






四旋翼无人机uav,轨迹跟踪pd控制器,matlab-simulink仿真学习资料,附参考文献
ID:945722517292483
慢慢摸索的猪
四旋翼无人机(Unmanned Aerial Vehicle, UAV)作为一种先进的航空器,已经被广泛应用于军事侦察、物流配送、农业监测等领域。在实际飞行中,无人机的轨迹跟踪控制算法起着至关重要的作用,能够实现无人机按照预定的轨迹进行飞行,从而满足任务需求。而PD控制器则是一种经典的控制算法,具有简单高效、易于实现的特点。本文旨在通过Matlab-Simulink仿真学习资料,对四旋翼无人机轨迹跟踪PD控制器进行深入研究和分析。
首先,我们将介绍四旋翼无人机的基本结构和工作原理。四旋翼无人机由四个电机和相应的螺旋桨组成,通过电机的转速控制来实现飞行动作。在飞行过程中,无人机通过传感器获取环境信息,并通过飞控系统对电机进行控制,从而实现精确的姿态调整和飞行控制。
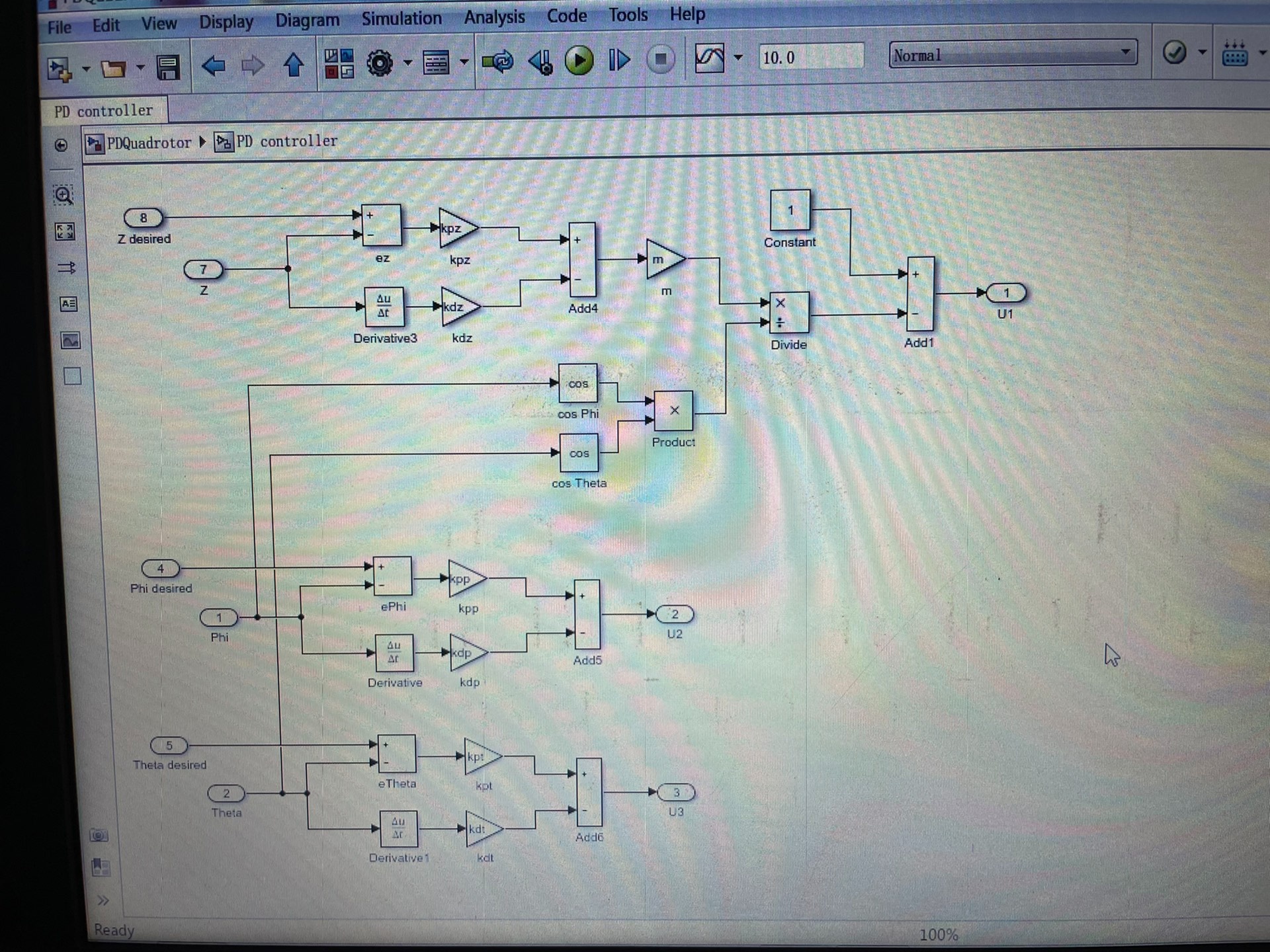
接着,我们将详细介绍轨迹跟踪控制算法中的PD控制器。PD控制器是一种基于误差信号的比例和微分控制算法,通过对误差信号的加权处理,实现对系统的稳定性和动态响应的调节。在四旋翼无人机的轨迹跟踪控制中,PD控制器可以根据飞行任务的需求,对无人机的位置和姿态进行精确调整,使其按照预定的轨迹进行飞行。
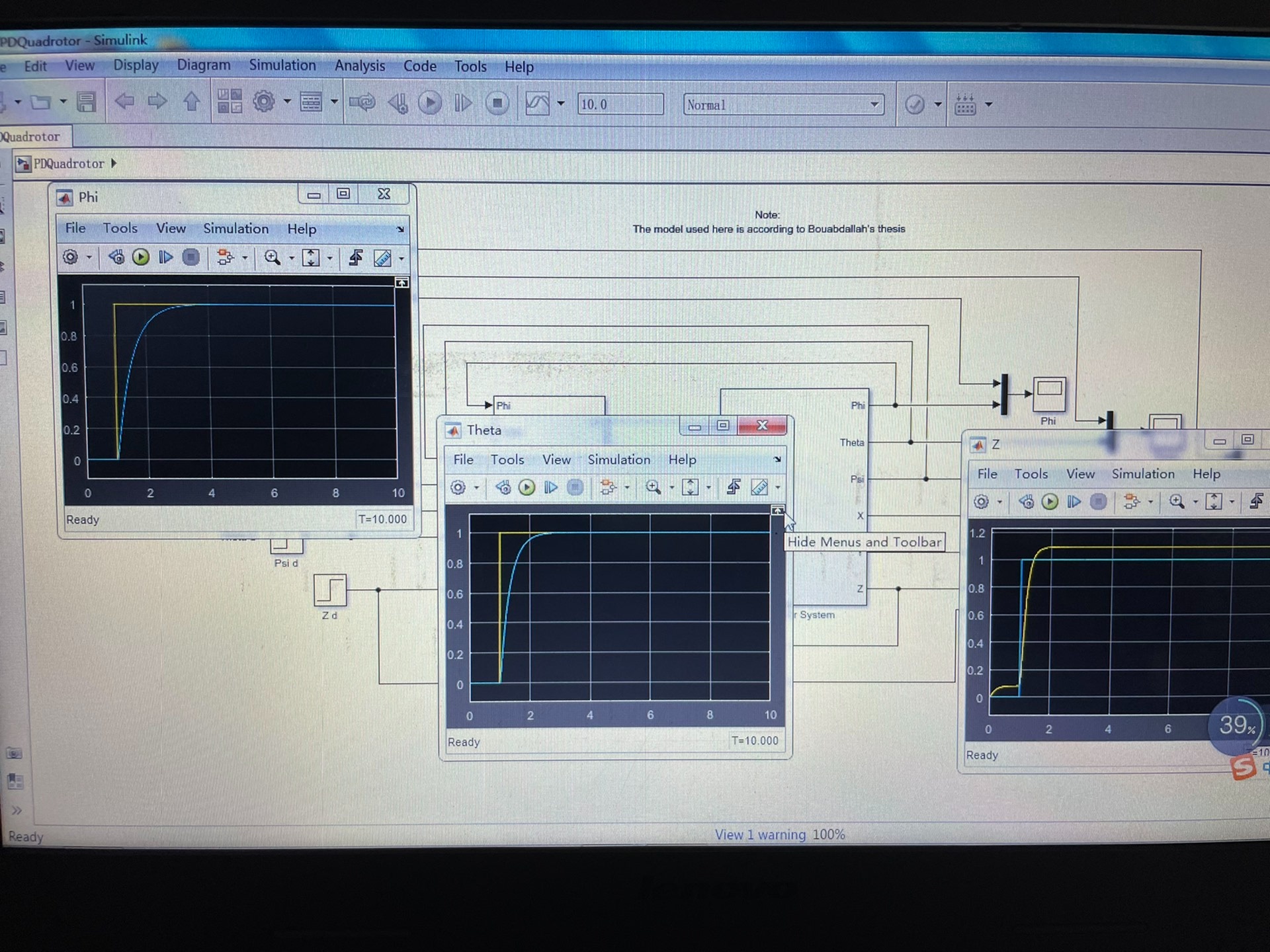
