







零.说明:
本文的所有代码均可在 DML 找到,欢迎点星星。
注.CNN的这份代码非常慢,基本上没有实际使用的可能,所以我只是发出来,代表我还是实践过而已
一.引入:
CNN这个模型实在是有些年份了,最近随着深度学习的兴起又开始焕发青春了,把imagenet测试的准确度提高了非常多,一个是Alex的工作,然后最近好像Zeiler又有突破性的成果,可惜这些我都没看过,主要是imagenet的数据太大了,我根本没有可能跑得动,所以学习的积极性有些打折扣。不说那么多,还是先实现一个最基础的CNN再说吧:
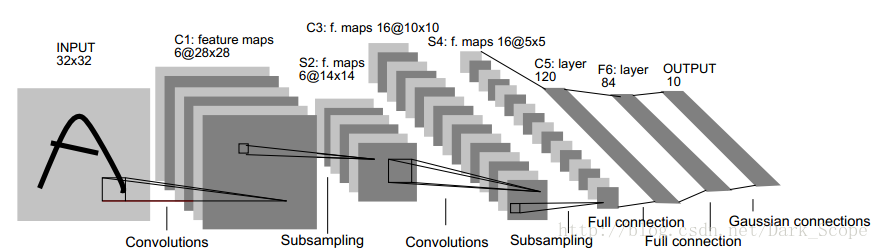
二.实现:
好吧,基本是根据DeepLearnToolbox的结构按照 Notes on Convolutional Neural Networks 来写的,大家可以先看这里的代码讲解:【面向代码】学习
Deep Learning(三)Convolution Neural Network(CNN)
本来是想根据Notes那篇文章来写的,只是最后发现如果给subsampling层加上sigmoid之后整个结构就不收敛了~~~,我用numeric_grad_check检测发现梯度计算也是对的,不明所以~~~这份代码我也上传了(old),不过下面的代码最后就只能改成稍简化版的,貌似通常情况下CNN的pooling(subsampling)层也是没有sigmoid的,先这样吧,这个东西理解起来简单还是写了我两个下午……伤……
代码:
DML/CNN/cnn.py
from __future__ import division
import numpy as np
import scipy as sp
from scipy.signal import convolve as conv
from dml.tool import sigmoid,expand,showimage
from numpy import rot90
'''
this algorithm have refered to the DeepLearnToolBox(https://github.com/rasmusbergpalm/DeepLearnToolbox)
also:[1]:"Notes on Convolutional Neural Networks" Jake Bouvrie 2006 - How to implement CNNs
I want to implement as [1] described,where the subsampling layer have sigmoid function
but finally it does not converge,but I can pass the gradcheck!!
(this version is dml/CNN/cnn.py.old ,if you can figure out what is wrong in the code,PLEASE LET ME KNOW)
at last I changed code back to simple version,delete the sigmoid in 's' layer
ps:this code in python is too slow!don't use it do anything except reading.
'''
class LayerC:
def __init__(self,types='i',out=0,scale=0,kernelsize=0):
self.types=types
self.a=None
self.b=None
self.d=None
if (types=='i'):
pass
elif (types=='c'):
self.out=out
self.kernelsize=kernelsize
self.k=None
elif (types=='s'):
self.scale=scale
self.Beta={}
self.dBeta={}
class CNNC:
def __init__(self,X,y,layers,opts):
self.X=np.array(X)
self.y=np.array(y)
self.layers=layers
self.opts=opts
inputmap = 1
mapsize = np.array(self.X[0].shape)
for i in range(len(self.layers)):
if self.layers[i].types=='s':
mapsize = mapsize / self.layers[i].scale
assert np.sum(np.floor(mapsize)== mapsize)==mapsize.size
self.layers[i].b={}
self.layers[i].db={}
for j in range(inputmap):
self.layers[i].b.setdefault(j,0)
self.layers[i].db.setdefault(j,0)
self.layers[i].Beta.setdefault(j,1)
self.layers[i].dBeta.setdefault(j,0.0)
pass
if self.layers[i].types=='c':
mapsize = mapsize - self.layers[i].kernelsize + 1
fan_out = self.layers[i].out*self.layers[i].kernelsize**2
self.layers[i].k={}
self.layers[i].dk={}
self.layers[i].b={}
self.layers[i].db={}
for j in range(self.layers[i].out):
fan_in = inputmap*self.layers[i].kernelsize**2
for t in range(inputmap):
self.layers[i].k.setdefault(t,{})
self.layers[i].k[t].setdefault(j)
self.layers[i].k[t][j]=(np.random.rand(self.layers[i].kernelsize,self.layers[i].kernelsize)-
0.5)*2*np.sqrt(6/(fan_out+fan_in))
self.layers[i].dk.setdefault(t,{})
