2】导入urdf模型时报错:Could not load resource xxx,Unable to open file xxx,Error retrieving file xxx
【Gazebo】ROS2加载URDF到Gazebo11
操作步骤
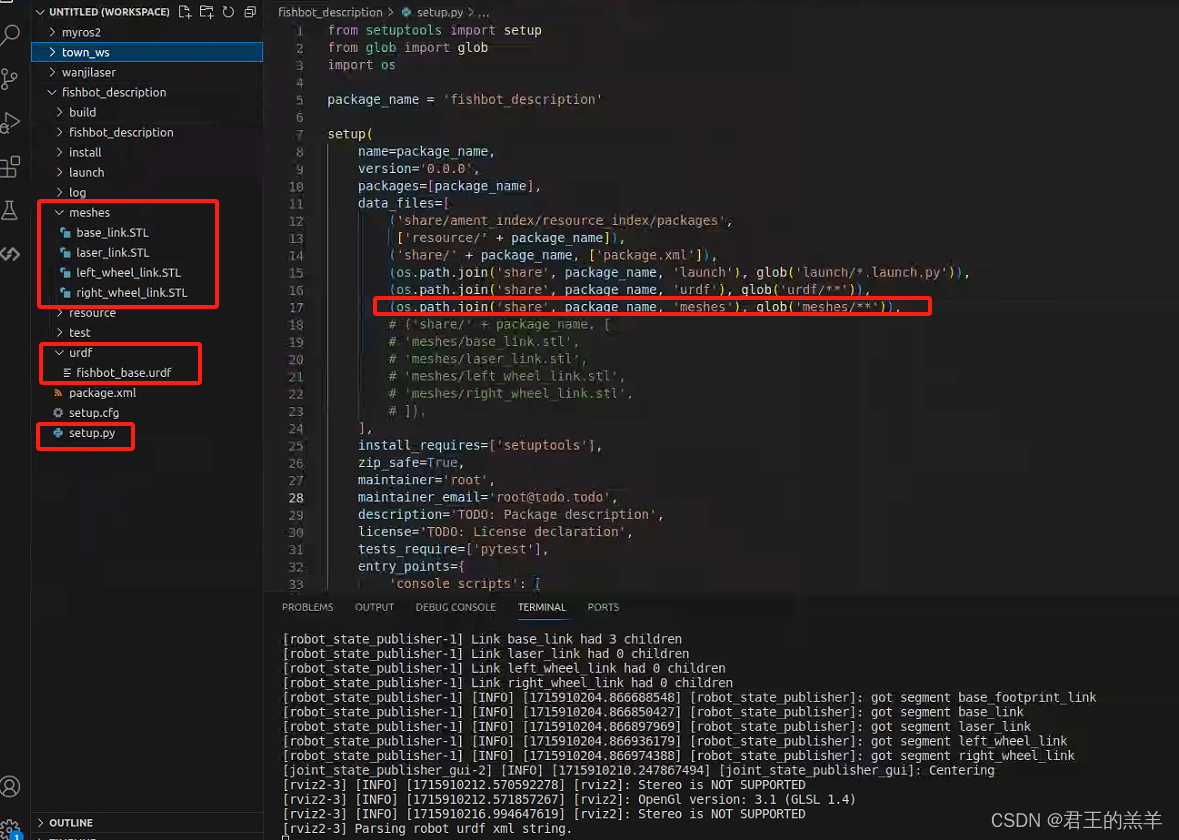
1、URDF 文件夹下放入urdf文件
2、meshes 文件夹下放入stl文件
3、修改setup文件,引入URDF和meshes目录下文件
实操验证
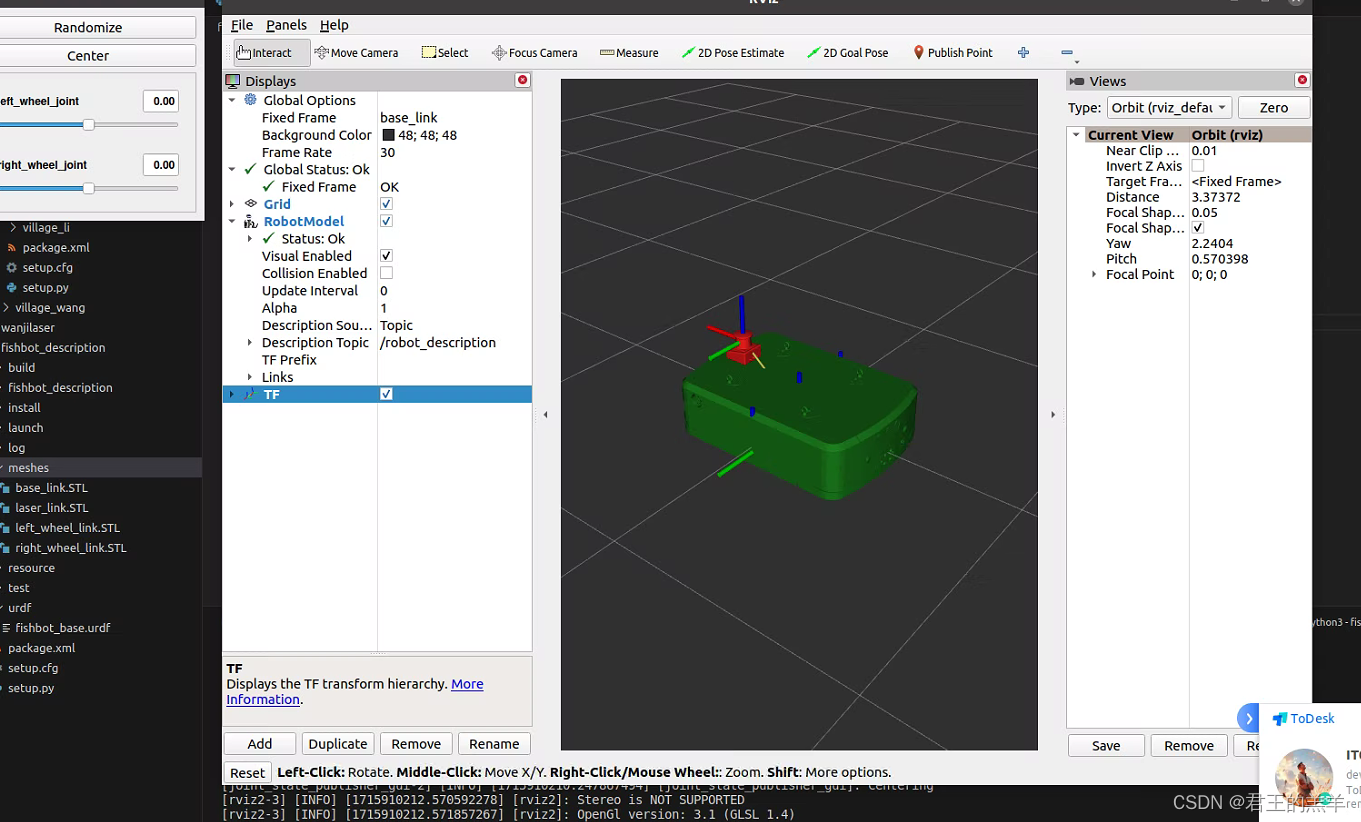
1、rviz2加载
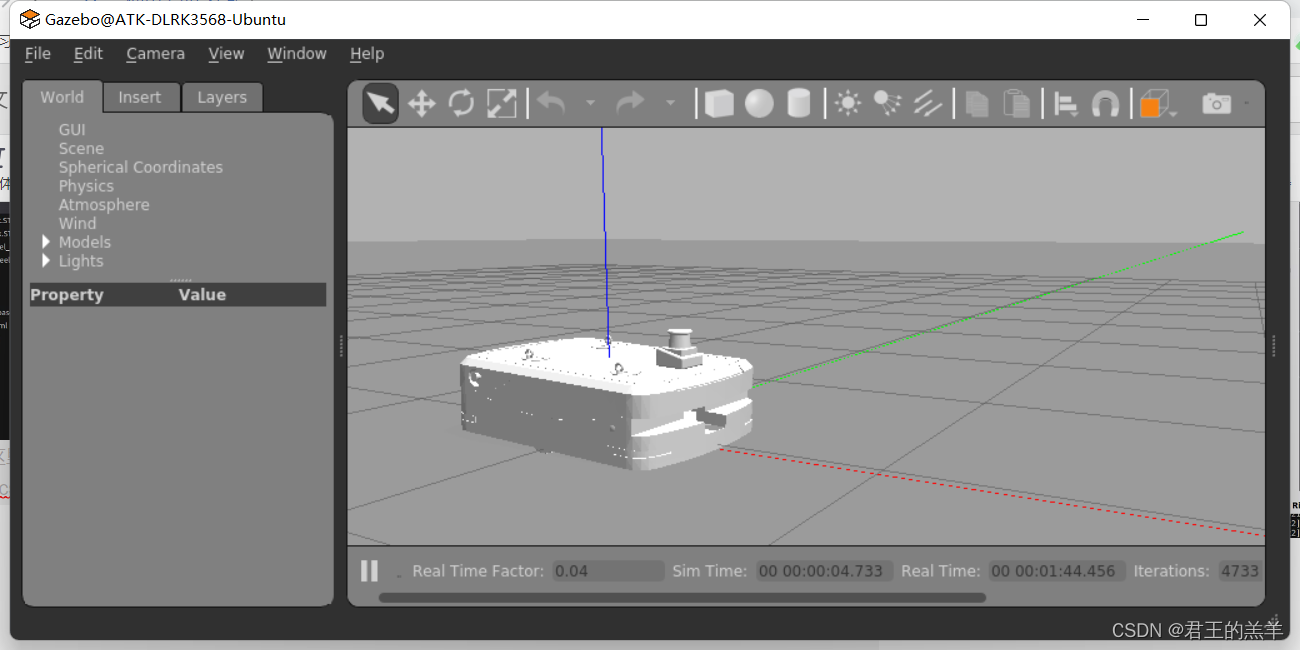
