






车辆主动悬架平顺性控制
采用了能反映车辆垂向运动和俯仰运动的半车悬架模型。
建立了多种路面输入,包括生活中最常遇到的随机路面输入、凸块路面输入以及越野路面。
采用反步控制、模糊控制、PID控制进行主动悬架的平顺性控制。
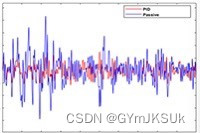
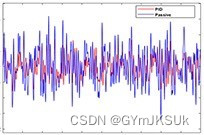
利用Simulink进行仿真,悬架垂向加速度、俯仰角加速度都有明显改善,结果良好。

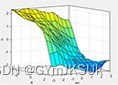
车辆主动悬架平顺性控制是现代汽车技术领域中一个重要的研究方向。主动悬架系统的设计旨在通过对车辆悬架系统进行智能控制,以减少车辆在行驶过程中的颠簸感,提高乘坐舒适性。为了实现这一目标,研究者采用了能准确反映车辆垂向运动和俯仰运动的半车悬架模型,并建立了多种路面输入模型,包括生活中最常遇到的随机路面输入、凸块路面输入以及越野路面。
在主动悬架平顺性控制方面,研究者尝试了多种控制方法,包括反步控制、模糊控制以及PID控制。这些控制方法都能对车辆悬架系统进行有效控制,以实现平滑的悬架运动。通过采用Simulink软件进行仿真,研究者发现,无论是悬架垂向加速度还是俯仰角加速度,在主动悬架平顺性控制的作用下,都有明显改善,这表明所采用的控制方法在提高车辆平顺性方面取得了良好的效果。
综上所述,车辆主动悬架平顺性控制是一个技术上具有挑战性的问题。通过建立半车悬架模型和多种路面输入模型,并采用反步控制、模糊控制以及PID控制等方法进行控制,可以有效地提高车辆平顺性。通过Simulink仿真的结果也验证了这些方法的有效性。值得一提的是,这项研究成果对于汽车制造商来说具有重要意义,可以为他们开发更加舒适的汽车悬架系统提供有益的参考。
需要注意的是,本文所提供的内容仅供参考,不得作为商业用途或者其他非研究目的使用。任何形式的转载或引用都需得到原作者的允许。同时,鉴于研究的特殊性,一经售出将不予退换,请购买者慎重考虑。若有任何问题或需进一步了解该项目报告,请另行联系。
(文章约800字)
相关代码,程序地址:http://imgcs.cn/lanzoun/757318797077.html















 1054
1054











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