self.layers[i].dk[t].setdefault(j)
self.layers[i].dk[t][j]=np.zeros(self.layers[i].k[t][j].shape)
self.layers[i].b.setdefault(j,0)
self.layers[i].db.setdefault(j,0)
inputmap=self.layers[i].out
if self.layers[i].types=='i':
pass
fvnum = np.prod(mapsize)*inputmap;
onum = self.y.shape[0];
self.ffb=np.zeros((onum,1))
self.ffW=(np.random.rand(onum, fvnum)-0.5)*2*np.sqrt(6/(onum+fvnum))
def cnnff(self,x):
#print x
self.layers[0].a={}
self.layers[0].a.setdefault(0)
self.layers[0].a[0]=x.copy()
inputmap=1
n=len(self.layers)
for l in range(1,n):
if self.layers[l].types=='s':
for j in range(inputmap):
temp=np.ones((self.layers[l].scale,self.layers[l].scale))/(self.layers[l].scale**2)
z=conv(self.layers[l-1].a[j],np.array([temp]), 'valid')
z=np.array(z)[:,::self.layers[l].scale,::self.layers[l].scale]
if self.layers[l].a==None:
self.layers[l].a={}
self.layers[l].a.setdefault(j)
self.layers[l].a[j] =z
if self.layers[l].types=='c':
if self.layers[l].a==None:
self.layers[l].a={}
for j in range(self.layers[l].out): #for each outmaps
z = np.zeros(self.layers[l-1].a[0].shape - np.array([0,self.layers[l].kernelsize-1,self.layers[l].kernelsize-1]))
for i in range(inputmap): #cumulate from inputmaps
z+=conv(self.layers[l-1].a[i],np.array([self.layers[l].k[i][j]]),'valid')
self.layers[l].a.setdefault(j)
self.layers[l].a[j]=sigmoid(z+self.layers[l].b[j])
inputmap = self.layers[l].out
self.fv=None
for j in range(len(self.layers[n-1].a)):
sa=self.layers[n-1].a[j].shape
p=self.layers[n-1].a[j].reshape(sa[0],sa[1]*sa[2]).copy()
if (self.fv==None):
self.fv=p
else:
self.fv=np.concatenate((self.fv,p),axis=1)
self.fv=self.fv.transpose()
self.o=sigmoid(np.dot(self.ffW,self.fv) + self.ffb)
def cnnbp(self,y):
n=len(self.layers)
self.e=self.o-y
self.L=0.5*np.sum(self.e**2)/self.e.shape[1]
self.od=self.e*(self.o*(1-self.o))
self.fvd=np.dot(self.ffW.transpose(),self.od)
if self.layers[n-1].types=='c':
self.fvd=self.fvd*(self.fv*(1-self.fv))
sa=self.layers[n-1].a[0].shape
fvnum=sa[1]*sa[2]
for j in range(len(self.layers[n-1].a)):
if self.layers[n-1].d==None:
self.layers[n-1].d={}
self.layers[n-1].d.setdefault(j)
self.layers[n-1].d[j]=self.fvd[(j*fvnum):((j+1)*fvnum),:].transpose().reshape(sa[0],sa[1],sa[2])
for l in range(n-2,-1,-1):
if self.layers[l].types=='c':
for j in range(len(self.layers[l].a)):
if self.layers[l].d==None:
self.layers[l].d={}
self.layers[l].d.setdefault(j)
self.layers[l].d[j]=self.layers[l].a[j]*(1-self.layers[l].a[j])*
np.kron(self.layers[l+1].d[j],np.ones(( self.layers[l+1].scale,self.layers[l+1].scale))/(self.layers[l+1].scale**2))
elif self.layers[l].types=='s':
for j in range(len(self.layers[l].a)):
if self.layers[l].d==None:
self.layers[l].d={}
self.layers[l].d.setdefault(j)
z=np.zeros(self.layers[l].a[0].shape)
for i in range(len(self.layers[l+1].a)):
rotated=np.array([rot90(self.layers[l+1].k[j][i],2)])
