






微分器作为经典的控制环节具有广泛的应用,然而经典微分环节面临着容易受到噪声干扰,在数字系统中出现高频颤振等问题,面向高精度运动控制的应用,需要针对微分器进行分析和优化。
由于实际实验设备采用Speedgoat,控制框架采用定步长Simulink搭建,故本文采用Matlab结合Simulink进行仿真分析,采样频率5kHz。
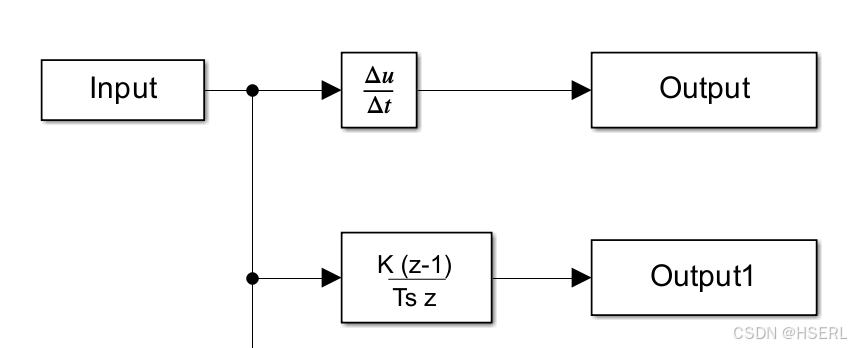
在Simulink中有两种典型的微分器结构,分别是连续库中的微分器和离散库中的微分器
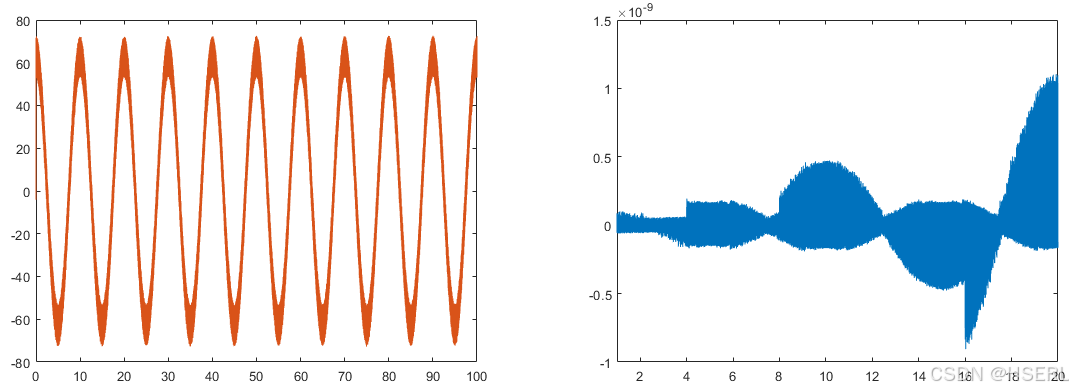
 采用设定的正弦叠加白噪声输入信号经过两种微分器,对比输出结果,左图为微分信号时域结果,右图为两者的差值,从数量级上看,可以认为这两种微分器在本场景下几乎一致
采用设定的正弦叠加白噪声输入信号经过两种微分器,对比输出结果,左图为微分信号时域结果,右图为两者的差值,从数量级上看,可以认为这两种微分器在本场景下几乎一致
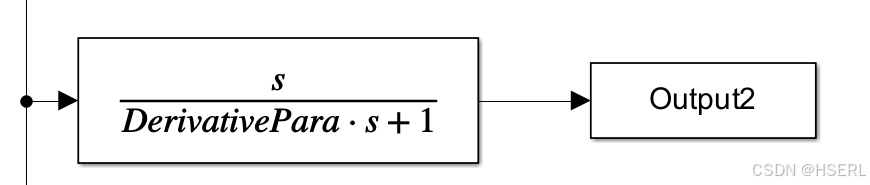
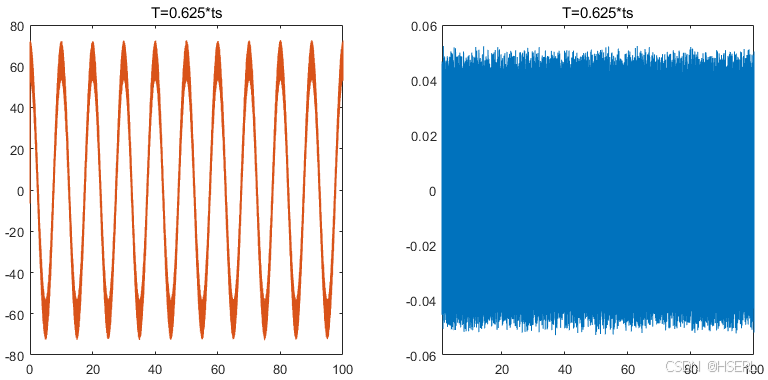
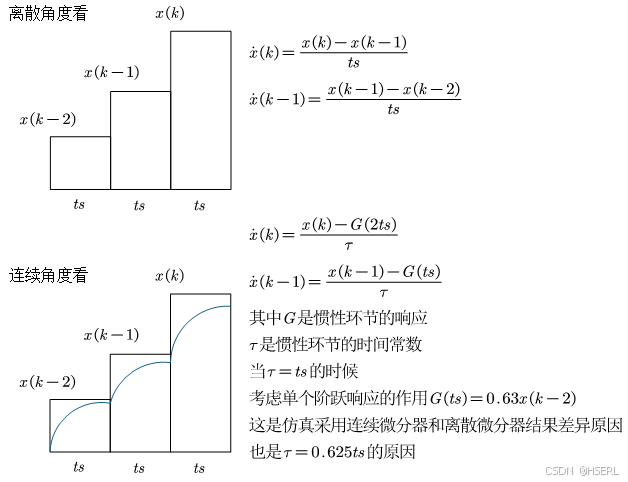
进一步的针对集成为微分模块进行分析,在经典调节理论中,对给定信号的微分信号采用如下微分环节得到,式子中的T是比较小的时间常数,其也可以定义为在阶跃响应下,系统输出达到0.63时对应的时间
