






平台采用某米1代扫地机。
stm32f103真实项目程序。
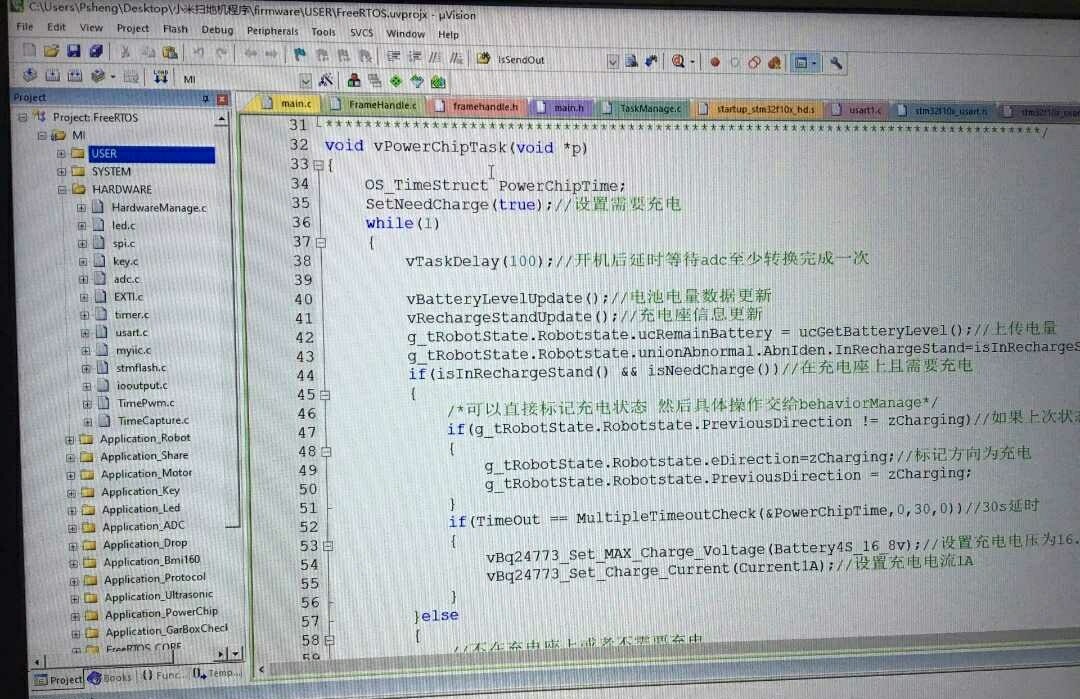
c原程序 keil工程。
目前只有32端代码能实现延边避障防跌落充电等功能。
适合需要学习项目与代码规范的工程师
硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。
软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。
代码注释清晰、代码规范好、每个函数必有输入输出范围参数解释。
YID:65688641625749421
MrCTZX
标题:基于stm32f103的某米1代扫地机硬件与软件驱动详解
摘要:本文主要介绍了一种基于stm32f103的某米1代扫地机的硬件与软件驱动。该扫地机采用了陀螺仪姿态传感器bmi160和电源管理bq24733等硬件,以及IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等软件驱动。文章详细解释了硬件与软件驱动的功能和实现原理,并着重介绍了代码注释清晰、代码规范好、每个函数必有输入输出范围参数解释的重要性。本文适合需要学习项目与代码规范的工程师。
关键词:stm32f103, 扫地机, 硬件驱动, 软件驱动, 陀螺仪姿态传感器, 电源管理, IIC, PWM, SPI, 多路ADC与DMA, 编码器输入捕获, 外部中断, 通信协议, IAP升级, PID, freertos操作系统, 代码注释, 代码规范
-
引言
1.1 背景介绍
某米1代扫地机是一种智能家居设备,具备延边避障、防跌落、自动充电等功能。本文将着重介绍基于stm32f103的硬件与软件驱动,详细解释其功能和实现原理。 -
硬件驱动
2.1 陀螺仪姿态传感器bmi160
陀螺仪姿态传感器bmi160是扫地机的姿态传感器,通过测量物体的角速度和角度来实现姿态控制。本节将详细介绍其工作原理和在扫地机中的应用。
2.2 电源管理bq24733
电源管理芯片bq24733负责对扫地机的电源进行管理,包括充电过程的控制和电池保护。本节将介绍其功能和在扫地机中的应用。
- 软件驱动
3.1 IIC
IIC总线是一种串行通信协议,用于在集成电路之间传输数据。本节将详细介绍IIC的工作原理和在扫地机中的使用。
3.2 PWM
PWM(脉冲宽度调制)是一种用于调整电平的方法,常用于控制电机的转速。本节将介绍如何使用PWM控制扫地机的电机转速。
3.3 SPI
SPI(串行外围接口)是一种用于在集成电路之间传输数据的通信协议。本节将介绍如何使用SPI实现设备间的通信。
3.4 多路ADC与DMA
多路ADC(模数转换器)与DMA(直接内存访问)是用于采集传感器数据和高效数据传输的技术。本节将详细介绍多路ADC与DMA的原理和在某米1代扫地机中的应用。
3.5 编码器输入捕获
编码器输入捕获是一种用于测量电机转速和位置的技术。本节将介绍编码器输入捕获的原理和在扫地机中的应用。
3.6 外部中断
外部中断是一种用于检测外部事件并触发中断的技术。本节将介绍外部中断的工作原理和在扫地机中的应用。
3.7 通信协议
扫地机需要与其他设备进行通信,以实现远程控制和数据传输。本节将介绍常用的通信协议,如UART、SPI、I2C等,并讨论其在扫地机中的应用。
3.8 IAP升级
IAP(In-Application Programming)是一种在应用程序中实现固件升级的技术。本节将介绍如何使用IAP升级扫地机的固件,并讨论其优势和应用场景。
3.9 PID
PID(比例-积分-微分)控制是一种常用的控制算法,用于实现系统的稳定控制。本节将介绍PID控制算法的原理和在扫地机中的应用。
3.10 freertos操作系统
freertos是一种开源的实时操作系统,用于管理和调度系统资源。本节将介绍freertos的特点和在扫地机中的应用。
-
代码规范与注释
4.1 代码规范的重要性
4.2 注释的作用与规范
4.3 每个函数必有输入输出范围参数解释 -
结论
本文详细介绍了基于stm32f103的某米1代扫地机的硬件与软件驱动,并着重强调了代码规范与注释的重要性。希望本文能对需要学习项目与代码规范的工程师有所帮助。
参考文献:
(无)
【相关代码,程序地址】:http://lanzoup.cn/641625749421.html















 1647
1647











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