z=z+conv(self.layers[l+1].d[i],rotated,'full')
self.layers[l].d[j]=z
for l in range(1,n):
m=self.layers[l].d[0].shape[0]
if self.layers[l].types=='c':
for j in range(len(self.layers[l].a)):
for i in range(len(self.layers[l-1].a)):
#self.layers[l].dk[i][j]=rot90(conv(self.layers[l-1].a[i],rot90(self.layers[l].d[j],2),'valid'),2)
self.layers[l].dk[i][j]=self.layers[l].dk[i][j]*0
for t in range(self.layers[l].d[0].shape[0]):
self.layers[l].dk[i][j]+=rot90(conv(self.layers[l-1].a[i][t],rot90(self.layers[l].d[j][t],2),'valid'),2)
self.layers[l].dk[i][j]=self.layers[l].dk[i][j]/m
self.layers[l].db[j]=np.sum(self.layers[l].d[j])/m
self.dffW=np.dot(self.od,self.fv.transpose())/self.od.shape[1]
self.dffb = np.mean(self.od,1).reshape(self.ffb.shape);
def cnnapplygrads(self,alpha=0.1):
n=len(self.layers)
for l in range(1,n):
if self.layers[l].types=='c':
for j in range(len(self.layers[l].a)):
for i in range(len(self.layers[l-1].a)):
self.layers[l].k[i][j]-=alpha*self.layers[l].dk[i][j]
self.layers[l].b[j]-=alpha*self.layers[l].db[j]
pass
self.ffW-=alpha*self.dffW
self.ffb-=alpha*self.dffb
def train(self):
m=self.X.shape[0]
batchsize=self.opts['batchsize']
numbatches = m/batchsize
print numbatches
self.rL = []
for i in range(self.opts['numepochs']):
print 'the %d -th epoch is running'% (i+1)
kk=np.random.permutation(m)
for j in range(numbatches):
print 'the %d -th batch is running , totally %d batchs'% ((j+1),numbatches)
batch_x=self.X[kk[(j)*batchsize:(j+1)*batchsize],:,:].copy()
batch_y=self.y[:,kk[(j)*batchsize:(j+1)*batchsize]].copy()
self.cnnff(batch_x)
self.cnnbp(batch_y)
self.cnnapplygrads(alpha=self.opts['alpha'])
if len(self.rL)==0:
self.rL.append(self.L)
else:
p=self.rL[len(self.rL)-1]
self.rL.append(p*0.99+0.1*self.L)
print self.L
def gradcheck(self,test_x,test_y):
#github上有这部分代码
def test(self,test_x,test_y):
self.cnnff(np.array(test_x))
p=self.o.argmax(axis=0)
bad= np.sum(p!=np.array(test_y).argmax(axis=0))
print p,np.array(test_y).argmax(axis=0)
print bad
print np.array(test_y).shape[1]
er=bad/np.array(test_y).shape[1]
print er
def pred(self,test_x):
self.cnnff(np.array(test_x))
p=self.o.argmax(axis=0)
return p三.测试
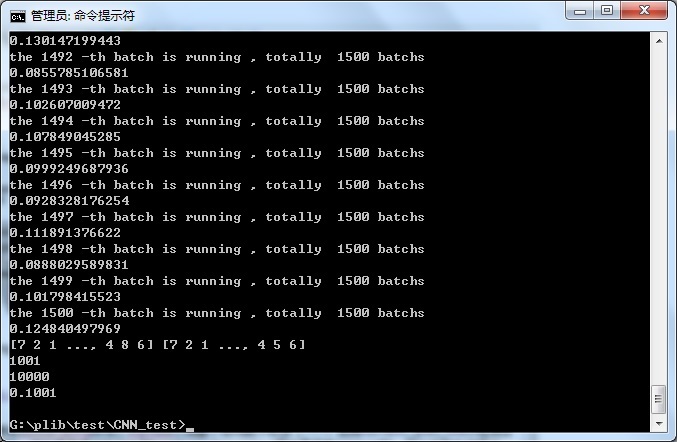
因为python跑这个实在是太慢了,主要原因我觉得是convolution函数(我用的scipy.signal.convolve)比matlab里慢太多了,所以跑MNIST以50为一个patch跑SGD一轮要二三十分钟,所以建议不要使用这份代码,你可以去用DeepLearnToolbox比这都快……
使用代码来测试:test/CNN_test/test_cnn.py
layers=[LayerC('i'),
LayerC('c',out=6,kernelsize=5),
LayerC('s',scale=2),
LayerC('c',out=12,kernelsize=5),
LayerC('s',scale=2)]
opts={}
opts['batchsize']=40
opts['numepochs']=1
opts['alpha']=1
a=CNNC(X,groundTruth,layers,opts)
#a.gradcheck(test_x[1:3,:,:],test_groundTruth[:,1:3])
a.train()
a.test(test_x,test_groundTruth)
这是一轮的结果,89.99%的准确度,应该还是正常的:
from: http://arc9.riaos.com/?p=6350















 583
583

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









