






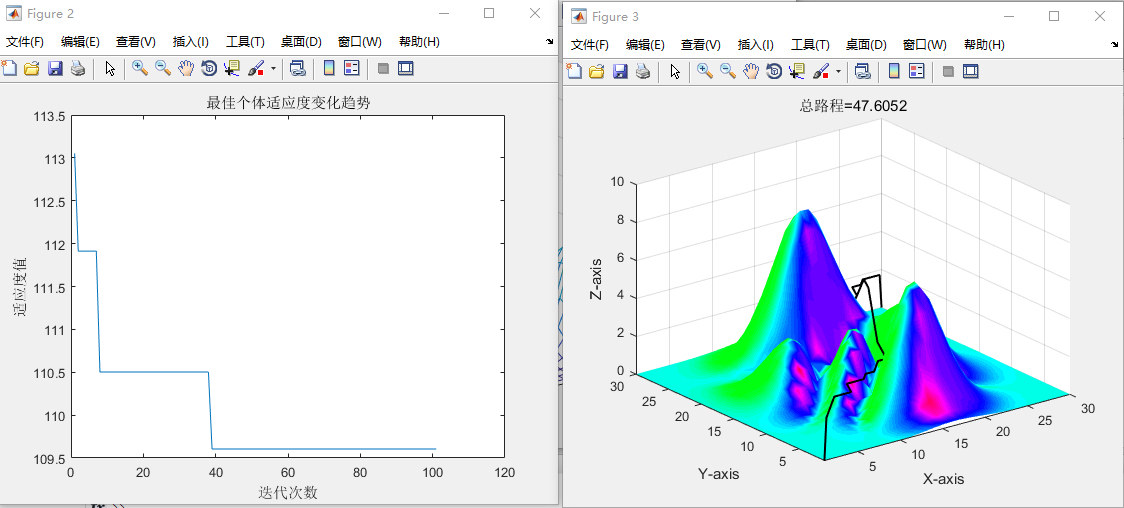
Matlab算法仿真,单无人机三维地图路径规划。
使用的算法是蚁群算法,加入了无人机自身的约束条件如飞行高度,水平偏转角,垂直偏转角等,仿真结果更稳定,更优!
注:只保证结果跟下图一致,不对代码解释教学,代码里面有部分解释!
ID:5126675743405961
甜城欢乐的蛋黄
Matlab算法仿真,单无人机三维地图路径规划
在无人机技术的快速发展和广泛应用的背景下,路径规划是无人机应用的核心问题之一。无人机的路径规划不仅需要满足飞行的起点和终点,还要考虑到避免障碍物、飞行高度、水平偏转角、垂直偏转角等约束条件,以实现安全、高效、稳定的飞行。本文将介绍一种基于蚁群算法的无人机路径规划算法,并在Matlab环境下进行算法仿真,以验证其稳定和优越性。
无人机路径规划的本质是在给定的环境中找到一条最优路径,使得无人机能够从起点飞行到终点,并且避开可能的障碍物。蚁群算法是一种基于模拟蚂蚁群体行为的启发式算法,通过模拟蚂蚁在寻找食物过程中的信息素释放和通信行为,对路径进行搜索和优化。在本文中,我们将使用蚁群算法来解决无人机路径规划问题。
首先,我们需要构建无人机的环境模型。在模型中,包括起点、终点和可能的障碍物。为了简化问题,我们将环境建模为一个三维地图,并假设无人机的飞行高度、水平偏转角和垂直偏转角有一定的限制。这些约束条件将在路径规划过程中被考虑进去,以确保飞行的安全性和稳定性。
接下来,我们需要定义蚂蚁在路径规划过程中的行为和决策规则。蚂蚁通过释放信息素来进行通信,并根据信息素浓度和周围环境的信息选择下一个飞行方向。在路径规划的过程中,蚂蚁将通过多次迭代来寻找最优路径,并不断更新信息素的浓度。通过这种方式,蚂蚁群体能够快速收敛于最优路径,并且能够适应环境的变化。
在进行仿真实验前,我们需要定义一些评价指标来评估路径规划算法的性能。常用的评价指标包括路径长度、运行时间和飞行稳定性等。通过对比不同算法的评价指标,我们可以选择最优的路径规划算法,并将其应用于实际的无人机飞行中。
在实验过程中,我们使用Matlab编程环境来进行算法的仿真。Matlab具有强大的数值计算和仿真功能,可以方便地实现路径规划算法,并可视化显示飞行路径和飞行环境。通过仿真实验,我们可以直观地观察无人机的飞行路径和各项约束条件的满足情况,进一步验证算法的稳定性和优越性。
通过以上的算法仿真实验,我们可以得出以下结论:基于蚁群算法的无人机路径规划算法能够稳定地找到一条最优路径,使得无人机能够从起点飞行到终点,并且避开可能的障碍物。这种算法能够灵活地适应不同的约束条件,并且具有较好的性能指标。在实际的无人机应用中,我们可以将该算法应用于无人机的飞行规划,以实现安全、高效、稳定的飞行。
综上所述,本文介绍了一种基于蚁群算法的无人机路径规划算法,并在Matlab环境下进行了仿真实验。通过仿真实验,我们验证了该算法的稳定性和优越性,并得出了相应的结论。在实际的无人机应用中,该算法可以有效地指导无人机的飞行路径规划,提高无人机的飞行效率和安全性。希望本文对读者在无人机路径规划算法的研究和应用中有所帮助。
注意:本文只保证结果与下图一致,不对代码解释教学,代码中有部分解释。
以上相关代码,程序地址:http://wekup.cn/675743405961.html















 300
300











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