2、gazebo加载
遇到问题
rviz加载urdf模型报错,找不到stl文件
【已解决】修改setup文件,引入URDF和meshes目录下文件
gazebo加载urdf模型报错,找不到stl文件
【已解决】
1、用户目录下ctl+H显示隐藏文件,找到.gazebo文件夹,如无models文件夹则建立
2、将工作空间下的urdf及meshes文件拷贝到models目录下
【详情】[gazebo-1] [Wrn] [SystemPaths.cc:459] File or path does not exist [“”] [model://fishbot_description/meshes/laser_link.STL]
rviz中模型颜色显示正常,gazebo中显示白色(gazebo加载的模型没有颜色)
[Err] [InsertModelWidget.cc:403] Missing model.config for model
新建一个配置文件即可,忽略也可,不影响主要功能
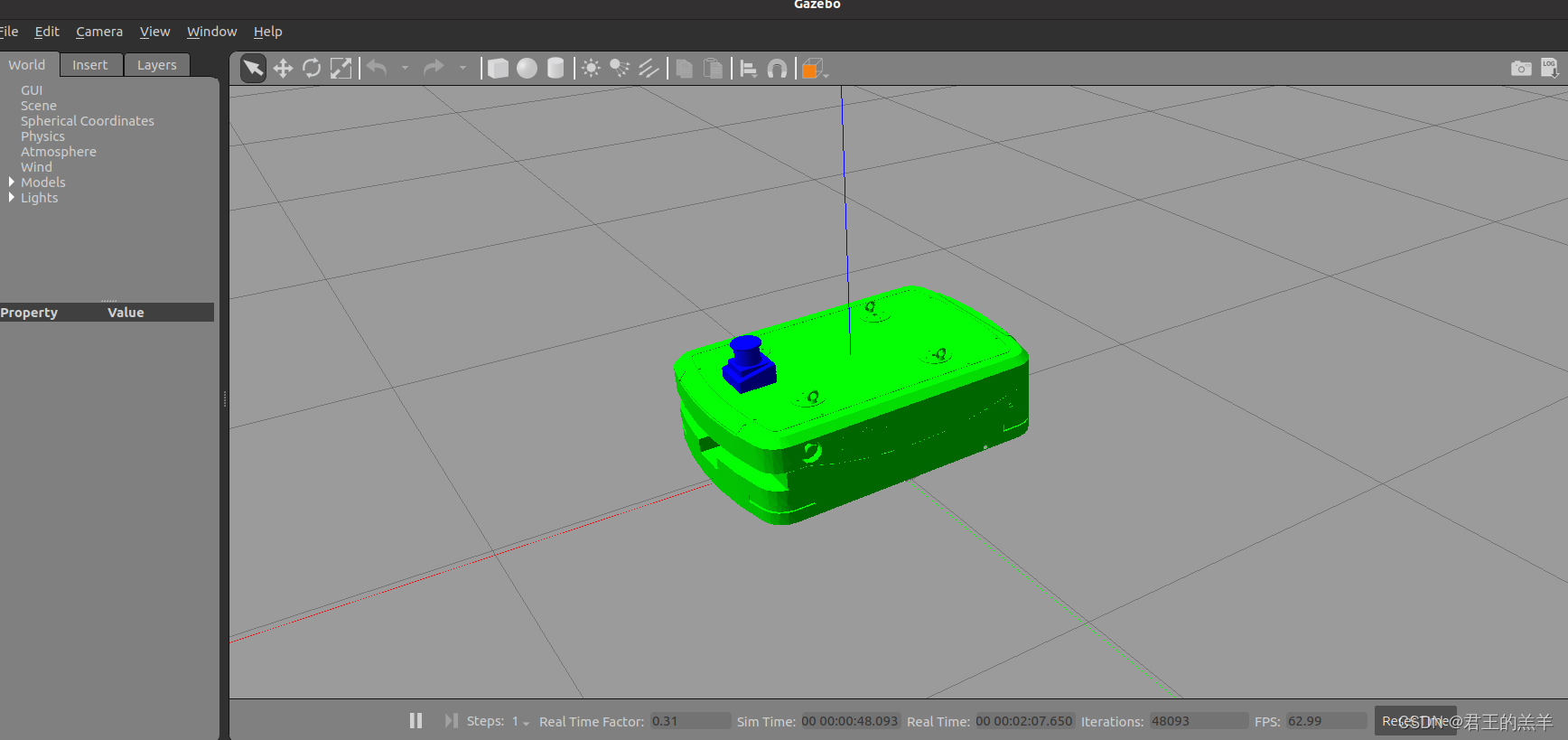
【已解决】
URDF中添加下面的代码,赋予材质
<gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo>















 1699
1699











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









