







转载:http://blog.csdn.net/jin_syuct/article/details/49785541

今天我们和大家分享的是四元数的插值。这里的插值指的是球面线性插值。例如,我们要模拟一下地球绕着太阳,从P1到P2。这中间的每一个位置都要用球面线性插值来做。
首先我们聊一聊线性插值:
x=x1-x2,t是插值系数,则lerp(x1,x2,t)=x1+t*x表示x1到x2的插值。
四元数的插值
q=(p-1)*p1,插值系数为t,则p到p1的插值为:slerp(p,p1,t)=p*((p-1)p1)t,表示p的逆乘以p1,他们乘积的t次方,乘以p
但是上面的公式在编程的时候用的挺麻烦的,所以我们使用下面的公式:
旋转插值,想开头所说的,这里说的插值是球面插值,是在3D空间中旋转的,因此我们可以将它等价于旋转插值。
例如:向量V1,V0
W=v1-v0
vt=v0+tw
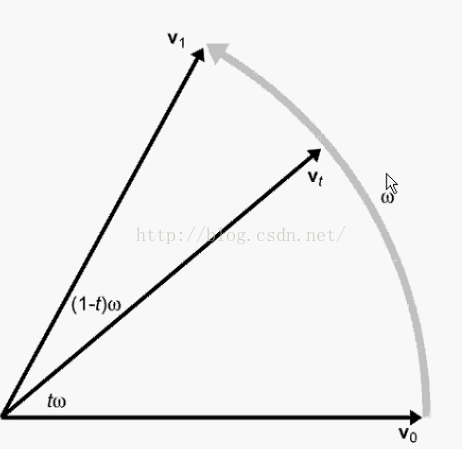
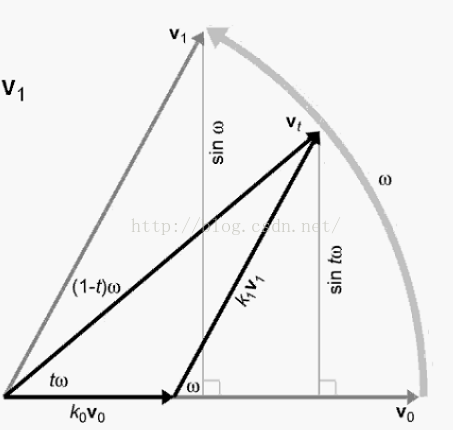
通过上图可知,VT=K0V0+K1V1.在这里,V1,V0,VT都是单位向量,V1和K1V1平行。
因此,我们可以求得sinw=sintw/k1,则k1=sintw/sinw,同样可得 k0=sin(1-t)w/sinw.
所以代入VT,就可以求出VT了。