理论上来讲,当T越小的时候,该环节越接近于理想的微分计算,然而由于数字系统的采样频率受限,实际系统的输入输出都是离散量,当T远小于采样周期的时候,其完全能够模拟微分器的作用,故经典理论采用该环节表征微分器。
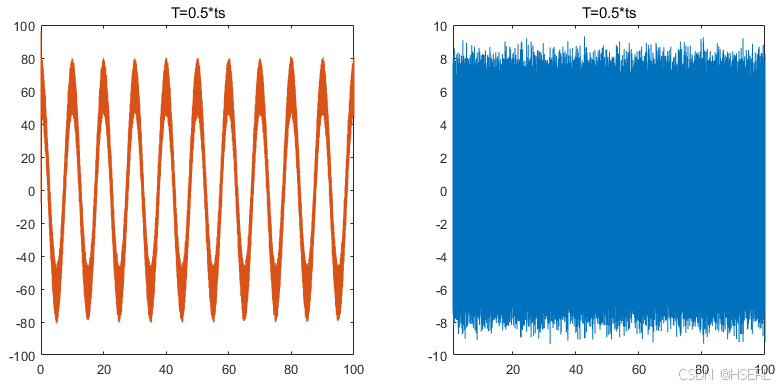
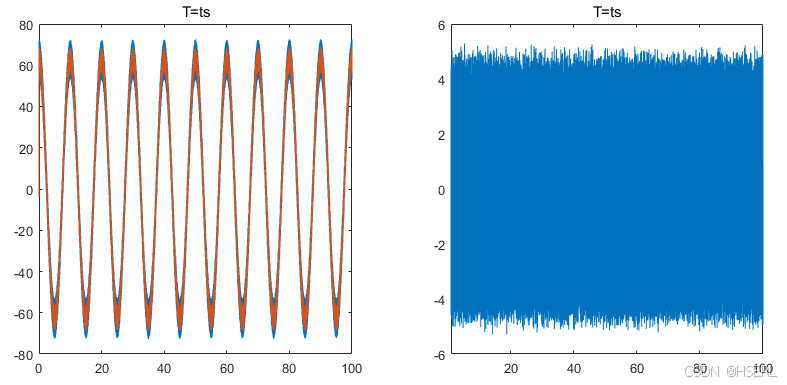
然而过小的T会导致噪声被显著放大,在实际应用中该如何根据采样周期选择T,从而平衡噪声放大和微分器效果需要经验调试。对比不同T下的微分信号输出与上述集成模块的输出,当T=0.625ts的情况下,采用该微分环节的结果与集成模块具有最近似的输出。
站在离散的视角看微分计算,可以简单的将微分计算离散化得到
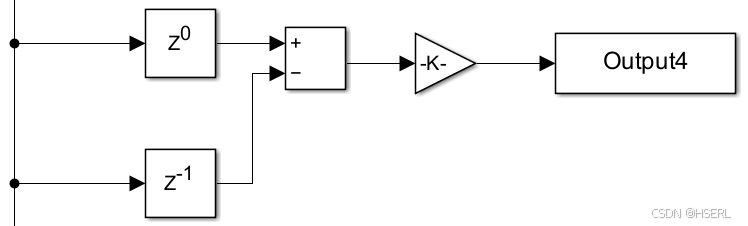
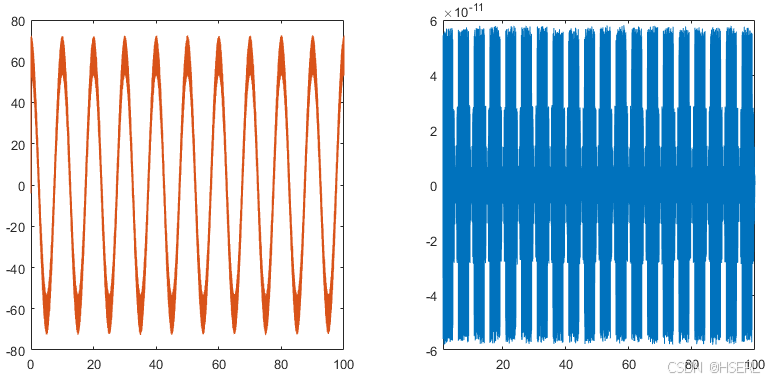
从误差量级看,采用该方法得到的微分信号与集成模块具有更高的相似度,也进一步说明了集成的两种微分器均表现为经典微分器的形式,也面临着经典微分器的问题。

















 9230
9230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