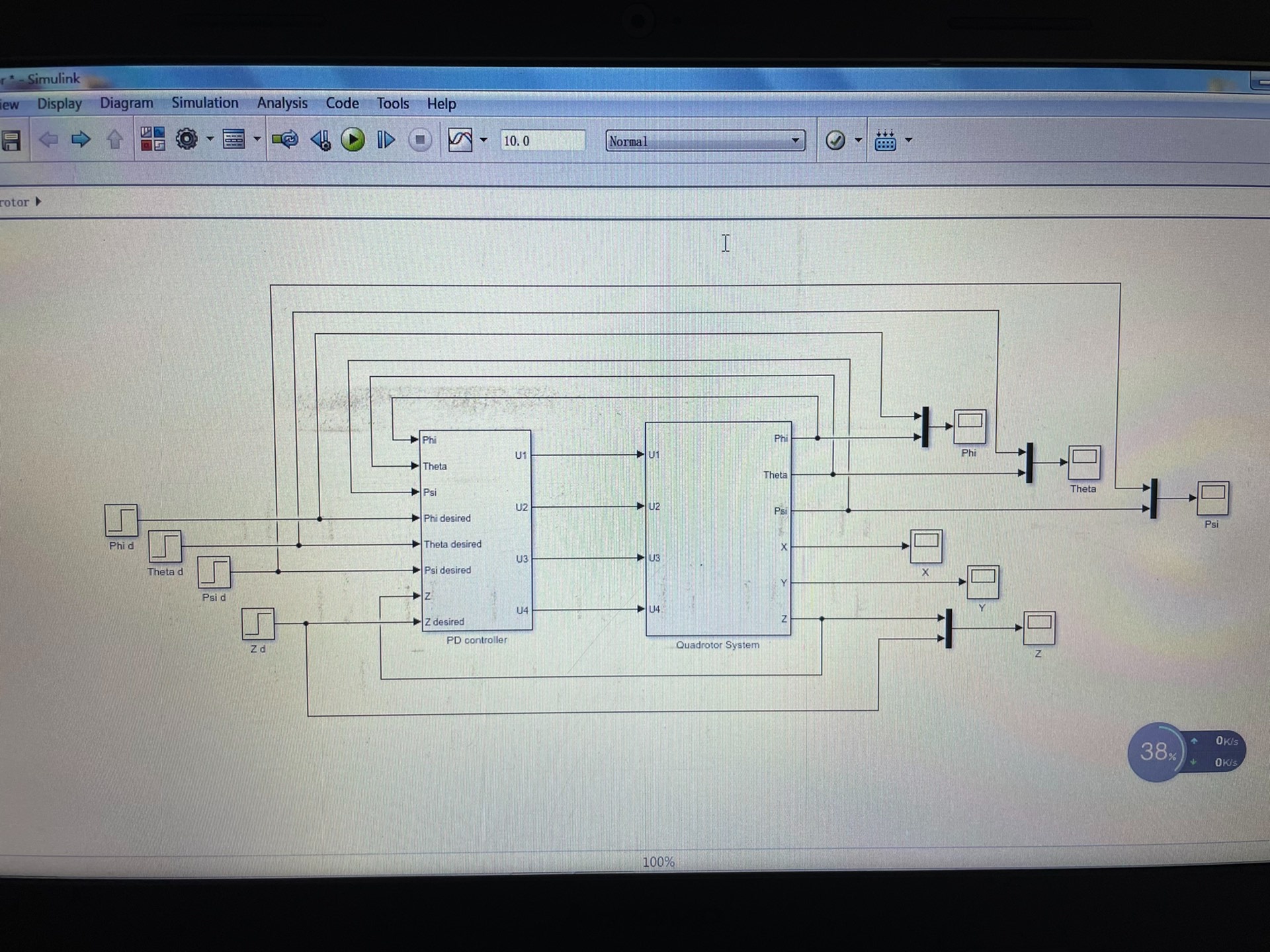
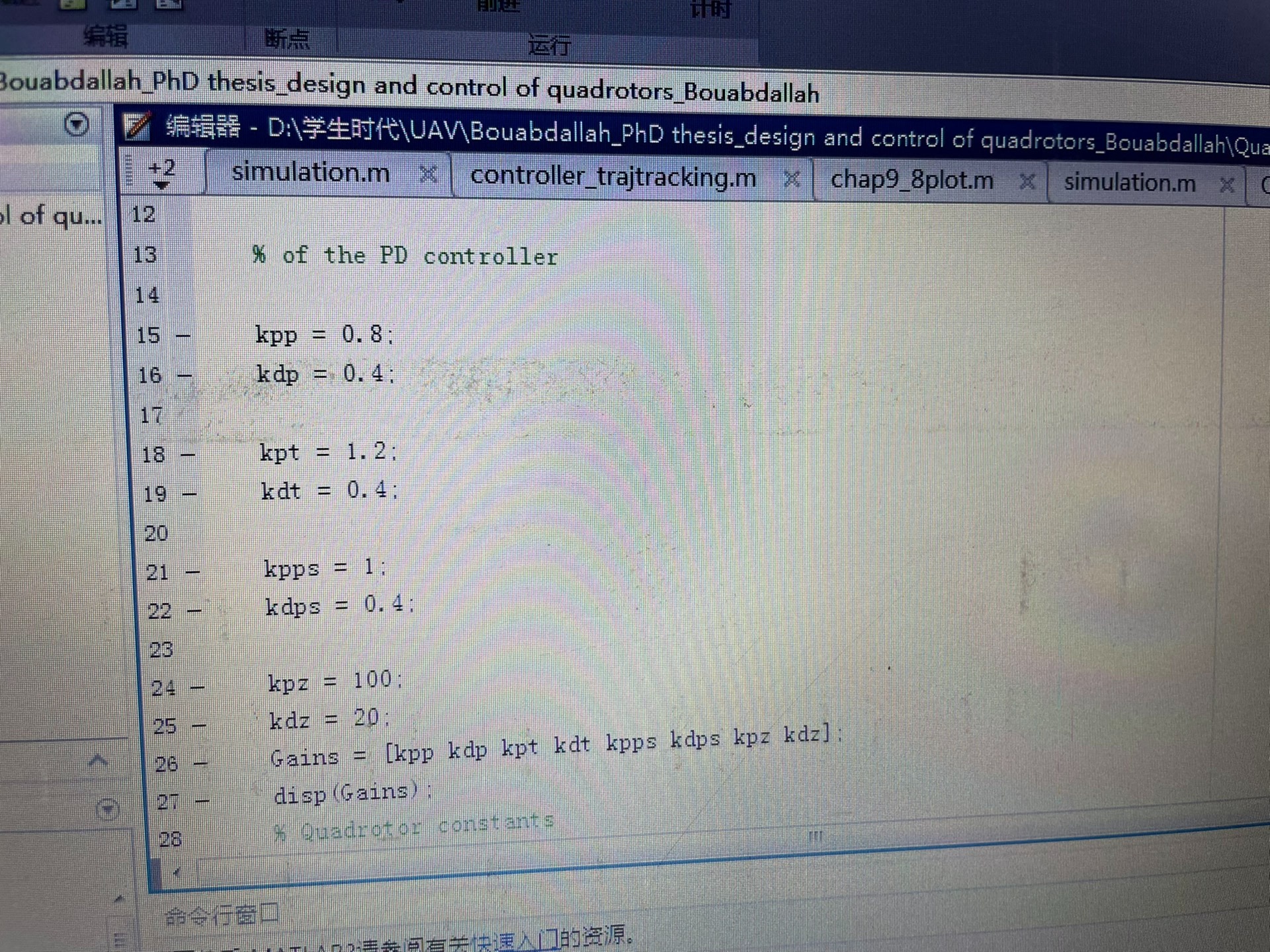
在研究过程中,我们将使用Matlab-Simulink仿真平台进行四旋翼无人机轨迹跟踪PD控制器的实验验证。通过建立包括无人机模型、环境模型和控制器模型的仿真模型,可以模拟出真实飞行中的各种情况,并通过仿真结果对PD控制器的性能进行评估和优化。同时,我们还将根据仿真结果,对PD控制器的参数进行调整和优化,以提高无人机的轨迹跟踪性能。
最后,我们将总结本文的研究内容和结论。通过对四旋翼无人机轨迹跟踪PD控制器的研究,我们可以深入了解无人机控制算法的原理和实现方法,为进一步提高无人机的飞行性能提供重要参考。同时,本文所提供的Matlab-Simulink仿真学习资料也为学习者提供了一个实践和探索的平台,有助于加深对飞行控制算法的理解和应用。
综上所述,本文围绕四旋翼无人机轨迹跟踪PD控制器展开了深入研究和分析。通过Matlab-Simulink仿真学习资料的实验验证,我们可以更好地理解和应用PD控制器算法,提高无人机的轨迹跟踪性能。本文不仅提供了专业的技术分析,还为读者提供了一个实践和学习的平台,有助于进一步推动无人机技术的发展和应用。
(文章字数:447)
【相关代码,程序地址】:http://fansik.cn/722517292483.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