四元数也是一个道理,注意slerp这个函数返回的是一个四元数。
以上就是四元数插值的公式,在编程实现的时候我们要注意
使用点成来纠结夹角W,还有就是放夹角W很小的时候,sinw很小,但是cosw趋于1,因此,就变成了线性插值。
在这里,我们贴出cocos2dx 3.6中四元数的实现代码,大家学习学习。
- /**
- * Interpolates between two quaternions using spherical linear interpolation.
- *
- * Spherical linear interpolation provides smooth transitions between different
- * orientations and is often useful for animating models or cameras in 3D.
- *
- * Note: For accurate interpolation, the input quaternions must be at (or close to) unit length.
- * This method does not automatically normalize the input quaternions, so it is up to the
- * caller to ensure they call normalize beforehand, if necessary.
- *
- * @param q1x The x component of the first quaternion.
- * @param q1y The y component of the first quaternion.
- * @param q1z The z component of the first quaternion.
- * @param q1w The w component of the first quaternion.
- * @param q2x The x component of the second quaternion.
- * @param q2y The y component of the second quaternion.
- * @param q2z The z component of the second quaternion.
- * @param q2w The w component of the second quaternion.
- * @param t The interpolation coefficient.
- * @param dstx A pointer to store the x component of the slerp in.
- * @param dsty A pointer to store the y component of the slerp in.
- * @param dstz A pointer to store the z component of the slerp in.
- * @param dstw A pointer to store the w component of the slerp in.
- */
- static void slerp(float q1x, float q1y, float q1z, float q1w, float q2x, float q2y, float q2z, float q2w, float t, float* dstx, float* dsty, float* dstz, float* dstw);
- void Quaternion::slerp(float q1x, float q1y, float q1z, float q1w, float q2x, float q2y, float q2z, float q2w, float t, float* dstx, float* dsty, float* dstz, float* dstw)
- {
- // Fast slerp implementation by kwhatmough:
- // It contains no division operations, no trig, no inverse trig
- // and no sqrt. Not only does this code tolerate small constraint
- // errors in the input quaternions, it actually corrects for them.
- GP_ASSERT(dstx && dsty && dstz && dstw);
- GP_ASSERT(!(t < 0.0f || t > 1.0f));
- if (t == 0.0f)
- {
- *dstx = q1x;
- *dsty = q1y;
- *dstz = q1z;
- *dstw = q1w;
- return;
- }
- else if (t == 1.0f)
- {
- *dstx = q2x;
- *dsty = q2y;
- *dstz = q2z;
- *dstw = q2w;
- return;
- }
- if (q1x == q2x && q1y == q2y && q1z == q2z && q1w == q2w)
- {
- *dstx = q1x;
- *dsty = q1y;
- *dstz = q1z;
- *dstw = q1w;
- return;
- }
- float halfY, alpha, beta;
- float u, f1, f2a, f2b;
- float ratio1, ratio2;
- float halfSecHalfTheta, versHalfTheta;
- float sqNotU, sqU;
- float cosTheta = q1w * q2w + q1x * q2x + q1y * q2y + q1z * q2z;
- // As usual in all slerp implementations, we fold theta.
- alpha = cosTheta >= 0 ? 1.0f : -1.0f;
- halfY = 1.0f + alpha * cosTheta;
- // Here we bisect the interval, so we need to fold t as well.
- f2b = t - 0.5f;
- u = f2b >= 0 ? f2b : -f2b;
- f2a = u - f2b;
- f2b += u;
- u += u;
- f1 = 1.0f - u;
- // One iteration of Newton to get 1-cos(theta / 2) to good accuracy.
- halfSecHalfTheta = 1.09f - (0.476537f - 0.0903321f * halfY) * halfY;
- halfSecHalfTheta *= 1.5f - halfY * halfSecHalfTheta * halfSecHalfTheta;
- versHalfTheta = 1.0f - halfY * halfSecHalfTheta;
- // Evaluate series expansions of the coefficients.
- sqNotU = f1 * f1;
- ratio2 = 0.0000440917108f * versHalfTheta;
- ratio1 = -0.00158730159f + (sqNotU - 16.0f) * ratio2;
- ratio1 = 0.0333333333f + ratio1 * (sqNotU - 9.0f) * versHalfTheta;
- ratio1 = -0.333333333f + ratio1 * (sqNotU - 4.0f) * versHalfTheta;
- ratio1 = 1.0f + ratio1 * (sqNotU - 1.0f) * versHalfTheta;
- sqU = u * u;
- ratio2 = -0.00158730159f + (sqU - 16.0f) * ratio2;
- ratio2 = 0.0333333333f + ratio2 * (sqU - 9.0f) * versHalfTheta;
- ratio2 = -0.333333333f + ratio2 * (sqU - 4.0f) * versHalfTheta;
- ratio2 = 1.0f + ratio2 * (sqU - 1.0f) * versHalfTheta;
- // Perform the bisection and resolve the folding done earlier.
- f1 *= ratio1 * halfSecHalfTheta;
- f2a *= ratio2;
- f2b *= ratio2;
- alpha *= f1 + f2a;
- beta = f1 + f2b;
- // Apply final coefficients to a and b as usual.
- float w = alpha * q1w + beta * q2w;
- float x = alpha * q1x + beta * q2x;
- float y = alpha * q1y + beta * q2y;
- float z = alpha * q1z + beta * q2z;
- // This final adjustment to the quaternion’s length corrects for
- // any small constraint error in the inputs q1 and q2 But as you
- // can see, it comes at the cost of 9 additional multiplication
- // operations. If this error-correcting feature is not required,
- // the following code may be removed.
- f1 = 1.5f - 0.5f * (w * w + x * x + y * y + z * z);
- *dstw = w * f1;
- *dstx = x * f1;
- *dsty = y * f1;
- *dstz = z * f1;
- }














 686
686











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









